Ваша температура тела, если Вы не больны, остается почти постоянной независимо от того, находитесь ли Вы в холодной или горячей окружающей среде. Чтобы поддерживать это постоянство, ваше тело имеет температурную систему управления. Если ваша температура начинает увеличиваться выше нормальной, то Вы потеете, если она уменьшается, вы дрожите. Вы дрожите. Оба эти механизма используются для того, чтобы восстановить температуру тела назад к ее нормальной величине. Система управления поддерживает постоянство температуры. Система имеет вход от датчиков, которые сообщают то, какой температура является и затем сравнивает эти данные с тем, какой температура должна быть и обеспечивает соответствующий ответ' для того, чтобы получать требуемую температуру. Это пример управления с обратной связью; сигналы возвращаются с выхода, то есть фактической температуры, чтобы изменить реакцию тела, что позволит ему восстановить температуру к 'нормальной' величине. Управление с обратной связью осуществлено системой управления, сравнивающей возвращаемые фактические сигналы с выхода системы с теми, которые требуются, и настройка ее выхода соответственно. Один способ управлять температурой центрального отопления дома - когда человек стоит около печного переключателя с термометром и включает или выключает печь согласно показаниям термометра. Это грубая форма управления с обратной связью, использующая человека как элемент контроля. Обратная связь используется, чтобы сигналы, подающиеся с выхода, изменили входной сигнал. Более часто используемая система управления с обратной связью содержит термостат или диспетчера, который автоматически включает или выключает печь согласно различию между требуемой температурой и фактической температурой. Эта система управления поддерживает постоянство температуры. Если Вы собираетесь подбирать карандаш со скамьи, у вас имеется потребность, чтобы использовать систему управления, чтобы гарантировать, что ваша рука фактически заканчивается в карандаше. Это делается вами, наблюдая положение вашей руки относительно карандаша и внося изменения в её положении, поскольку она перемещается к карандашу. Имеется обратная связь информации относительно фактического положения вашей руки так, чтобы Вы могли изменять ваши реакции, чтобы создать требуемое ручное положение и движение. Эта система управления управляет расположением и движением вашей руки. Системы управления с обратной связью широко распространены, не только в природе и быту, но также и в промышленности. Имеется много промышленных процессов и механизмов, где требуется управление, осуществляемое людьми или автоматически. Например, имеется управление производственным процессом, где такие вещи как температура, уровень жидкости, поток жидкости, давление, и т.д. поддерживаются постоянными. Таким образом, в химическом процессе может иметься потребность поддержать уровень жидкости в резервуаре на определенном уровне или с определенной температурой. Имеются также системы управления, которые осуществляют последовательное и точное положение перемещающейся части или поддержание постоянной скорости. Это мог бы быть, например, двигатель, предназначенный для управления с постоянной скоростью или возможно механическим действием, в котором положение, скорость и действие инструмента автоматически управляется.
Существуют две основные формы систем управления, первая называется разомкнутой, а вторая - замкнутой. Различие между ними может быть проиллюстрировано на простом примере. Рассмотрим электрическую печь, в которой имеется выключатель ,обеспечивающий выбор нагревающегося элемента мощностью 1 кВт или 2 кВт. Если человек использовал нагревающийся элемент, чтобы нагреть комнату, он или она могли бы только включить элемент мощностью 1 кВт, если не требуется, чтобы в комнате была слишком высокая температура. Комната нагреется и достигнет температуры, которая определена только фактом включения элемента мощностью 1 кВт, а не 2 кВт. Если имеются изменения в условиях, например кто - то открывает окно, не имеется возможности восстановить выходную величину. Это - пример управления в разомкнутой системе, в которой не имеется никакой информации, возвращаемой назад к элементу, чтобы регулировать и поддерживать постоянной температуру. Система нагрева с нагревающимся элементом могла быть сделана замкнутой системой, если человек имеет термометр и включает или выключает элементы мощностью 1 или 2 кВт, согласно различию между фактической температурой и требуемой температурой, поддерживая температуру комнаты постоянной. В этой ситуации имеется обратная связь, вход в системе, отрегулирован согласно тому, является ли ее выход требуемой температурой. Это означает, что входная величина у выключателя зависит от отклонения фактической температуры от требуемой температуры, различие между которыми определяет элемент сравнения - человек в данном случае. Чтобы показать дальнейшие различия между разомкнутыми и замкнутыми системами, рассмотрим двигатель. В разомкнутой системе скорость вращения вала могла бы быть определена исключительно начальной установкой кнопки, которая воздействует на напряжение, приложенное к двигателю. Любые изменения в напряжениях питания, характеристики двигателя в результате температурных изменений, или нагрузка на валу изменят скорость вала, но не будут скомпенсированы. Здесь нет цепи обратной связи. В замкнутой системе, однако, начальная установка кнопки управления будет для определенной скорости вала, и это будет поддерживаться обратной связью, независимо от любых изменений в напряжении питания, характеристиках двигателя или нагрузке. В разомкнутой системе управления выход системы не имеет никакого влияния на сигнал входа. В замкнутой системе управления выходная величина влияет на сигнал входа, изменяя его, чтобы поддержать сигнал выхода на требуемой величине. Разомкнутые системы имеют преимущество, будучи относительно простыми и, следовательно, дешёвыми и надежными. Однако, они часто неточны так как не имеют никакого коррекции по ошибке. Замкнутые системы имеют преимущество, будучи сравнительно точными при согласовании фактического значения и требуемого значения величины. Они, однако, более сложны и поэтому более дорогостоящие с большим шансом поломки, что является следствием большего числа компонентов. Общая форма основной замкнутой системы состоит из следующих элементов (рис. 1):
