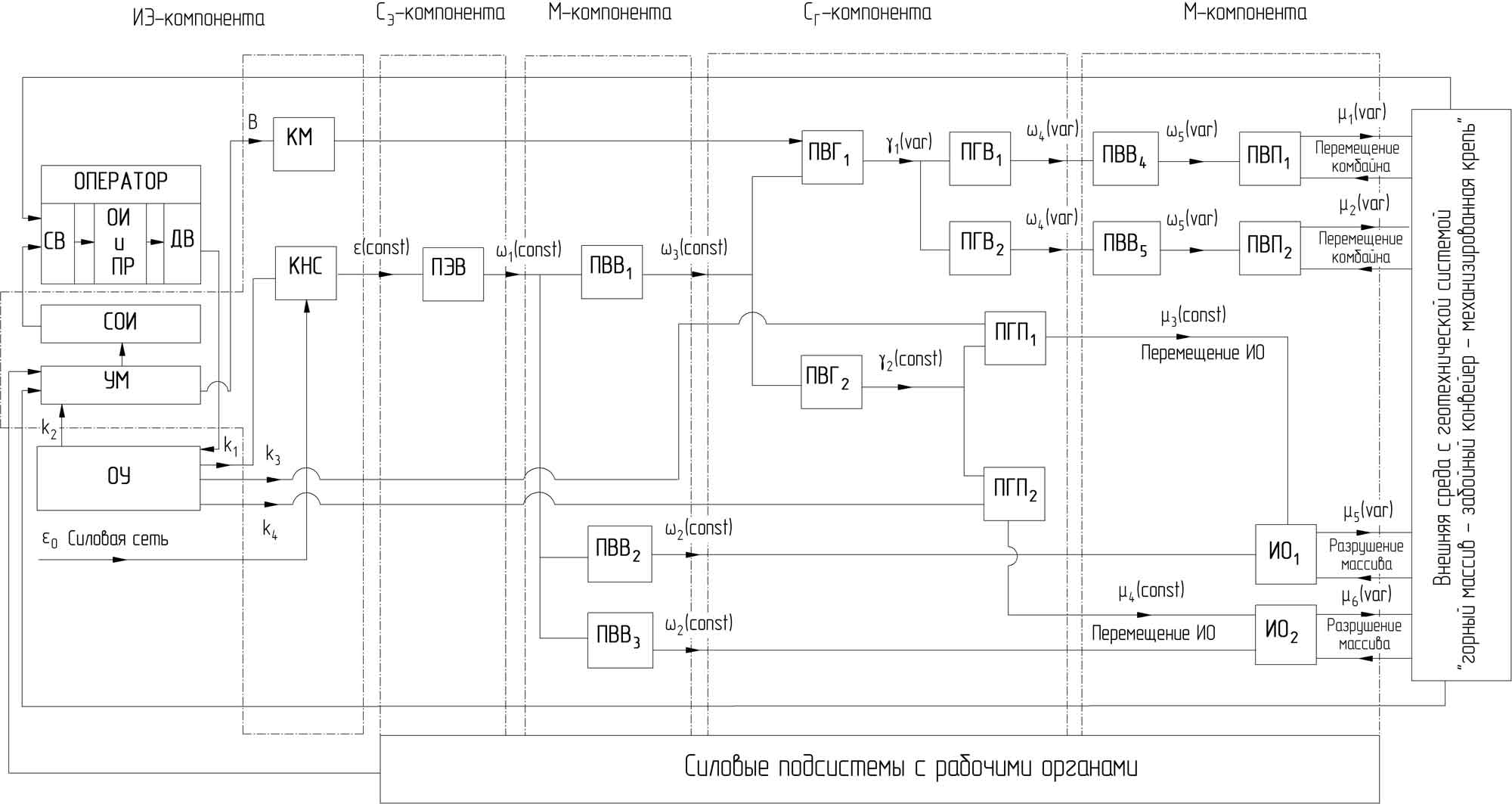
Рисунок 1 – S-модель системы «оператор-очистной комбайн типа РКУ13- внешняя среда»
На рис. 1 и 2, как развитие разработок [1], а также обобщенной структуры современных комбайнов [2], представлены структурные модели (S-модели) человеко-машинной системы «оператор – комбайн – внешняя среда» применительно к машинам прежнего (рис. 1) и нового (рис. 2) поколений. Развитие указанных S-моделей от приведенных в работе [1] заключается в следующем.
1. В S-модели включен человек-оператор со своими психофизиологическими возможностями [3] как исключительно важное интеллектуальное звено в человеко-машинной подсистеме управления очистными комбайнами, работающими в составе механизированных комплексов в условиях сложной и неблагоприятной для обслуживающего персонала внешней среды, которая отличается высокой степенью непредсказуемости появления нештатных и опасных ситуаций.
2. В структурные модели включена внешняя среда (ВС) с геотехнической системой «горный массив (угольный пласт – почва – кровля) – забойный конвейер – механизированная крепь». К параметрам внешней среды относятся также: уровень освещенности, концентрация пыли в шахтной атмосфере, температура воздуха, влажность, уровень шума и т.д.
3. Между структурными единицами «оператор», «комбайн», «внешняя среда» системы показаны обратные связи, что необходимо при рассмотрении вопросов управления при функционировании очистных комбайнов.
4. Комбайн типа РКУ рассматривается совместно с предназначенным для этих машин комплексом устройств автоматизации и управления КУАК-М, который выполняет функции регулятора скорости подачи Vп, т.е. в S-модель введены интеллектуальные структурные единицы [1,2] в виде информационно-электронных (ИЭ) компонент.
