RUS | ENG ||
ДонНТУ>
Портал магістрів ДонНТУ

Жуковський Олексій Сергійович
Факультет: Енергомеханіки та автоматизації
Кафедра:Гірниче електрообладнання та автоматизація
Спеціальність: Автоматизоване управління технологічними процесами
Тема випускної роботи:
Дослідження фізичних процесів електротехнічного комплекса технологічної дільниці з квазічастотним перетворювачем, та розробка пристрою автоматичної розштибовки шахтного скребкового конвеєра
Науковий Керівник: Маренич Костянтин Миколайович
Матеріали до теми випускної роботи:
Про автора
Реферат по теме выпускной работы
Введення
В даний час для більшості транспортуючих механізмів та пристроїв у якості електроприводів використовуються застарілі системи, що мають відносно невисокими техніко-економічними показниками. Заміна електроустаткування на нове не завжди представляється можливим через відсутність коштів у замовника. Тому основний напрямок зараз - підтримка обладнання у працездатному стані і постійний контроль за його технічним станом. Оцінка технічного стану конкретної електромеханічної системи починається з візуального огляду ЕМС, оцінки діапазону зміни навантажень у межах розглянутого циклу, температури підшипникових вузлів, температури двигуна, наявності мастила і т.д.. Якщо з'являється незвичайний шум, посилюється вібрація системи, то необхідно вдатися до вібродіагностіческім методам-виміряти віброскорость і віброускореніе в характерних точках системи. Підвищення ресурсу безпосередньо пов'язане з обмеженням динамічних навантажень елементів ЕМС. Тому застосування спеціальних блоків, вузлів, що обмежують струми, моменти, які формують бажаний характер руху виконавчого органу, що підтримують коефіцієнт потужності на оптимальному рівні, буде сприяти продовженню терміну служби конкретного обладнання.
Актуальність
На вугільних шахтах Донбасу широко впроваджується комплексна механізація у всіх ланках складної комплексної ланцюга вуглевидобутку, автоматизує основні процеси, як у очисних, так і в підготовчих забоях. Основним напрямком механізації очисних робіт є впровадження виїмочних комплексів на базі узкозахватних комбайнів, Струга ізгібающіхся скребкових конвеєрів і гідрофіцірованной кріплення. Для пластів потужністю менше 0,7 м ще не створені машини, за допомогою яких можуть бути комплексно механізовані всі роботи в очисний забої. Для пластів потужністю 0,7 - 0,9 м створені механізовані комплекси, але їх продуктивність не висока через туги робочого простору очисного вибою. Пласти потужністю 0,9 - 1,2 м успішно розробляються механізованими комплексами. Досвід роботи на вугільних шахтах України та зарубіжжя свідчить, що для виїмки вугілля механізованими комплексами найбільш сприятливі по потужності шару від 1,2 до 3,5 м. На таких пластах можуть бути досягнуті високі показники вуглевидобутку і продуктивності праці. За критерієм зручності експлуатації механізованих комплексів найбільш сприятливим умовою є залягання пласта під кутом до 12 ". При цьому розробка може вестися лавамі, розташованими по простіранію і повстання шару. При куті падіння пласта 12-18? розробка здійснюється лавамі по простіранію. Для цих умов комплекси мають спеціальні пристосування для утримання обладнання від сповзання по лаві. Сучасні комплекси для очисних робіт експлуатуються при будь-якій газоносності пласта, однак продуктивність виемочних машин при цьому обмежується умовами провітрювання лави. При високій газоносності пластів потрібна велика вільний простір у лаві. В умовах тонких пластів необхідно проводити попередню і поточну дегазацію пласта і містить в собі товщі порід, використовувати спеціальні схеми провітрювання, апаратуру для газової захисту
В даний час існують наступні напрямки по розробці електроприводів підземних скребкових конвеєрів:
- використання в якості запобіжного пристрою СЛ конвеєра електромагнітних муфт сухого тертя;
- застосування електромагнітних муфт ковзання;
- застосування автоматизованого електроприводу на основі двигуна постійного струму;
- застосування асинхронного електроприводу з використанням тиристорного регулятора напруги;
- застосування перетворювачів частот
- застосування пускорегулюючих пристроїв на основі тиристорних комутаторів;
- застосування приводу з використанням двошвидкісних асинхронних електродвигунів.
