
Источник: Проблеми моделювання та автоматизації проектування динамічних систем. — 2008 / Наукові праці Донецького національного технічного університету. Серія "Проблеми моделювання та автоматизації проектцвання динамічних систем". Випуск: 58 - Донецьк: ДонНТУ. - 2008.
Системы моделирования на основе операционных систем реального времени (ОСРВ) должны удовлетворять следующим известным требованиям [1]:
Базовым модулем, обеспечивающим функционирование жестких динамических систем реального времени (СРВ), должен быть специализированный менеджер задач реального времени. При решении СРВ-задач моделирования возникает необходимость в разработке уникальных систем для каждой аппаратной платформы и модели. Более эффективным представляется решение – использовать в данных целях модули существующих операционных систем (ОС), профилированных соответствующим образом. Основная задача при этом сводится к созданию специализированного планировщика для распространенных операционных систем класса Windows, Unix. В этой связи актуальным является исследование архитектурных возможностей по минимизации накладных расходов, возникающих в результате выполнения сервисных операций при планировании и последующем выполнении многочастотных моделей реального времени. При этом считаем, что подзадаче или группе подзадач будет соответствовать поток многопоточного приложения. Первым шагом в решении данной задачи является исследование программных моделей, учитывающих как архитектурные особенности персональных компьютеров, так и операционной системы. Для этого необходимо определить характеристики временных задержек и прерываний как исходных данных для расчета параметров будущей системы.
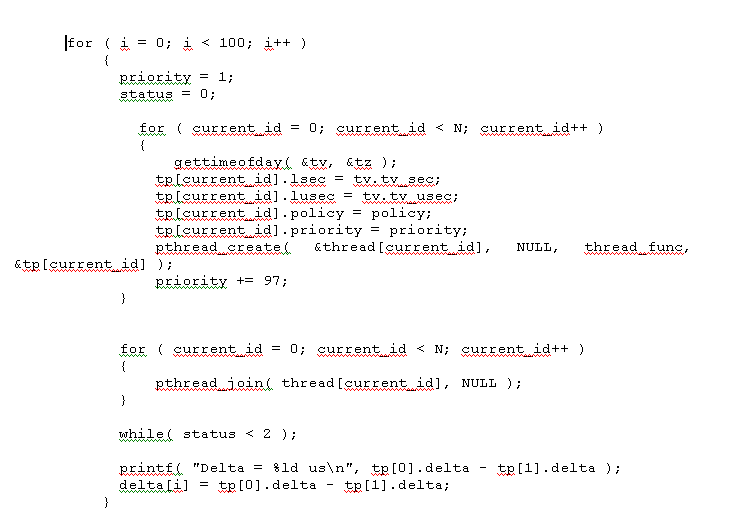
Определяющей особенностью модели является то, что у главной (управляющей) программы приоритет должен быть выше, чем у дочерних потоков. Иначе поток, имеющий больший приоритет, чем программа, будет получать все процессорное время на свое выполнение и сама программа получит управление только после завершения работы потока, что является последовательным выполнением. В приведенном процессе работают два потока с девяносто восьмым и первым приоритетами, сам процесс имеет девяносто девятый приоритет. По промежуточным выводам из функций обработки потока и времени выполнения (рис. 2) видно, что поток с девяносто восьмым приоритетом полностью отобрал управление у потока с первым приоритетом, что привело к их последовательному выполнению (хотя они и запустились одновременно).

Кроме того, время выполнения потока с первым приоритетом гораздо больше, так как оно содержит период простоя потока, пока выполнялся поток с девяносто восьмым приоритетом. Данный эксперимент показывает, что система в режиме реального времени производит монопольное выполнение потоков с большим приоритетом, что и необходимо для целей поставленной задачи. Для дальнейшего исследования временных параметров системы необходимо выбрать способы измерения времени и выполнения задержек.
При измерении временных интервалов выполнения различных процессов в вычислительной системе наиболее точным способом является использование внешнего оборудования, не нагружающего систему дополнительными накладными расходами, которые вносит механизм измерения. Определим возможности по измерению времени, предоставляемые исследуемой программной и аппаратной средой, в случае, если не используется дополнительное внешнее оборудование. Из обеспечиваемых интерфейсом системных функций ОС была выбрана функция GETTIMEOFDAY(2), так как возвращаемый ею формат времени включает микросекунды, что является достаточным для многих конкретных задач. Для исследования задержек, вносимых функцией GETTIMEOFDAY(2), в модели было выполнено последовательно многократное циклическое обращение к функции и получены следующие результаты (табл.1):
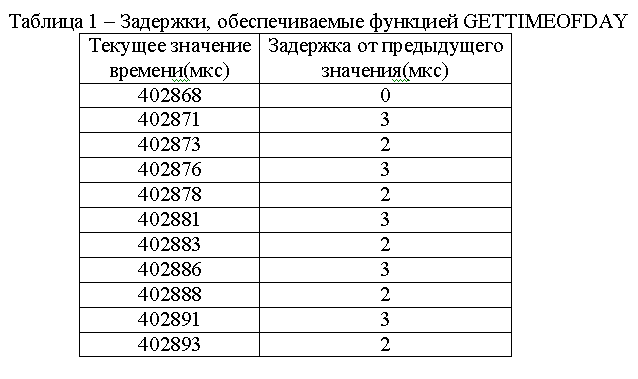
В ходе экспериментов было получено, что максимальное значение задержки равно 3 мкс, а минимальное – 2 мкс (табл. 1). Данные задержки удовлетворяют временному диапазону исследуемой модели, поэтому использование данной функции оправдано. Более точные результаты могут дать только данные, полученные непосредственно с использованием аппаратных средств компьютера [5]. Одним из способов получениея таких данных является использование инструкции микропроцессора rdtsc, которая возвращает значение счетчика, хранящего количество тактов с момента начала работы микропроцессора. Зная его частоту, можно получить значение времени, соответствующее одному такту данного процессора:

