Джерело: Вісник кафедри "Електротехніка" за підсумками наукової діяльності студентів. — Донецьк, ДонНТУ - 2009, с.92-93.
Стрибковий характер швидкості подачі очисних комбайнів з гнучким тяговим органом при незмінній швидкості обертання привода подачі зумовлено пружними властивостями ланцюгового тягового органа. Це викликає різко нерівномірне навантаження на електродвигун ріжучих органів, що спонукає, для запобігання “перекиду” двигуна, експлуатувати комбайни на зниженій швидкості подачі, а отже, – з меншою продуктивністю.
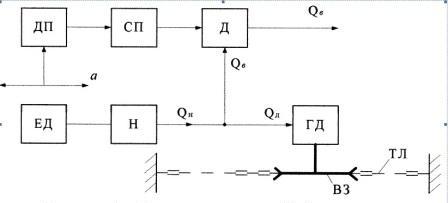
Цей недолік усувається замиканням привода подачі машини контуром прискорення. Одним із прикладів практичної реалізації може служити привод з високомоментним гідравлічним двигуном, зображений на рис.1. При незмінній подачі Qн насоса Н, який обертається електродвигуном ЕД ріжучих органів, витрата Qд робочої рідини через гідро двигун ГД, що визначає швидкість обертання двигуна, залежить від витоку Qв рідини через керований золотниковий дросель Д, включений паралельно двигуну: Qд = Qн – Qв.
Витік є функцією поточного прискорення а руху комбайна, тому на середнє значення швидкості обертання ведучої зірки ВЗ накладається змінна складова, що викликає в тяговому ланцюзі ТЛ демпфуюче зусилля відносно корпусу комбайна. Дросель керується давачем прискорення ДП, закріпленим в корпусі машини, через електромагнітний сервопривод СП.
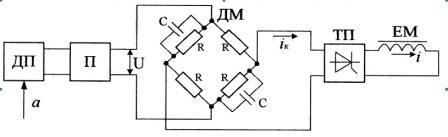
Схема системи керування дроселем приведена на рис.2, де П – фазочутливий підсилювач; ДМ – динамічний міст; ТП – тиристорний перетворювач; ЕМ – електромагніт.
Давач прискорення ДП будується на основі індуктивного акселерометра інерційної дії [1] і сумісно з вихідним фазочутливим підсилювачем описується передатною функцією:

де Kч, Тдп, ? – відповідно чутливість, стала часу та коефіцієнт загасання.
Оскільки коливання швидкості подачі здійснюються з частотою ? до 15…20 с-1, а стала часу давача прискорення ТДП<0,01 с, то без суттєвої похибки можна прийняти пропорційним зв'язок між вихідною напругою і прискоренням: U?Kч*а.
Резисторно-ємнісний збалансований динамічний міст призначено для підтримки нульового значення струму керування ік тиристорного перетворювача при відсутності прискорення комбайна, оскільки дрейф нуля давача прискорення можливий через змінення кута нахилу корпусу комбайна у зв’язку з гіпсометрією вугільного пласта та з інших причин. Залежність струму керування від вихідної напруги підсилювача описується передатною функцією:

де Kдм, K1, K2, K3, Тдм – відповідно коефіцієнти та стала часу моста.
Із (2) випливає, що завдяки своїм форсувальним властивостям, динамічний міст відпрацьовує випереджувальний сигнал керування, компенсуючий інерційні властивості електромагнітного сервопривода. Останній, що складається із тиристорного перетворювача та тягового електромагніта, є основним джерелом запізнювання керуючого впливу на витік дроселя. Його передатна функція:

де Kсп, Тем – відповідно коефіцієнт підсилення та стала часу електромагніта.
Рівняння (1)…(3) дозволяють провести частотний аналіз поведінки системи керування через амплітудні М(?) та фазові ?(?) частотні характеристики, які за цими рівняннями будуються (рис.3): М=|IЕМ|/|а|; ? – фазовий кут між функціями іЕМ(t) і а(t).
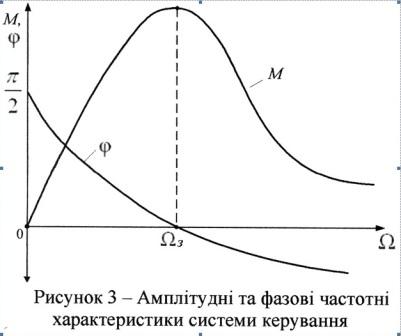
З рис.3 випливає, що динамічний міст в системі керування виконує дві важливі функції:
а) є загороджувальним фільтром для постійної складової або зумовленої повільним зміненням кута падіння пласта змінної складової сигналу давача прискорення (??0, М?0);
б) на визначеній частоті зрізу ?З, яка залежить від сталої , забезпечує фазовий кут ?=0, а в околиці точки ?З – достатньо мале значення даного кута. Очевидно, що і ефективність гашення коливань швидкості подачі буде тим вище, чим ближче знаходиться частота ?З до частот коливань швидкості подачі.