Применение электромагнитных муфт сухого трения улучшает динамику пуска конвейера, потому что его двигатель в этом случае может включаться вхолостую, а затем, с помощью электромагнита, плавно увеличивает сжимающее усилия в СЛ. Однако практика эксплуатации показала, что после нескольких сработок стальные диски муфт притираются друг к другу, уменьшаются шероховатости их поверхностей, в результате чего муфта меняет свою механическую характеристику. Институтами Гипроуглемаш и Автоматгормаш разработан привод П110Е, содержащая планетарный редуктор и электромагнитную муфты скольжения (ЕМК). Основу последней составляет индуктор, расположенный в зазор магнитопровода с обмоткой возбуждения (ОС). Величина крутящего момента АД, переданного через планетарный механизм на СЛ конвейера, зависит от величины скольжения индуктора и регулируется током обмотки возбуждения. Основной недостаток привода с ЕМК - высокая сложность и стоимость изготовления, малый КПД системы, инерционность защиты СЛ от порывов при заклинивание, поскольку команда в защиту СЛ отрабатывается электромеханические системы. Применение привода с ЕМК связано с большими затратами как изготовителя, так и у потребителя. Существенными преимуществами автоматизированного электропривода скребковых конвейеров с применением двигателей постоянного тока (ДПС) последовательного возбуждения являются: возможность регулировки скорости движения тягового органа в широком диапазоне, уменьшение динамических нагрузок, повышение статического момента по сравнению с асинхронным электроприводом, исключение из состава поводу гидромуфты. Регулирование частоты вращения ДПС осуществляется посредством тиристорного управляемого выпрямителя. Для защиты тягового органа конвейера от повреждения при стопорении в приводе предусмотрены защити по производной момента погрузки и по интеграла от электромагнитного момента. Измерение момента погрузки производится косвенными методами по сигналам датчиков скорости и тока. Недостатки этого привода, которые ограничили его распространение в системах шахтного конвейерного транспорта, связанные с высокой стоимостью и низкой надежностью (коллекторных узел) ДПС, сложностью осуществления его взрывозащита, осложнением как системы электроснабжения и системы электропривода. Принцип действия тиристорных асинхронных электроприводов на основе трехфазных тиристорных регуляторов напряжения (ТРН) заключается в изменении величины напряжения подаваемых на АД горной машины при его пуске. Защита от порывов тягового органа при стопорении в них обеспечивается индукционно-динамическим торможением АД. Однако, управления пуском СК, что предполагает изменение в процессе пуска электромагнитного момента его АД по заданному закону, не позволяет получить стойкий степень пониженной скорости СЛ, определяет зависимость интенсивности разгона поводу от величины момента сопротивления движению. Наиболее широкими регулирующими возможностями АД обладают преобразователи частоты (ПЧ). Они руководят непосредственно частотой вращения ротора, изменением частоты напряжения на статора. Эти положительные качества реализуются без использования обратной связи по скорости привода. Однако ПЧ конструктивно сложные, содержат большое количество силовых полупроводниковых приборов (СНП). Это определяет их высокую стоимость, значительные габаритные параметры, затрудняет рудниковое взрывозащищенном исполнении их оболочек, эффективное охлаждение СНП. По этим причинам ПЧ трудно использовать в угольных шахтах. Маловентильные силовые тиристорных коммутаторов (СТК) тока с импульсным и фазовым регулированием величины трехфазной напряжения позволяют формировать квазисинусоидное напряжения пониженных частот, а значит - изменять частоту вращения асинхронного двигателя, подключаемый. В схеме тиристорных пускорегулирующее устройство для асинхронного электропривода горных машин был принят реверсивное силовой тиристорных коммутатор, который состоит из пяти пар параллельно включенных тиристоров. Такой коммутатор позволяет реализовать плавный пуск электродвигателя горной машины с помощью комбинированного квазичастотного управления. Предложенная схема управления коммутатором