УДК 53.01 : 004.94
Доклад на региональную студенческую конференцию "Физика и научно-технический прогресс" (ФиНаТ-2005)
Шевченко Л.В., старший преподаватель кафедры физики
Садыкбаев А.В.
Донецкий национальный технический университет
Моделирование физических процессов
Цель данной работы – практически проверить теоретические знания о математическом маятнике. Для этого воспользуемся построением компьютерной модели математического маятника. Фактически, мы проводим пассивный вычислительный эксперимент.
Представленная модель математического маятника создана в программном комплексе MatLab/Simulink. Модель описывает самый простой вариант математического маятника, в котором тело подвешено на нерастяжимой нити и колебания в системе незатухающие.
Прежде чем описывать математическими формулами модель маятника, нужно представить как выглядит исследуемое тело. На рисунке 1 показан исследуемый маятник .
Рис. 1
В данный
момент тело, подвешенное на нерастяжимой нити длинной ![]() , отклонено на некоторый
угол
, отклонено на некоторый
угол ![]() от
положения вертикали. Легко найти составляющие угла отклонения :
от
положения вертикали. Легко найти составляющие угла отклонения :
![]()
![]()
В
дальнейшем, при построении модели математического маятника будем использовать
вместо греческого обозначения угла ![]() сочетание
сочетание ![]() . Это связано с тем, что
при проектировании модели в системе моделирования нельзя пользоваться
греческими буквами.
. Это связано с тем, что
при проектировании модели в системе моделирования нельзя пользоваться
греческими буквами.
Для удобства, возьмём нить длиной 1 метр. Тогда:
![]()
![]()
Перед тем как приступить непосредственно к моделированию, нам нужно описать поведение математического маятника. В этом заключается основное отличие пассивного вычислительного эксперимента от активного. В данной работе мы работаем с моделью, все необходимые свойства которой уже известны заранее [4].
Опишем движение маятника. Как известно, уравнение движения математического маятника имеет вид:
![]() ,
,
где ![]() – угол
отклонения маятника от положения равновесия
– угол
отклонения маятника от положения равновесия ![]() . Но в такой форме, уравнение не
устраивает нас. Найдём из уравнения угол
. Но в такой форме, уравнение не
устраивает нас. Найдём из уравнения угол ![]() :
:
![]()
![]()
В данном уравнении мы видим зависимость изменения угла отклонения маятника с течением времени. Теперь, после того, как у нас есть уравнения, описывающие движения маятника, можно приступить к созданию программной модели. В системе моделирования Simulink, все модели строятся из блоков, которые соединяются между собой соединительными линиями [1, 2]. Готовая модель показана на рисунке 2.
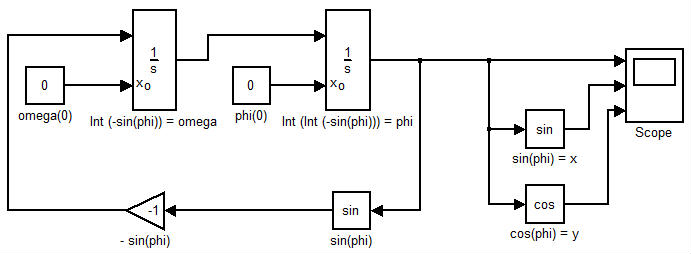
Рис. 2
Каждый блок модели подписан:
![]() – интегратор;
– интегратор;
![]() – константа «1»;
– константа «1»;
![]() – изменение знака
поступающего выражения на противоположный;
– изменение знака
поступающего выражения на противоположный;
![]() – блок тригонометрических
функций (
– блок тригонометрических
функций (![]() ,
,
![]() ,
, ![]() и т.д.);
и т.д.);
![]() – блок визуализации.
– блок визуализации.
На схеме видно, что процесс вычисления нового значения угла отклонения итеративен. Сама схема условно разделена на 2 части (см. рис. 3): часть вычисления значения угла и часть вывода результатов моделирования в качестве графика.

