Введение
При выполнении измерений цифровых снимков при помощи ЭВМ
основное значение имеет уровень автоматизации применяемых методов.
Одной из важнейших задач автоматизации фотограмметрических измерений
является поиск соответственных (идентичных) точек на снимках.
Данная задача состоит в том, чтобы положение пространственной марки
на поверхности модели соответствовало положению марок на левом и правом фотоснимках
стереопары в идентичных точках.
Если рассматривать несколько снимков, то данная задача сводится к
соответствию положения измеряемой точки на всех снимках.
Существует несколько алгоритмов решения данной задачи.
Однако при выборе оптимального метода необходимо учитывать не только точность метода,
но и эффективность метода, простоту вычислений и возможность его реализации
в определенных условиях.
В качестве оптимального критерия опознавания точек для всех методов
служит коэффициент корреляции оптических плотностей участков снимков.
Актуальность темы
В настоящее время информационные технологии в значительной мере заменяют
традиционные. Так на смену традиционной фотограмметрии приходит цифровая фотограмметрия.
Цифровая фотограмметрия, в отличие от использования физических изображений на стекле,
пленке или бумаге, обрабатывает изображение в цифровой форме в компьютере.
При этом фотографическое изображение преобразовывается в цифровую форму путем
дигитализации или сканирования. Изображения также могут быть получены в цифровой форме
непосредственно со специальной камеры, установленной на различных носителях.
Основной задачей цифровой фотограмметрии является измерение снимков и
дальнейшее построение цифровой модели местности.
Измерение снимков выполняется путем указания идентичных точек снимков стереопары.
Таким образом, при выполнении измерений снимков возникает задача автоматизации поиска
идентичных точек. Следовательно, задача является актуальной.
Связь работы с научными программами, планами и темами
Специальность «Геоинформационные технологии» предполагает внедрение
информационных технологий в процесс геодезических измерений, а также обработки
результатов измерений. Одной из дисциплин кафедры геоинформатики и геодезии
является фотограмметрия. Тема магистерской работы является одной из задач цифровой
фотограмметрии. Следовательно, тему магистерской работы можно считать связанной с
научными программами, планами и темами.
Цели и задачи работы
Цель работы : анализ существующих методов распознавания идентичных
точек на снимках и выбор оптимального метода распознавания соответственных точек,
позволяющего наиболее эффективно распознавать идентичные точки на снимках.
Идея работы : усовершенствование существующей оптимальной на
сегодняшний день технологии распознавания соответственных точек на снимках и ее
дальнейшая автоматизация.
Основные задачи разработок и исследований :
1) исследовать существующие методы распознавания соответственных точек на снимках;
2) обосновать оптимальный метод распознавания идентичных точек на снимках;
3) разработать программный продукт, позволяющий реализовать автоматизацию оптимального метода.
Предметом разработок и исследований является методика распознавания соответственных точек на снимках.
Метод исследований : анализ существующих методов распознавания соответственных точек на снимках.
Объем разработок и исследований: исследованы существующие методы
распознавания соответственных точек на снимках, выполнено обоснование оптимального метода
поиска идентичных точек, программный продукт находится в стадии разработки.
Научная новизна:Получение нового программного продукта, позволяющего
эффективно распознавать идентичные точки снимков.
Практическое значение полученных результатов:
1) автоматизация оптимального метода распознавания соответственных точек на снимках;
2) сокращение трудозатрат на выполнение измерений.
Апробация работы: Результаты исследований докладывались на научной студенческой конференции 2009 года.
Обзор исследований и разработок по теме
Локальный обзор:
1) Могильный С.Г., Беликов И.Л., Ахонина Л.И., Брежнев Д.В. Фотограмметрия. - Киев.: Вища школа, 1985.-278 с.
Глобальный обзор:
1) Прэтт У. Цифровая обработка изображений / Пер. с англ. под ред. к.т.н. Лебедева Д. С. – М.:Мир, 1982. – 790 с.
2) Дуда Р., Харт П. Распознавание образов и анализ сцен / Пер. с англ. под ред. В.Л. Стефанюка. М.: Мир, 1976.