обеспечила повышение энергетических показателей привода, расширения диапазона регулирования при квазичастотном управлении. Однако в ней не в полной мере учтены особенности работы электропривода подземного скребковых конвейеров: не предусмотрены средства защиты его тягового цепи от динамических перегрузок. Дальнейшим этапом в развитии тиристорных электропривода СК было создание тиристорных пускозащитного аппарата АТКС. Данный аппарат, выполненный на основе нереверсивного СТК (содержащий три пары параллельно включенных силовых тиристоров), обеспечивает: ¬ плавный пуск со стойкой ступенью пониженной скорости (без использования обратной связи) с помощью квазичастотного электропитания приводных двигателей; ¬ ограничение динамических усилий в тягового цепи при заклинивание с последующим устранением этого заклинивания. Однако влияние ЭДС вращения ротора на процессы в системе СТК-АД является причиной высоких значений квазисинусоидальных токов, близких к номинальных пусковых. Это обусловливает необходимость ограничения продолжительности квазичастотного электропитания АД по критерию его допустимого нагрева. Недостатками данных аппаратов является также сложность конструкции, обусловленная наличием СПП со средствами их охлаждения, и необходимость применения специальных защит от аварийных режимов эксплуатации СТК. Перспективным средством осуществления пуска поводу со степенью пониженной скорости, а также средством реализации пониженной скорости привода в длительном режиме (для доставки оборудования в очистной забой) является двухскоростной асинхронный короткозамкнутый двигатель, оснащенный двумя статорными обмотками с разным числом пар полюсов. Установка двухскоростного двигателя позволяет исключить из привода конвейера гидромуфты, имеющего низкие эксплуатационные показатели.
Научная значимость
Застосування електромагнітних муфт сухого тертя поліпшує динаміку пуску конвеєра, тому що його двигун у цьому випадку може включатися вхолосту, а потім, за допомогою електромагніта, плавно збільшує стискуюче зусилля в СЛ. Однак практика експлуатації показала, що після кількох спрацьовувань сталеві диски муфт притираються один до одного, зменшуються шорсткості їхніх поверхонь, у результаті чого муфта змінює свою механічну характеристику. Інститутами Гіпроуглемаш і Автоматгормаш розроблений привід П110Е , що містить планетарний редуктор і електромагнітну муфту ковзання (ЕМК). Основу останньої складає індуктор, розташований у зазорі магнитопроводу з обмоткою збудження (ОЗ). Величина обертаючого моменту АД, переданого через планетарний механізм на СЛ конвеєра, залежить від величини ковзання індуктора і регулюється струмом обмотки збудження. Основний недолік приводу з ЕМК - висока складність і вартість виготовлення, малий ККД системи, інерційність захисту СЛ від поривів при заклинюванні, оскільки команда на захист СЛ відпрацьовується електромеханічною системою. Застосування приводу з ЕМК зв'язано з великими витратами як у виготовлювача, так і в споживача. Істотними перевагами автоматизованого електроприводу скребкового конвеєра з застосуванням двигунів постійного струму (ДПС) послідовного збудження є: можливість регулювання швидкості руху тягового органа в широкому діапазоні, зменшення динамічних навантажень, підвищення статичного моменту в порівнянні з асинхронним електроприводом, виключення зі складу приводу гідромуфт. Регулювання частоти обертання ДПС здійснюється за допомогою тиристорного керованого випрямляча. Для захисту тягового органу конвеєра від ушкодження при стопорінні в приводі передбачені захисти по похідній моменту навантаження і по інтегралу від електромагнітного моменту. Вимір моменту навантаження провадиться непрямими методами по сигналах датчиків швидкості і струму. Недоліки цього приводу, що обмежили його поширення в системах шахтного конвеєрного транспорту, зв'язані з високою вартістю і низькою надійністю (колекторний вузол) ДПС, складністю здійснення його вибухозахисту, ускладненням як системи електропостачання так і системи електроприводу. Принцип дії тиристорних асинхронних електроприводів на основі трифазних тиристорних регуляторів напруги (ТРН) полягає