Рис. 3
При
получении нового значения угла ![]() , результаты поступают на блок
визуализации
, результаты поступают на блок
визуализации ![]() ,
который по полученным значениям строит графики зависимости изменения угла от
времени.
,
который по полученным значениям строит графики зависимости изменения угла от
времени.
После
сборки схемы модели, нужно запустить процесс моделирования нажатием на кнопку ![]() :
:
После
завершения процесса симуляции, результаты работы можно увидеть в блоке
визуализации ![]() (см.
рис. 4) [3].
(см.
рис. 4) [3].
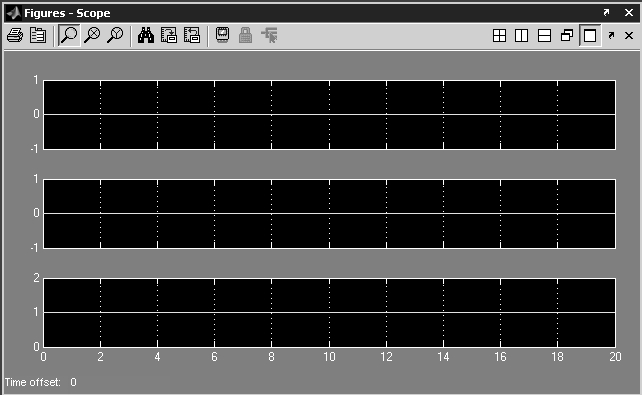
Рис. 4
Как видно
из рисунка 4, графиком колебаний математического маятника в таком случае
является прямая линия. Иными словами положение маятника на протяжении всего времени
не изменяется. В чём же дело? Если взглянуть на схему модели, то видно, что на
интеграторы подаются начальные условия ![]() (угловая скорость) и
(угловая скорость) и ![]() . Значит, нужно
сдвинуть маятник с места. Сделать это можно или задав начальную угловую
скорость отличную от нуля, или начальный угол отклонения отличный от нуля.
Выбирая между двумя способами изменения положения маятника, будем
руководствоваться принципами наглядности. И действительно, процесс отклонения и
отпускания нити с привязанным на конце грузом более нагляден, чем процесс
придания скорости телу.
. Значит, нужно
сдвинуть маятник с места. Сделать это можно или задав начальную угловую
скорость отличную от нуля, или начальный угол отклонения отличный от нуля.
Выбирая между двумя способами изменения положения маятника, будем
руководствоваться принципами наглядности. И действительно, процесс отклонения и
отпускания нити с привязанным на конце грузом более нагляден, чем процесс
придания скорости телу.
Изменим начальный угол отклонения маятника, как показано на рисунке 5.

Рис. 5
В системе Simulink углы задаются в радианах. Изменения показаны на рисунке 6.

Рис. 6
Результатом симулирования будет графики, изображённые на рисунке 7.

Рис. 7
На трёх
графиках показано изменение угла отклонения ![]() , горизонтальную составляющую
движения
, горизонтальную составляющую
движения ![]() и
вертикальную составляющую движения
и
вертикальную составляющую движения ![]() . Для отображения результатов
выбран авто масштаб.
. Для отображения результатов
выбран авто масштаб.
Однако использование специализированных сред моделирования не является единственно возможным путём моделирования поведения маятника. Для осуществления задачи, можно было воспользоваться любым языком программирования и тогда бы результаты выводились в той форме, в которой пожелал бы программист. Но такой подход сильно усложняет задачу и не позволяет сосредоточиться только на процессе моделирования.
На рисунке 8-9 изображена демонстрационная программа моделирования математического маятника в среде Macromedia Flash 6.0.
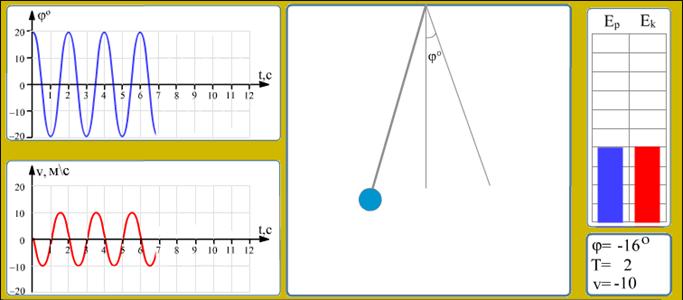
Рис. 8
Данная модель демонстрирует процесс гармонических колебаний математического маятника. Выводятся графики зависимости угла отклонения от вертикали и скорости движения от времени. В виде изменяющихся диаграмм показаны значения кинетической и потенциальной энергий. В каждый момент времени показаны значения угла отклонения и скорости. Для расчетов взяты следующие значения: длина нити-1 метр, угол первоначального отклонения - 20 градусов.
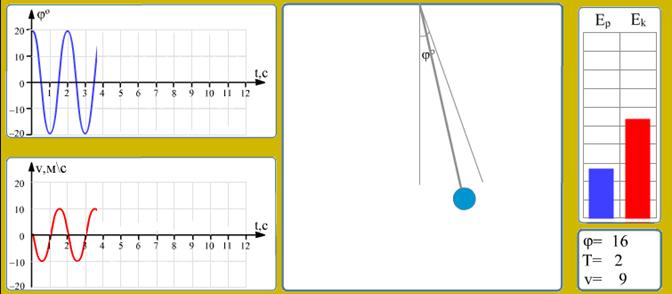
Рис. 9
Литература:
- Дж. Дэбни, Т. Харман Simulink 4. Секреты мастерства - Бином. Лаборатория знаний, - М., 2003, 403 стр.
- В. П. Дьяконов Simulink 5/6/7. Самоучитель, - ДМК пресс, - М., 2008, 784 стр.
- Г. А. Бордовский, А. С. Кондратьев, А. Д. Р. Чоудери Физические основы математического моделирования - Академия, - М., 2005, 320 стр.
- Д. В. Алексеев Компьютерное моделирование физических задач в Microsoft Visual Basic - Солон-Пресс, - М., 2004, 525 стр.
© Садыкбаев А.В., Шевченко Л.В., 2005