3) Ту Дж., Гонсалес Р. Принципы распознавания образов. М.: Мир, 1978.
4) Лобанов А. К., Журкин И. Г. Автоматизация фотограмметрических процессов. М.: Недра, 1980.
Национальный обзор:
1) Чопенко Е.Ф. Эргономические аспекты стереоскопических наблюдений в автоматизированных комплексах и системах. – Львов: Национальный ун-т "Львовская политехника", 2001.
2) Гнатушенко В.В. Идентификация и анализ многокомпонентных фотограмметричних изображений проекционной природы. - Мелитополь, 2002.
3) Иванова Л.И., Егоров О.И. Основы фотограмметрии - Киев. КНУБА.-2002.-155 с.
Основное содержание работы
Цифровым снимком местности называется уменьшенное изображение местности,
представленное в цифровом виде, то есть записанное на машинном носителе информации.
Цифровые снимки, применяемые в фотограмметрии, отличаются тем, что на них существуют
изображения точек с известными координатами или так называемых опорных точек.
Задача распознавания идентичных точек заключается в установлении идентичного положения
марок в опорных точках на измеряемых снимках [2].
Рисунок 1 – Поиск соответственных точек на снимках
(6 кадров, интервал между кадрами 100 мс, число циклов повторения 7, объем 95 кБ)
В зависимости от алгоритма опознавания соответственных точек различают
следующие методы решения данной задачи:
1. Аналитический метод поиска соответственных точек на снимках.
Данный метод представляет собой математическую модель решения данной задачи с
использованием зависимости координат точки на снимке и координат точки на местности.
Недостатком метода является необходимость знания элементов ориентирования снимков.[5]
2. Метод оценки контрастов. Основан на замене корреляционных функций релейными и
полярными корреляционными функциями. При этом выполняется замена исходного сигнала
клиппированным сигналом, то есть знакопеременным сигналом постоянной амплитуды.
Достоинством метода является использование различных критериев поиска идентичных точек
для различных видов контуров опорных точек. Недостатком метода является появление
методической ошибки, вызванной низкой степенью подобия исходного и замененного сигналов.[8]
3. Метод оценки образов точек. В основе данного метода лежит понятие образа,
то есть элементарного участка снимка. Алгоритм направлен на поиск параметров,
удовлетворяющих критерию идентичности, совокупность которых называется алфавитом образов.
Достоинством данного метода является возможность опознавания нескольких пар одноименных
точек одновременно. Недостатком метода является необходимость вычислений коэффициента
корреляции для всех образов, входящих в алфавит.[1]
Оптимальным методом является метод оценки образов точек поскольку
он не требует наличия информации об измеряемых снимках, такой как элементы
ориентирования снимков или виды контуров опорных точек, а также при его реализации
не возникает методической ошибки, связанной с использованием замененного сигнала.
Для реализации данного метода, цифровой снимок рассматривается в виде
совокупности оптических плотностей, соответствующих каждому пикселю снимка.
Для решения задачи снимок разбивается на заданное число участков,
называемых образами снимка.[3]
Таким образом, цифровой снимок представляет собой совокупность образов,
каждый из которых состоит из боле простых, элементарных образов, имеющих известную
оптическую плотность [4].
Далее рассматривается реализация данного метода на примере пары снимков.
При идентификации соответственных точек необходимо выбрать эталонный снимок,
то есть снимок на котором будет задаваться исходная для поиска точка.
В качестве эталонного выбран левый снимок.
Если обозначить через  оптическую плотность одного пиксела изображения,
то образ снимка можно описать следующим выражением: оптическую плотность одного пиксела изображения,
то образ снимка можно описать следующим выражением:
Для левого снимка:
 (1) (1)
И для правого снимка:
 (2) (2)
где р – размерность образа.