в зміні величини напруги подаваної на АД гірничої машини при його пуску. Захист від поривів тягового органу при стопоріннях у них забезпечується індукційно-динамічним гальмуванням АД. Однак, керування пуском СК, що припускає зміну в процесі пуску електромагнітного моменту його АД по заданому закону, не дозволяє одержати стійкий ступінь зниженої швидкості СЛ, визначає залежність інтенсивності розгону приводу від величини моменту опору руху. Найбільш широкими регулювальними можливостями АД володіють перетворювачі частоти (ПЧ) . Вони керують безпосередньо частотою обертання ротора, зміною частоти напруги на статорі. Ці позитивні якості реалізуються без використання зворотного зв'язку по швидкості приводу. Однак, ПЧ конструктивно складні, містять велику кількість силових напівпровідникових приладів (СНП). Це визначає їхню високу вартість, значні масогабаритні параметри, утруднює рудникове вибухозахищене виконання їхніх оболонок, ефективне охолодження СНП. З цих причин ПЧ важко використовувати у вугільних шахтах. Маловентильні силові тиристорні комутатори (СТК) струму разом з імпульсним і фазовим регулюванням величини трифазної напруги дозволяють формувати квазисинусоїдні напруги знижених частот, а значить – змінювати частоту обертання асинхронного двигуна, що підключається. У схемі тиристорного пускорегулюючого пристрою для асинхронного електроприводу гірничих машин був прийнятий реверсивний силовий тиристорний комутатор, що складається з п'яти пар паралельно включених тиристорів. Такий комутатор дозволяє реалізувати плавний пуск електродвигуна гірничої машини за допомогою комбінованого квазичастотно-фазового керування. Запропонована схема керування комутатором забезпечила підвищення енергетичних показників приводу, розширення діапазону регулювання при квазичастотному керуванні. Однак у ній не повною мірою враховані особливості роботи електроприводу підземного скребкового конвеєра: не передбачені засоби захисту його тягового ланцюга від динамічних перевантажень. Подальшим етапом у розвитку тиристорного електроприводу СК було створення тиристорного пускозахисного апарата АТКС . Даний апарат, виконаний на основі нереверсивного СТК ( що містить три пари паралельно включених силових тиристорів), забезпечує : ¬ плавний пуск зі стійкою ступінню зниженої швидкості (без використання зворотного зв'язку) за допомогою квазичастотного електроживлення привідних двигунів; ¬ обмеження динамічних зусиль у тяговому ланцюзі при заклинюванні з наступним усуненням цього заклинювання. Однак вплив ЕРС обертання ротора на процеси в системі СТК-АД є причиною високих значень квазисинусоїдних струмів, близьких до номінальних пускових. Це обумовлює необхідність обмеження тривалості квазичастотного електроживлення АД за критерієм його припустимого нагрівання. Недоліками даних апаратів є також складність конструкції, обумовлена наявністю СПП із засобами їхнього охолодження, і необхідність застосування спеціальних захистів від аварійних режимів експлуатації СТК. Перспективним засобом здійснення пуску приводу зі ступенем зниженої швидкості, а також засобом реалізації зниженої швидкості приводу в тривалому режимі (для доставки устаткування в очисний вибій) є двошвидкісний асинхронний короткозамкнений двигун, оснащений двома статорними обмотками з різним числом пар полюсів. Установка двошвидкісного двигуна дозволяє виключити з приводу конвеєра гідромуфту, що має низькі експлуатаційні показники.
Практична цінність
З появою силовий перетворючої техніки стало реальним управління асинхронним двигуном шляхом зміни параметрів напруги - зокрема, найпростішим в реалізації способом слід вважати фазові управління асинхронного двигуна. Спосіб заснований на застосуванні трьох фазного тиристорного регулятора напруги та систем імпульсно фазового управління.
Система імпульсно-фазового управління призначена для форми-вання кутів отпіранія тиристорів регулятора напруги, дія СІФУ пояснюється діаграмами напруг.Стосовно АД, фазових управління є непрямим способом регулювання швидкості, оскільки є квадратичний зв'язок між величиною живильнї напруги і електромагнітним моментом який розвиває асинхронний двигун.
