
Источник: IOS Press. ISSN 1383-5416 (Print) 1875-8800 (на сайте). Выпуск том 25, номер 1-4 / 2007. Страницы 521-527. Тематическая группа Материаловедение.
Сервопривод постоянного тока с батареей питания, ШИМ входного напряжения и микроконтроллером с низкой частотой дискретизации по сравнению с динамичным приводом используется для управления позиционированием. Двигатель измеряет угол, скорость и ток. Крутящий момент, трение и параметры двигателя являются неопределенными. Контроллер должен достичь приемлемой точности даже при критических комбинациях параметров. Таким образом, подробная модель способна воспроизводить напряжения и токи, а также сформулировать правильное положение. Несколько линейных и нелинейных концепций управления исследованы методом имитационного моделирования. Из-за аппаратных ограничений, которые можно найти во многих встроенных системах, линейный регулятор показывает свое превосходство над SMC.
Система моделируется из двух основных разделов: 1, контролируемой схемы моста для PWM-4 поколения с транзисторами, в том числе свободными диодами и измерительными резисторами. 2, привода постоянного тока с электрическим сопротивлением, индуктивности, электродвижущего напряжения, и его моментом инерции. Для диодов предполагалась экспоненциальная характеристика, в то время как все другие элементы описаны линейными соотношениями. Основная проблема заключается в переключении характера входного напряжения, следовательно, следует выделить несколько случаев [1]:
Высокой ШИМ сигнал: в этом случае диоды будут заблокированы, и поведение системы является линейное.
Низкий ШИМ сигнал: в данном случае эта система отрезана от питания и энергия накапливается в средствах массовой инертности и индуктивности двигателя. Должны быть рассмотрены два подпункта случаев:
Входное напряжение отрицательно. Ток двигателя идёт через диод и монотонно убывает.
Входное напряжение положительно. Все диоды заперты, но небольшой ток проходит через измерительные резисторы, поэтому обеспечивается способ измерения скорости.
Очень важно правильно передать состояния системы между последовательными включениями. Результаты проверки подтверждают отличные характеристики модели (рис.1).
Обратная связь регулятора работают для возврата угола, скорости, текущей и комплексной ошибки в позицию как и у регулятора положения. Ограниченное напряжение питания требует использования ограниченных интеграторов.
Контроллер состоит из каскада во внутреннем цикле, используя классический ПИ-регулятор скорости, вложенные во внешний П-регулятор положения.
Реализованы две SMC схемы: используя только одну выходную обратную связь [2], используя другие дополнительные текущие регуляторы [3]. Все контроллеры предназначены для доминирующей пары полюсов.
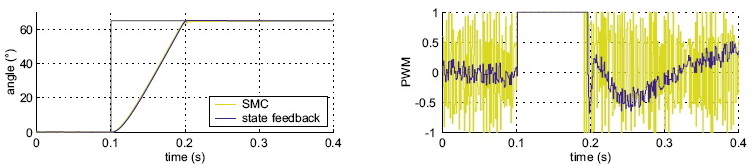
Результаты моделирования ясно показывают, что в соответствии с данными ограничениями линейные контроллеры работают лучше, чем схемы SMC. На рис.2 отклики на обеих схемах почти идентичны из-за насыщенной управляющей переменной (худший случай вариаций параметров плюс шум). Однако линейный регулятор показывает гораздо меньшие меры по контролю в результате меньшего энергопотребления. Дополнительные симуляции не показаны здесь и показывают, что эта неблагоприятная вибрация контроля может сильно сократить использование более высоких частот дискретизации [1].
Подробная и точная модель сервопривода постоянного тока была создана и подтверждена. Несколько схем контроля были проверены на прочность для моделирования и линейного регулятора положения обратной связи, оказавшиеся выше SMC-схем из-за серьезных ограничений (общие для многих встроенных систем), а именно: 1 ограниченном напряжении питания 2, ШИМ входной переменной 3 , сравнительно низкой частотой дискретизации.