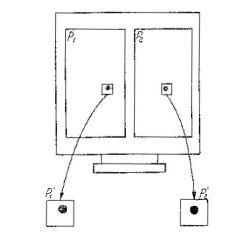
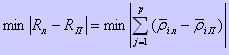
Рисунок 2 – Схема идентификации соответственных точек
Опознавание идентичных точек стереопары сводится к поиску минимального
евклидова расстояния между двумя векторами Rл и Rп, характеризующими соответственно
образы левого и правого снимков стереопары, что можно выразить в следующем виде [9]:
 (3) (3)
Путем подстановки в выражение (3) в качестве Rл и Rп выражений (1) и (2) соотвественно,
выражение (3) приобретает вид:
 (4) (4)
Поскольку начала векторов Rл и Rп не совпадают, то необходимо привести их к одному
началу. Таким образом, выражение (4) с использованием сцентрированных значений этих
векторов и в результате некоторых преобразований приобретет вид [7]:
 (5) (5)
где  - средние значения оптических плотностей точек сответственно для левого и правого образов
снимков, вычисляемые по формуле:
- средние значения оптических плотностей точек сответственно для левого и правого образов
снимков, вычисляемые по формуле:
 (6) (6)
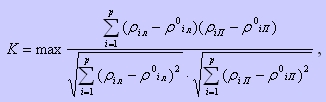
На основании формулы (5) вычисляются все коэффициентыкорреляции, соответствующие
каждому образу правого снимка. Тот образ, которому соответствеут максимальное значение
из всех вычисленных коэффициентов корреляции, является идентичным эталонному.
Упрощение данной задачи выполняется путем формирования алфавита образов,
состоящего из параметров образа, при которых коэффициент корреляции максимален [6].
Общее число образов, для которых вычисляются коэффициенты корреляции вычисляется по формуле:
 (7) (7)
где  — алфавит образов, составленный из точек строки правого снимка;
— алфавит образов, составленный из точек строки правого снимка;
 — сдвиги опознаваемого изображения;
— сдвиги опознаваемого изображения;
 — число строк, входящих в образ на правом снимке.
— число строк, входящих в образ на правом снимке.
Количество образов в алфавите определяется числом разбиений области
правого снимка и вычисляется следующим образом:
 (8) (8)
где  — максимальное число элементов, из которого может состоять элементарный образ правого снимка;
— максимальное число элементов, из которого может состоять элементарный образ правого снимка;
р — размерность образа.
Параметры и
в первую очередь зависят от рельефа местности, изображенного на снимках и могут быть вычислены
по формуле [10]:
 (9) (9)
где  — угол поля зрения изображения вдоль линии;
— угол поля зрения изображения вдоль линии;
 — угол, характеризующий приращение высот между двумя точками местности, определяемый по формуле:
— угол, характеризующий приращение высот между двумя точками местности, определяемый по формуле:
 (10) (10)
где  — приращение координат вдоль оси X между двумя точками местности; — приращение координат вдоль оси X между двумя точками местности;
f — фокусное расстояние камеры.
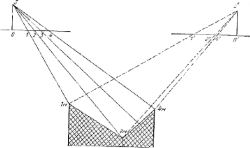
Рисунок 3 – Зависимость положения точки на снимке от рельефа местности
Таким образом, скорость опознавания идентичных точек зависит от числа образов,
входящих в алфавит n. Следовательно, чем меньше n, тем меньше затраты впремени на
идентификацию.
Данный алгоритм является наиболее распространенным и на его основе разработаны
следующие методы:
1) в зависимости от числа образов, входящих в алфавит:
а) сдвиговые - число образов, входящих в алфавит, является линейной
функцией от числа сдвигов, необходимых для поиска первого образа;
б) кодовые – число образов в алфавите равно общему числу образов,
сопоставляемых в процессе идентификации;
в) кодо-сдвиговые – число образов, входящих в алфавит, определяется
как функция от общего числа образов и числа сдвигов.
2) в зависимости от типа области поиска точек:
а) строчные – поиск соответствующих точек осуществляется вдоль
только одной заданной стороны каждого из снимков стереопары;
б) площадной алгоритм – поиск соответствующих точек выполняется по элементарным участкам,
содержащим несколько строк снимков стереопары;
в) синтез площадного и строчного методов.