У зв'язку з цим, область застосування даного способу обмежена пусковим пристроєм електроприводів. При тірістороном управлінні асинхронний електропривод весь час знаходиться в послідовно змінюють один-одного перехідних режимах, викликаних перемикання тиристорів. При кожній комутації ланцюгів в АД виникає електромагнітний перехідний процес, обумовлений зміною магнітного стану машини і відповідно появою вільних складових потоку які, взаємодіючи з основною (вимушеної) складової, створюють знакопеременние перехідні моменти, максимальні значення яких можуть на порядок більше перевищувати максимальні значення моменту, що розвивається АД в установи режимі. Динамічна механічна характеристика на відміну від статичної відображає зв'язок між миттєвими значеннями моменту і швидкості АД в процесі переходу електроприводу з одного рівноважного стану в інше. Статична механічна характеристика висловлює зв'язок між середніми значеннями моменту і швидкості в сталих режимах і являє собою лише геометричне місце точок рівноваги системи двигун-навантаження.
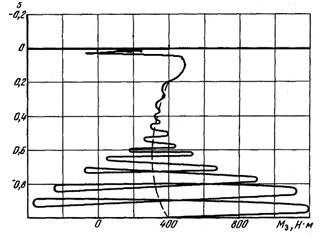
Пускова електродинамічна характеристика АД
Як показано вище, управління динамічними режимами (формування динамічних характеристик) зводиться до управління електромагнітними перехідними моментами. Оскільки причиною появи перехідних моментів є виникнення вільної складової магнітного потоку, то загальний принцип управління ім полягає у впливі на значення цієї вільної складової, однозначно визначається початковою швидкістю зміни потоку. При постійній частоті живильної мережі єдиним способом управління струмом намагнічіванія і відповідно створюваним ім потоком є вплив на систему доданих до АД напруг, яке може бути реалізовано одним з трьох способів. Перший зводиться до обмеження додається до АД напруги з метою зменшення усталеного значення магнітного потік; другий - до зменшення швидкості зміни доданої до АД напруги і, отже, тока намагнічіванія; третій - до детермірованной подачі напруги на АД для створення сприятливих початкових електромагнітних умов у момент включення , що забезпечують мінімальну амплітуду перехідного моменту.
Стосовно до рудничні електроприводом, найбільше поширення отримали системи плавного пуску, без зворотного зв'язку по швидкості «soft-start».
Апарати управління пуском гірничої машини
Більш ефективним застосуванням параметричного управління, слід вважати схему апарата АПМ-1 управління пуском ел. привода гірничої машини. Пристрій і роботу апарату АПМ розглянемо на прикладі роботи стрічкового конвеєра.
Апарат розроблявся з метою скорочення поривів стрічки і виходу з ладу редуктора (шестерни, срезние пальці та ін) і електродвигуна за рахунок забезпечення плавного пуску конвеєра, зміни тривалості розгону і зниження динамічних навантажень у приводі і робочому органі конвеєра. Зведення до мінімуму ймовірності пробуксовки стрічки на привідної барабані при запуску конвеєра, що дозволить виключити підвищення температури барабана і стрічки. Нормалізація зупинки стрічкового конвеєра, за рахунок динамічного гальмування електроприводу після його відключення і, як наслідок виключення засинання вугіллям місця Пересип і зниження витрат праці на його зачищенні. Зниження пускових струмів електродвигуна при живленні від регулятора напруги у порівнянні зі звичайним пуском короткозамкнутого асинхронного двигуна. Можливість отримання короткострокових проміжних швидкостей руху робочого органу машини на основі харчування АД квазісінусоідальнимі напруженнями знижених частот. Реверс електроприводу з допомогою роз'єднувача магнітного пускатели. Перераховані вище переваги дозволяють знизити час простоїв однієї конвеєрної лінії в середньому на 40% або на 80-85 годин на рік, а також знизити витрати праці на ремонт і відновлення одного конвйера в середньому на 40% або на 155-165 чол. годин на рік.