где t – длительность тиков в микросекундах, delta_rdtsc – количество тактов (1 для одного такта ), cpu_frequency – частота процессора (в МГц). Таким образом, не учитывая конвейеризации, можно заключить, что накладные задержки возникают только из-за времени выполнения одной инструкции. Оно может быть определено, поскольку эта инструкция будет выполняться одно и то же количество тактов на одной конфигурации. Для современных компьютеров время выполнения данной инструкции, определенное этим методом, меньше 1мкс (для процессоров с частотой, превышающей 200 МГц). Следовательно, инструкция rdtsc является наиболее точным средством измерения времени во временном интервале данной задачи, поэтому ее и следует использовать.
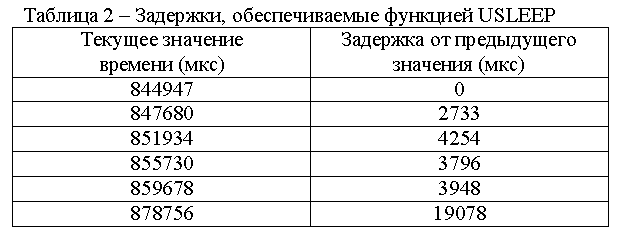
Учитывая, что задержка была установлена на 1 мкс, реальное значени задержки многократно превысило это значение, что подтверждается результатами исследования (табл. 2). При этом максимальное значение задержек превысило 4 мс (табл. 2), поэтому использование данной функции представляется невозможным для исследования. Проанализируем использование инструкции rdtsc для выполнения задержек. Поскольку инструкция возвращает значение счетчика тиков процессора, необходимо установить соответствие между временем тика и времени в микросекундах. При этом необходимо учесть задержку, вносимую самой инструкцией. Для этого была разработана программная модель исследования времени выполнения инструкции rdtsc путем последовательного вызова нескольких инструкций. Основной результат: время выполнения инструкции соответствует 181 такту CPU. Исходя из этого, в программной модели была выполнена задержка с помощью инструкции rdtsc на 182 такта и далее на последовательно увеличивающееся количество тактов с шагом 10. Повтор каждого из значений задержки выполнялся 300 раз для увеличения точности измерений. Реальное время выполнения задержек было измерено с помощью функции GETTIMEOFDAY(2) (см п.3) (рис.3).

Учитывая задержки вносимые функцией GETTIMEOFDAY, из (рис.3) можно заключить, что с помощью инструкции rdtsc обеспечиваются задержки, начиная с 2 мкс.
Исследование базовых параметров позволяет перейти к определению времени переключения контекста процессов. Эта задача исследовалась в работе [6]. При данном исследовании была рассмотрена отличная от [6] методика измерения времени переключений контекста. Время обслуживания определялось следующим образом: при остановке выполнения одного из потоков обеспечивается замер времени. При входе в функцию обработки второго потока осуществляется второй замер. Время, полученное в результате вычитания, может быть рассмотрено, как искомое время обслуживания. Данное значение времени обслуживания хранится в глобальной переменной и выводится на экран контролирующей программой при каждом переключении между потоками (рис 4).
Для определения максимального и среднего времени опыт переключения контекста потоков повторялся десять тысяч раз. Ниже приведен фрагмент, в котором было получено максимальное значение для времени обслуживания (рис. 5):
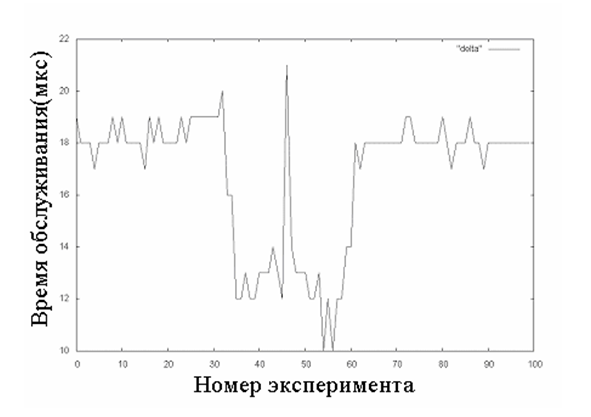
Наличие выбросов на диаграмме определяется особенностями алгоритмов синхронизации потоков, а также механизма обработки прерываний ядра операционной системы. Подобное поведение графика результатов времени переключения контекста, наблюдается для всех значений, полученных в ходе эксперимента. Усредненная по всем значением эксперимента величина времени обслуживания составляет 16.4257 мкс, а максимальная – 21 мкс. Данные полученные опытным путем сопоставимы с результатами исследований в [6], что подтверждает их достоверность.
Разработаны инструментальные программные модели для измерения временных параметров. Исследования с помощью программных моделей ОС ASPLinux позволили получить интервалы изменения исходных параметров для алгоритмов планирования расписаний. Максимальное время переключения контекста при монопольном использовании процессора равно 21 мкс. В зависимости от исходного состояния операционной системы это значение может быть уменьшено до 10 мкс. Минимально возможная программно реализуемая задержка, применимая для формирования временных интервалов, составила 2 мкс. Погрешность измерения, вносимая инструкцией RDTSC, не превышает 2 мкс. Дальнейшую оптимизацию как аппаратной (возможно многопроцессорной), так и программной модели целесообразно выполнять для конкретной задачи реального времени совместно с профилированием алгоритма решения.