Выводы
Основной проблемой при решении задачи распознавания соответственных точек является то,
что при поиске соответственных точек для одной точки эталонного снимка имеется целый ряд
точек на других снимках, которые имеют примерно равные коэффициенты корреляции.
При этом наибольший коэффициент корреляции может приходиться на образ, не являющийся
идентичным образу на эталонном снимке, что значительно понижает точность всего метода.
Также одной из проблем является большое количество времени, затрачиваемое на
вычисление коэффициента корреляции для всех образов на других снимках.
Особенно данная проблема актуальна при поиске точек для нескольких пар снимков.
Основными источниками возникновения данных проблем являются:
1) критерий, выбранный для опознавания идентичных точек;
2) параметры математической модели опознавания;
3) шаг дискретизации фотоизображения по осям снимка;
4) точность вычисления коэффициента корреляции оптических плотностей;
5) наличие различного вида шумов;
6) характер местности, изображенной на снимке.
Наиболее распространенными являются методы поиска соответственных точек,
опирающиеся на вычисление коэффициента корреляции образов снимков.
Данные методы являются достаточно трудоемкими, поскольку требуют вычисления
большого числа коэффициентов корреляции. Упростить данную задачу позволяет более
точное задание области поиска точек на поисковом снимке. Уточнение реализуется путем
задания области перекрытия снимков или аналитического задания рельефа, изображенного на
снимках. В данном случае методы становятся более эффективными и легко реализуемыми.
При написании данного автореферата магистерская работа еще не завершена.
Окончательное завершение - декабрь 2009 г. Полный текст работы и материалы по теме
могут быть получены у автора или его руководителя после указанной даты.
Список используемой литературы:
1. Лобанов А.К., Журкин И.Г. Автоматизация фотограмметрических процессов. М.: Недра, 1980.
2. Могильный С.Г., Беликов И.Л., Ахонина Л.И., Брежнев Д.В. Фотограмметрия. - Киев.: Вища школа, 1985.-278 с.
3. Прэтт У. Цифровая обработка изображений / Пер. с англ. под ред. к.т.н. Лебедева Д. С. – М.:Мир, 1982. – 790 с.
4. Михайлов А.П. Макетные стереопары цифровых снимков для тестирования систем автоматической идентификации соответственных точек [Электронный ресурс] / Геоиформационный портал ГИС-ассоциации, - http://www.gisa.ru/3810.html .
5. Дмитриев В.Г., Сюняев Ш.И. Аналитическое задание областей автоматического поиска соответственных точек на снимках // Известия ВУЗов. Геодезия и аэрофотосъемка. – 1990. - № 2. С. 104-113.
6. Дунаев А.А., Лобив И.В., Мурзин Ф.А., Половинко О.Н. Алгоритмы быстрого поиска фрагментов фотографических изображений [Электронный ресурс] / Институт систем информатики им. А.П. Ершова СО РАН, - http://www.iis.nsk.su/preprints/articles/pdf/sbor_kas_10_murzin_polovinko_lobiv.pdf
7. Быков Л.В., Ессин А.С., Макаров А.П. Исследование алгоритмов автоматической идентификации точек на паре видеоснимков. [Электронный ресурс] / Омский филиал ФКЦ «Земля». Статьи, доклады, - http://www.sibrcc.ru/info/article.php?show_art=yes&id_article=15 .
8. Акулова Л.В., Зданович В.В., Пивоваров В.Т. Автоматизация стереоизмерений на основе корреляционного анализа // Автоматизация процессов управления и обработки информации. - Львов, 1980. – С. 83-88.
9. Шароватов Г.Л., Селянинова Т.Н, Борисов Э.А. Автоматизация фотограмметрических измерений координат маркированных точек // Геодезия и фотограмметрия. – Ростов на Дону, 1984. – С. 61-66.
10. Краснов В.И. Метод автоматического определения идентичных точек стереоизображений // Известия ВУЗов. Геодезия и аэрофотосъемка. – 1981. - № 12. С. 40-46.
|

{kind=link}