Квазичастотне управління
Формування квазісінусоідального напруги здійснюється за допомогою модуляції напруги мережі частоти сигналом низької частоти. Тиристори ТК включають групами, чергуються із заданою послідовністю. При формуванні однакових за гармонійного складу фазні напруг протягом одного періоду модуляції коммутіруют шість груп тиристорів через рівні інтервали часу.
На малюнку представлені діаграми формування ділянок квазісінусоідальних напружень в фазах навантаження на протязі одного такого інтервалу часу. Включений Тиристор VS1 визначає формування позитивної полуволни напруги у фазі А, а тиристори VS4 і VS6 визначають формування негативної полуволни напружень в фазах B і C. На ділянці t0 - t1 до навантаження приложено лінійне напруга UAB. Тому фазні напруги на навантаженні, прикладені з виходу ТК, визначаються виразами:
Де ua, ub - напруги фаз А и В мережі.
Формування ланки з квазісинусоідальною напругою:
А- Діаграма напруги; б – схема підключення навантаження;
Анімація була розроблена у програмі MP Gif Animator. Складається із 7 кадрів, кожний з яких відображений із задержкою 20 мс.
Для реалізації фазового зсуву між напруженнями U'A; U'B; U'C; рівного 2? / 3 рад., Кожен середній відрізок синусоїда в полуволнах обох полярностей повинен відстояти від попереднього і наступного середніх відрізків синусоїда в інших фазах на інтервалах часу, за щонайменше рівний: TC / 6 при збігу порядків чергування фаз мережі та комутатора; Tc / 2 при збігу порядків чергування фаз мережі та комутатора.
Визначаючи загальний характер протікання процесів в системі ТК-АД, гармонійний аналіз разом з тим, не враховує ряд особливостей. Кожна полуволна квазісінусоідального напруги, формованого ТК, складається з чергуються відрізків синусоїда напруги мережі та пауз, визначених закритим станом тиристорів. Тому квазічастотное електроживлення АД може бути представлене як процес подачі на статор напруги модулюють частоти.
Наведені співвідношення Квазісінусоідальних і номінального пускового струмів АД обумовлюють необхідність обмеження тривалості квазічастотного електроживлення АД за критерієм його допустимого нагріву, або введення фазового регулювання величини квазісінусоідального напруги
.
Висновок
Таким чином, на підставі аналізу існуючих технічних рішень, встановлено, що найбільш придатним, з точки зору вирішення завдань автоматичного усунення заштібовкі СК, є квазічастотное електроживлення АД з використанням частотної модуляції: 7,14 Гц (в пряму сторону) і 10 Гц у зворотній бік . У цьому випадку доведена можливість стійкої роботи АД на зниженої швидкості з збільшеним у 2 рази пусковим моментом. Однак попередніми моделюванням встановлено, що у зв'язку з наявністю високого рівня зворотного ЕРС двигуна моделюючий частоти, можуть бути змінені фактичні моменти комутації тиристорів силового комутатора і збільшений споживаний струм. У зв'язку з цим, наукову актуальність представляють дослідження процесів в АД при квазічастотном електроживлення які обумовлюють амплітуду та фазу цієї зворотнього ЕРС.
- Петров Л.П. Тиристорные преобразователи напряжения для асинхронного электропривода /Л.П.Петров. и др.-М.:Энергоатомиздат, 1986ю-200 с.: ил.
- Асинхронный электропривод горных машин с тиристорными коммутаторами. Маренич К.М.- Донецк: ДонНТУ 1997 – 64 с
- Чиликин М.Г., Сандлер А.С. Общий курс электропривода. – Энергоатомиздат, 1981. – 576 с.
- Исакаев А.И. и др. Эффективные способы охлаждения силовых полупроводниковых приборов. – Л.: Энергоиздат. 1982. – 136с.
- Петров Л.П. Асинхронный электропривод с тиристорными коммутаторами - М.: Энергия, 1970. 128 с.
- Динамика вентильного электропривода постоянного тока/ Под ред. А.Д. Поздеева. М.: Энергия, 1975. 224 с.
- Чиликин М.Г., Ключев В.И. Теория автоматизированного электропривода М.: Энергия, 1979. 616 с.
Про автора