
Факультет: Электротехнический
Специальность: Электропривод и автоматизация промышленных установок
В современной промышленности большую долю среди всех подъёмно-транспортных механизмов занимают краны, на которые возложены разнообразные функции: транспортировка сырья, перемещение готовой продукции, монтаж и ремонт оборудования.
Одной из главных особенностей крановых механизмов является то, что в большинстве случаев груз с механизмом передвижения связан не жёстко, а с помощью упругих связей, что в свою очередь является основной причиной возникновения колебаний при его горизонтальном перемещении. Раскачивание груза возникает при пуске и торможении механизмов передвижения или поворота крана. Колебания заметно увеличивают время технологического цикла, вызывают колебания момента и неравномерное движение крана, увеличивают нагрузку на элементы конструкции кранов, вызывают усиленный износ отдельных узлов, а в некоторых случаях могут вызвать опасность столкновения груза с объектами, расположенными вблизи транспортируемого объекта. Также раскачивание груза имеет особое значение при автоматизации кранов и для кранов, осуществляющих точные монтажные операции. Возникающие колебания долго не затухают вследствие малого сопротивления воздуха и жёсткости каналов, поэтому необходимо применять специальные меры по демпфированию колебаний.
Цель работы – исследовать различные методы демпфирования колебаний в крановых электромеханических системах. Для достижения поставленной цели необходимо решить следующие задачи:
Недостаточно работ, которые бы полностью и основательно раскрыли все вопросы, связанные с демпфированием колебаний в системах с упругими связями.
Исследованием и оптимизацией двухмассовых электромеханических систем занимались такие преподаватели ДонНТУ:
Украинскими учёными в области кранового электропривода решаются следующие вопросы:
За пределами Украины решаются следующие вопросы:
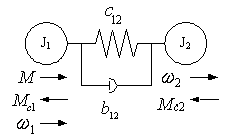
На рис. 1 приведена расчётная схема наиболее распространённой двухмассовой механической части электромеханической системы. На данной схеме все величины приведены к скорости вала двигателя и означают: J1 и J2 – моменты инерции первой (ротора двигателя) и второй (подвешенный груз) масс соответственно; w1 и w2 – их угловые скорости; c12 и b12 – эквивалентные коэффициенты жёсткости и вязкого трения упругого звена; M – момент двигателя; Mc1 и Mc2 – моменты сопротивления первой и второй массы, которые для упрощения представляют собой моменты сухого трения.
В общем случае такая система описывается уравнениями Лагранжа, которые могут быть записаны в следующем виде:
 ; (1)
; (1)где q и q* - обобщённая координата (в данном случае это углы поворота и угловые скорости первой и второй масс), i – число степеней свободы системы (для рассматриваемой системы i=2), Wк и Wп – кинетическая и потенциальная энергия.
После подстановки в уравнение (1) значений всех входящих в неё величин по всем координатам и приведения подобных, получим систему:
По полученным уравнениям можно составить структурную схему механической части, которая приведена на рис. 2.
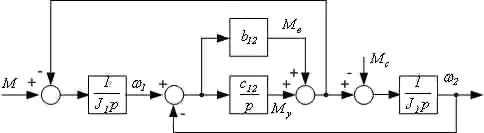
На структурной схеме обозначены:
Mв=b12(w1-w2) – момент вязкого трения,
 – момент упругой связи.
– момент упругой связи.
Для расчёта процесса колебания груза удобно воспользоваться расчётной схемой, которая приведена на рис. 3.
В точке M сосредоточены массы вращающихся элементов механизма передвижения и поступательно движущихся частей (m1). В точке К сосредоточена масса груза m2. Дифференциальные уравнения движения груза:
 ; (2)
; (2)где F(t) – ускоряющее или замедляющее воздействие, которое приложено в точке M и в общем случае зависит от времени; S0 – текущее расстояние от тележки до начала отсчёта в неподвижной системе координат; S – амплитуда колебаний груза в подвижной системе координат.
Преобразование уравнения (2) приводит к уравнению:
 ; (3)
; (3)Общее решение уравнения (3) при нулевых начальных условиях и постоянном усилии F(t) в периоды разгона и торможения будет иметь вид:
 ; (4)
; (4)Максимальная амплитуда колебаний груза будет равна:
 ; (5)
; (5)Частота колебаний груза
 ; (6)
; (6)Производная от (4) даёт следующий результат:
 ; (7)
; (7)Из формул (4) и (7) следует, что через промежуток времени
 ; (8)
; (8)отклонение груза S и скорость vK станут равными нулю, где n=1, 2, 3... количество колебаний груза. В противном случае колебания сохраняются, а их амплитуда зависит от начальных условий.
