Энергетические характеристики частотно-регулируемого асинхронного электропривода с различными алгоритмами управления позволяют осуществить рациональный выбор того или иного варианта системы применительно к конкретному механизму. Приведенные результаты выполнены с помощью математической модели. С помощью этой модели были сопоставлены энергетические характеристики частотно-регулируемого электропривода с системой скалярного управления в соответствии с законом М.П. Костенко и с системой векторного управления, впервые предложенной в [1].
В качестве исходных моделей были использованы структуры, функциональные схемы которых приведены на рис.1. На рис.1,а показана структура частотно-регулируемого электропривода со скалярной системой управления. На рис.1,б показана структура частотно-регулируемого электропривода с векторной системой управления. Общими для обеих структур являются блоки, реализующие модель асинхронного двигателя, модель ШИМ-модулятора, модель механизма (момент статической нагрузки) и модель задатчика интенсивности. В первой структуре использована двухконтурная система подчиненного регулирования, состоящая из внутреннего регулятора тока статора (действующего значения) и внешнего регулятора частоты вращения двигателя. Во второй структуре использованы модели блока вычислений, двухканального блока регуляторов и преобразователя координат [2]. Все расчеты велись в относительной системе единиц для получения общности результатов.
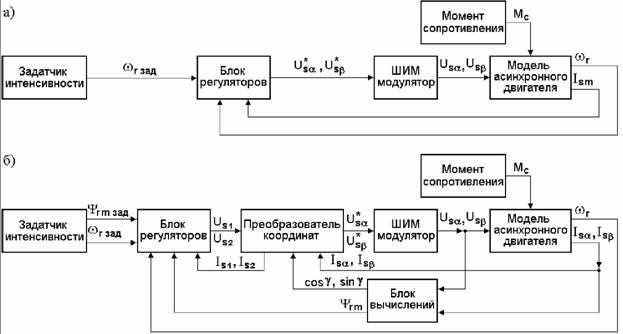
Рис.1. Функциональные схемы исходных моделей, структура системы со скалярным управлением (а) и структура системы с векторным управлением (б). |
Расчеты были проведены в среде MATLAB. Момент сопротивления после завершения пускового процесса нарастал линейно от холостого хода до 1,5Мном. Для определения и сопоставления энергетических характеристик был разработан дополнительный вычислитель. Входными сигналами для него являются составляющие напряжений и токов статорной обмотки двигателя и частота вращения ротора. То есть, используются только те переменные, которые в реальной системе могут быть определены путем прямого измерения. Вычислитель содержит блок вычисления электромагнитного момента двигателя по уравнению:
блок вычисления электромагнитной и механической мощности привода в соответствии с уравнениями:
а также блоки вычисления к.п.д. и коэффициента мощности двигателя по уравнениям:
Структурная схема вычислителя приведена на рис.2.

Рис.2. Структурная схема вычислителя энергетических характеристик частотно-регулируемого электропривода. |
В приведенном примере рассчитаны энергетические характеристики частотно-регулируемого электропривода с двумя различными алгоритмами управления. Характеристики были сняты при четырех постоянных уровнях управляющих воздействий, а именно:
В каждом случае характеристики  и и  выводились на общую координатную плоскость. Помимо этих характеристик можно получить и другие, например, потери мощности в электроприводе выводились на общую координатную плоскость. Помимо этих характеристик можно получить и другие, например, потери мощности в электроприводе  ,
где ,
где  . .
Энергетические характеристики электропривода приведены на рис.3. Для системы со скалярной системой управления – рис.3,а и для системы с векторным управлением – рис.3,б.
Рис.3. Энергетические характеристики частотно-регулируемого электропривода со скалярной (а) и с векторной (б) системой управления. |
Сравнение характеристик показывает, что в диапазоне регулирования частоты вращения меньшем, либо равном (1:2) к.п.д. векторной системы примерно на 3% выше. Коэффициент мощности в том же диапазоне регулирования у обеих систем изменяется практически одинаково при условии, что несущая частота ШИМ-модулятора одна и та же. Расширение диапазона регулирования приводит к резкому снижению энергетических показателей скалярной системы по отношению к векторной системе управления электроприводом. Поэтому при выборе того или иного алгоритма частотного управления асинхронным двигателем целесообразно руководствоваться не только возможностью обеспечения заданных эксплуатационных режимов и простотой алгоритмического обеспечения. Целесообразно также на стадии принятия той или иной системы к дальнейшей реализации провести предварительную оценку ожидаемых энергетических характеристик.
В частности, при выборе системы электропривода для турбомеханизмов, в которых традиционно используются скалярные системы управления, по энергетическим соображениям для механизмов большой мощности может оказаться более предпочтительным вариант векторного управления.
ЛИТЕРАТУРА
1. Blaschke F. Das Prinzip der Feldorientierung, die Grundlage fur die TRANSVEKTOR-Regelung von Asynchronmaschienen // Siemens-Zeitschrift, 1971.
2. Козярук А.Е., Рудаков В.В. Современное и перспективное алгоритмическое обеспечение частотнорегулируемых электроприводов. Под редакцией Народицкого А.Г. С-Петербург. Изд. Сант-Петербургской Электротехнической компании. 2004.
|