1. Элемент cравнения. Он сравнивает требуемое по величине значение переменной, управляемое с помощью измеренной переменной, чем достигается и производится сигнал ошибки. Это может быть расценено как добавление заданного сигнала, который является положительным, к измеренному по величине сигналу, который является отрицательным в этом случае: Сигнал Ошибки = заданная величина сигнала - измеренная величина сигнала Используемый символ, вообще, для элемента, в котором сигналы суммированы -сегментированный круг, входы входят в доли. Входные сигналы все складываются, следовательно, входной сигнал обратной связи отмечен как отрицательный, а сигнал задания положительный, так что сумма даёт различие между сигналами. Цепь обратной связи - средство, посредством которого сигнал, связанный с фактическим достигаемым состоянием подаётся назад на вход, чтобы изменить сигнал входа. Обратная связь, как считается, является отрицательной обратной связью, когда сигнал, который возвращается назад, вычитается от величины входа. Это - отрицательная обратная связь, которая требуется для того, чтобы управлять системой. Положительная обратная связь происходит, когда сигнал, возвращаемый назад, добавляется к сигналу входа. 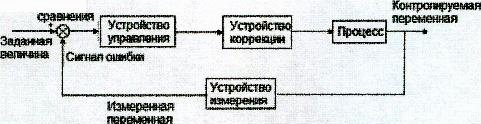 Рисунок 1 - Элементы замкнутой системы управления В замкнутой системе для человека, управляющего температурой комнаты, различными элементами являются: Контролируемая переменная - температура комнаты 1. Заданная величина - требуемая температура комнаты; 2. Элемент сравнения - человек, сравнивающий измеренную величину с требуемой температурой; 3. Сигнал ошибки - различие между измеренной и требуемой температурами; 4. Устройство управления - человек; 5. Устройство коррекции - выключатель печи; 6. Процесс - отопление печью; 7. Устройство измерения - термометр. Автоматическая система управления для контроля относительно температуры комнаты могла содержать температурный датчик, после подходящего создания условий сигнала, подавая электрический сигнал ко входу компьютера, где он сравнивается с установленной величиной и произведенным сигналом ошибки. На это тогда действует компьютер, чтобы выдать на его выход сигнал, который, после подходящего создания условий сигнала, мог бы использоваться для того, чтобы управлять нагревателем и, следовательно, температурой комнаты. Такая система может легко быть запрограммирована, чтобы создавать различные температуры в разное время дня. 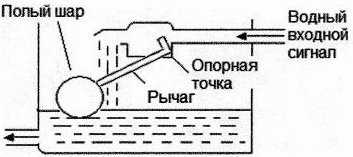 Рисунок 2 - Автоматический контроль относительно водного рычага Рисунок 2 показывает пример простой системы управления, используемой для поддержания постоянного водного уровня в резервуаре. Величина задания - это начальная уставка плеча рычага так, чтобы это только отключило водную поставку на требуемом уровне. Когда вода вытекает из резервуара, поплавок двигается вниз с водным уровнем. Это заставляет рычаг вращаться так, что вода входит в резервуар. Этот процесс продолжается, пока шар не поднялся до такой высоты, что это заставило бы рычаг отключить водную поставку. Это - замкнутая система управления с элементами: 1. Управляемая переменная - водный уровень в резервуаре; 2. Заданная величина - начальная уставка поплавка и положение рычага; 3. Элемент сравнения - рычаг; 4. Сигнал ошибки - различие между фактическими и начальными назначениями положения рычага; 5. Блок управления - опорный рычаг; 6. Единица коррекции - открытие откидной створки для прекращения водной поставки; 7. Процесс - водный уровень в резервуаре; 8. Измерительное устройство - плавающий шар и рычаг. Вышеописанное - пример замкнутой системы управления, состоящей только из механических элементов. Мы могли, однако, управлять уровнем жидкости посредством электронной системы управления. Таким образом, мы могли бы использовать датчик уровня, электрический сигнал которого используется, после соответствующего приведения к требуемым условиям, как вход в компьютер, где он сравнивается с сигналом задания и разницей между ними, а сигнал ошибки затем используется для выдачи соответствующего сигнала ответа с выхода компьютера. Затем он, после соответствующего приведения к требуемым условиям, используется для управления движением привода головок в клапане контроля потока и, значит, определяет количество воды, подаваемой в резервуар. Рисунок 3 показывает простую автоматическую систему управления скоростью вращения вала. Потенциометр используется для того, чтобы установить сигнал задания, то есть какое напряжение подаётся на дифференциальный усилитель как сигнал задания требуемой скорости вращения. Дифференциальный усилитель используется и для сравнения, и для усиления разницы между сигналом задания и сигналом обратной связи, то есть он усиливает сигнал ошибки. Усиленный сигнал ошибки затем подаётся на двигатель, который в свою очередь регулирует скорость вращающегося вала.  Рисунок 3 - Управление скоростью вращения вала |