Существуют различные способы гашения колебаний и методы их реализации. Наиболее простыми и менее эффективными из них являются [12]:
Среди наиболее перспективных и дающих хорошие результаты можно выделить следующие методы:
1)Основанные на определении периода колебаний. К таким методам можно отнести следующие:
2) Модальное управление [10].
3) Основанные на использовании интеллектуальных модулей, к которым можно отнести:
Рассмотрим первые два метода несколько подробнее.
Разгон до половинной скорости. Метод основан на вычислении периода колебаний по формуле [3]:
 ; (9)
; (9)где L – длина троса, на котором подвешен груз; g – ускорение свободного падения; m1 и m2 – массы движущихся частей крана и груза соответственно.
Разгон двигателя осуществляется до половинной скорости, а затем в момент времени, который соответствует половине периода колебаний, продолжается разгон до основной скорости. В этом случае, происходит приложение ускорения, равного по амплитуде и периоду, но смещённого на полпериода относительно начальной точки колебаний. Таким образом, задача демпфирования колебаний сводится к определению периода колебаний, для чего, согласно (9), необходимо обладать информацией о длине каната и соотношении масс груза и подвижных частей крана.
Как показано в [13], период колебаний не зависит от m2, тогда формула (9) примет вид:

Последнее утверждение упрощает задачу расчёта периода колебаний
Управление, оптимальное по быстродействию. Для минимального времени разгона или торможения усилие (момент двигателя), приложенное к тележке, должно изменяться по тахограмме, приведенной на рис. 4.
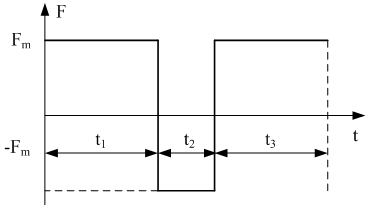
Как видно из приведенного рисунка, весь переходный процесс пуска разделён по времени на три участка. Время переходного процесса можно рассчитать по формулам:
где Тр – фиктивное время разгона массы m=m1+m2 от начальной скорости V1н до заданной V1зад при жёстком соединении тележки (m1) и груза (m2) и действии постоянной силы Fm.
Время t2 можно определить из уравнения:
где Ω – частота колебаний груза, которая вычисляется по формуле (6).
В ходе исследований согласно рис. 1 в приложении Simulink пакета Matlab была разработана модель асинхронного электропривода с двухмассовой механической частью. Период и амплитуда колебаний соответствует формулам (5) и (6).
Были промоделированы следующие методы демпфирования колебаний:
1. Управление, оптимальное по быстродействию. Результаты моделирования приведены на рис. 5.
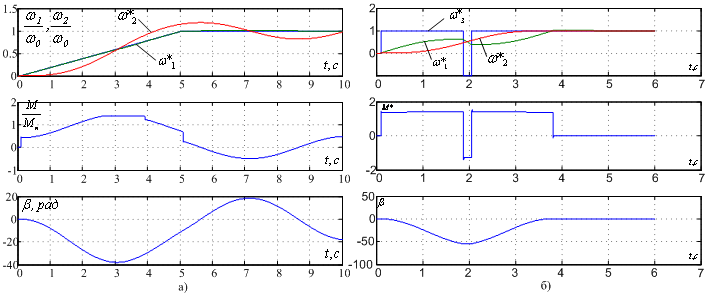
Из рис. 5 видно, что при использовании данного метода гашения колебаний к концу разгона
колебания груза прекращаются ( ), несмотря на то, что первоначальное отклонение груза несколько больше, чем в системе без гашения колебаний.
), несмотря на то, что первоначальное отклонение груза несколько больше, чем в системе без гашения колебаний.
2) Метод разгона до половинной скорости. Результаты моделирования приведены на рис. 6.
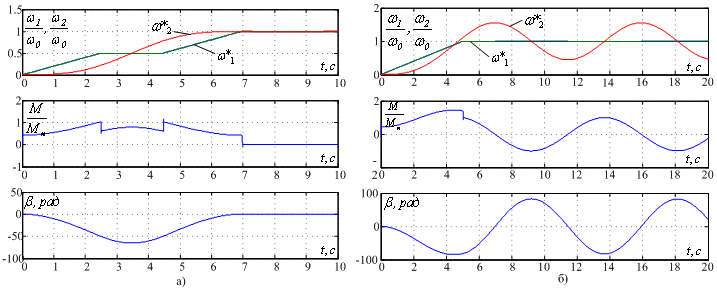
Как видно из рис. 6, по окончанию пуска колебания груза прекращаются
(). При использовании данного метода первоначальное
отклонение груза не больше, чем в системе без демпфирования колебаний, однако пуск несколько продолжительнее, чем
при использовании управления, оптимального по быстродействию.
В ходе дальнейших исследований планирует разработать и промоделировать систему демпфирования колебаний с FUZZY-регулятором и с использованием искусственных нейронных сетей.