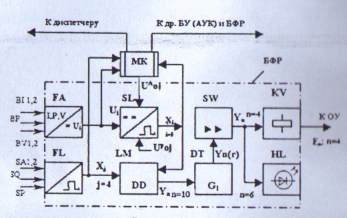
Рисунок 1 – Функциональная схема блока-расширителя.
ИСТОЧНИК: Автоматизація технологічних об’єктів та процесів. Пошук молодих. Збірник наукових праць Міжнародної науково-технічної конференції аспірантів та студентів в м. Донецьку 2001р. — Донецьк: ДонНТУ, 2001. — С. 42-45
Вакуленко Н.В., студент; Никулин Э.К., доц., к.т.н. (Донецкий государственный технический университет)
Современные магистральные конвейерные линии, предназначены для перевозки грузов, имеют значительную протяженность, большую производительность и оборудуются мощными электроприводами. В связи с этим первостепенными являются вопросы автоматического контроля и регулирования производительности конвейеров для стабилизации грузопотока и повышения эффективности работы этого вида транспорта, особенно при разветвленных схемах доставки угля от забоев до ствола шахты.
Для стабилизации грузопотока в настоящее время используют усредняющие бункера, установленные на ответвлениях, которые накапливают материал по мере их заполнения осуществляют разгрузку на ленточный конвейер при помощи питателей. При этом загрузка транспортного конвейера из бункера, как правило, происходит в ручном режиме, что приводит к значительным материальным потерям, к ухудшению режимов работы привода и снижению срока службы тягового органа конвейера.
Для устранения указанных недостатков, необходимо централизованное управление конвейерами и загрузочными устройствами на базе существующих средств контроля и автоматизации с использованием микроконтроллера. Для реализации такой системы управления требуется дополнительное устройство, расширяющее функциональные возможности существующих автоматизированных систем. Таким устройством является предлагаемый ниже блок функционального расширения БФР для известной аппаратуры автоматизированного управления конвейерами АУК-1М.
Функциональная схема блока приведена на рис. 1.
Рисунок 1 – Функциональная схема блока-расширителя.
Число таких блоков в общей системе управления определяются числом ответвлений, имеющие накопительные бункера в местах перегрузки на транспортный конвейер. Все блоки идентичны, каждый из них обслуживает цепочку, состоящую из бункера-накопителя, участкового №1 и транспортного №2 конвейера. В качестве источников информации использованы 2 типа датчиков: аналоговые и дискретные. Аналоговые: BI1.2 – датчики тока статорных цепей приводов соответственно участкового и транспортного конвейера, BP – датчик веса – электрогидравлические весы ЭГВ, BV1,2 – тахогенераторные датчики скорости движения ленты ДКС конвейеров №1 и №2. Дискретные: SA1,2 – блок-контакты магнитных пускателей приводов конвейеров №1 и №2, SQ – контакт выходных цепей реле уровня РКУ1М в бункере, SP – блок-контакт пускателя привода питателя бункера.
Сигналы от аналоговых и дискретных датчиков поступают на входное устройство, в котором формируются логические переменные при помощи двух типов формирователей: аналогового FA с схемой селекции SL (сигналы Xi, i=5) и дискретного FL (сигналы Xj, j=4).
Эти переменные используются в блоке обработки информации LM для формирования логических функций Yn, n=10 и в микроконтроллере МК для формирования скорректированных установок компораторов Uaoi (i=5) и координации работы других аналогичных объектов, находящихся в технологической цепи транспорта. Уставки Uaoi, вырабатываемые в микроконтроллере по глобальному критерию, имеют приоритет перед жесткими уставками Upoi, рассчитанными по глобальному критерию управления.
Глобальный критерий управления – это обеспечение максимального количества груза, доставляемого к стволу магистральным конвейером за сутки, при постоянной удельной нагрузке на ленту, минимальном времени простоев и холостой работе конвейеров, а также минимальных удельных затратах электроэнергии. Локальный критерий управления предусматривает обеспечение равномерной номинальной удельной нагрузки на ленту транспортного конвейера при минимальном числе включений-выключении конвейеров в течении рабочей смены.
Для учета инерционности управляемых объектов и обеспечения четкого срабатывания исполнительных реле и устройств индикации выходные сигналы с блока LM подаются на выходы элементов временной задержки DT, реализованных на одновибраторах G1, где формируются выходные сигналы заданной длительности Yn(?), которые затем усиливаются электронным ключем-инвертором SW. Одна часть усиленных сигналов поступает на исполнительное реле KV, посредством которых на объекты управления ОУ передаются команды управления, другая часть сигналов в виде информационных команд подводится к устройствам индикации.
Таким образом, использование разработанного устройства позволяет существенно расширить возможности базовой аппаратуры АУК 1М.