Имеются и другие отличительные особенности не принципиального характера (несколько уточнены некоторые блоки и их связи, в т.ч. приведены все имеющиеся в составе комбайна подсистемы привода исполнительных органов (ИО), подачи и подвески и перемещения ИО).
На рис. 1 и 2 применительно к оператору обозначены [3]: СВ – сенсорный вход человека-оператора; ОИ и ПР – блок обработки информации и принятия решений оператором; ДВ – двигательный выход человека; СОИ – средства отображения информации; ОУ – органы управления.
Рисунок 1 – S-модель системы «оператор-очистной комбайн типа РКУ13- внешняя среда»

Рисунок 2 – S-модель системы «оператор-очистной комбайн типа КДК- внешняя среда»
Оператор в условиях подвижного рабочего места с помощью органов чувств (сенсорный вход) воспринимает информацию о протекании технологических процессов и состоянии внешней среды непосредственно и с помощью соответствующих СОИ. Эта информация им обрабатывается, в результате чего принимается управленческое решение. Реализация принятого решения осуществляется с помощью управляющих воздействий человека на ОУ.
В состав представленных на рис. 1 и 2 ИЭ-компонент, механических (М), электротехнических (СЭ), гидравлических (СГ) структурных элементов очистных комбайнов входят следующие модули и преобразователи: УМ – управляющие модули, формирующие управляющие коды; КМ, КМ1 – КМ5 – коммутационные модули, как интерфейсы, осуществляющие преобразование управляющих кодов в соответствующие управляющие сигналы; КНС, КНС1 – КНС4 – коммутаторы напряжения силовой сети (пускатели), как интерфейсы, осуществляющие подачу электроэнергии к потребителям по сигналу управления; ПЭЭ – преобразователь (регулятор) частоты с автономным инвертором, осуществляющий преобразования напряжения и частоты силовой сети f1 в соответствии с управляющим кодом; ПЭВ, ПЭВ1 – ПЭВ5 – электродвигатели, преобразующие электрическую энергию в механическую (вращательное движение); ПВВ1 – ПВВ5 – редукторы, обеспечивающие передачу механической энергии; ПВГ, ПВГ1 – ПВГ2 –гидронасосы, преобразующие механическую энергию в гидравлическую; ПГВ1, ПГВ2 – гидромоторы, преобразующие гидравлическую энергию в механическую (вращательное движение); ПВП1 – ПВП2 – приводные элементы движителей, преобразующие вращательное движение в поступательное; ПГП1 – ПГП2 – силовые домкраты, преобразующие гидравлическую энергию в механическую (поступательное движение); ИО1, ИО2 – исполнительные органы шнекового типа.
Обе машины, наряду с традиционными (М, СЭ, СГ) компонентами, содержат структурные единицы на основе ИЭ-компонент в блоках УМ и ПЭЭ, т.е. необходимое условие для отнесения рассматриваемых объектов к мехатронному классу [1,2,4] выполняется.
Комбайнам типа РКУ и КДК присущи реализованные при проектировании интегрирующие связи типа «соединение» (+) [4] между всеми сопрягаемыми блоками М, СЭ, СГ и ИЭ-компонент, представленными на рис. 1 и 2 (интерфейсы типа КМ и КНС здесь не рассматриваются). Это свидетельствует о достигнутом при проектировании необходимом уровне функционально-структурной (ФС) интеграции компонент разной технической природы в составе комбайнов. Таким образом, в соответствии с достаточным условием мехатронности [1,2,4] обе эти машины следует отнести к мехатронному классу (мехатронизированные и мехатронные объекты).
У машин типа РКУ (с комплексом КУАК-М) возможно своеобразное «расчленение» компонент ИЭ и СГ, что соответствует переходу на ручной вид управления, часто устраивающий эксплуатационников. Это обусловлено [2] недостаточно высокой степенью синергетической интеграции между рассматриваемыми компонентами, достигнутой при традиционном последовательном проектировании. Указанное в свою очередь объясняется достаточно простыми управляющими воздействиями, необходимыми для реализации минимального варианта автоматизации при наличии гидравлических подсистем подачи и, соответственно, сравнительно малым числом контролируемых параметров. При этом доля ИЭ-компонент в структуре управления движением машины по данным [1] составляет 11%. Указанные машины следует отнести к мехатронизированным объектам.
Уровень синергетической интеграции между ИЭ и СЭ – компонентами у машин нового поколения, разработанных на основе метода параллельного проектирования, значительно выше, чем у комбайнов РКУ, что соответствует высокой степени сложности управления такими объектами с частотно-регулируемым асинхронным электроприводом, большим числом контролируемых и диагностируемых параметров и автоматизированных функций. В работе [1] подчеркивается, что «комбайны нового поколения могут взаимодействовать с оператором только посредством управляющего модуля (системы управления), который, получая команды от оператора, преобразует их в управляющий код, представляющий собой общую шину данных». «Необходимость в этом определяется, в первую очередь, особенностями работы преобразователя частоты с автономным инвертором, который для управления скоростью вращения приводного двигателя посредством широтно-импульсной модуляции осуществляет переключение с определенными временными интервалами силовых ключей с частотой 2500 Гц, контролируя при этом порядка 30 внутренних величин». По данным [1] доля ИЭ-компонент в структуре управления движением комбайнов типа КДК составляет 41%. Т.о., очистные комбайны нового поколения типа КДК являются мехатронными объектами.