Математична модель ГОН, яка була розроблена в середовищі Simulink пакету Matlab приведена на рисунку 1. НО був створений на базі елемента порівняння Relation Operator.
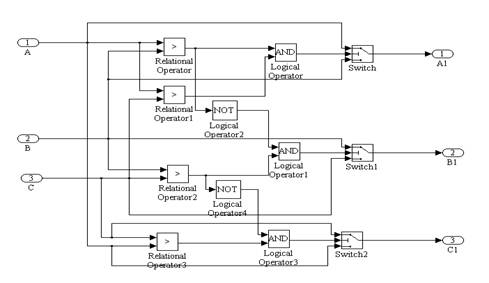
Рис.1. Математична модель ГОН
Принцип роботи цієї моделі полягає в тому, що на входи А, В і С подається живляча синусоїдальна напруга, яка порівнюється на логічних елементах, для визначення працюючої фази. На виходи А1, В1 і С1 виводиться діюча у цей час напруга, яка повністю синхронізована з сіттю.
. Побудуємо ФЗП, що використовує косинусоідальну форму опорной напруги .
Для цього требо використати наступний алгоритм – ключ К фіксує полярність напруги мережі і при позитивній напівхвилі на вхід інтегратора з коефіцієнтом підсилення
 (2).
(2). Склавши одержану напругу
Далі відбувається порівняння опорної uоп і керуючої uк напруг, і у момент рівності виробляється керуючий імпульс
Модель багатоканальної ФЗП сумісно з ГОН, відповідно до наведеного вище алгоритму роботи, (рис. 2.)
Діаграми роботи побудованої модели ФЗП наведені на рисунку 3.

Рис.2. Модель багатоканальної ФЗП
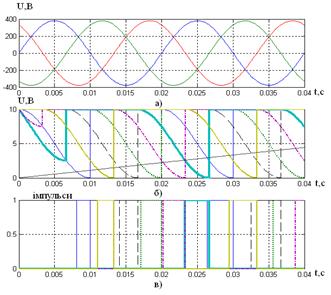
Рис.3. Діаграми роботи побудованої модели ФЗ
Висновки.
1. Була розроблена математична модель багатоканальної ФЗП.
2.Діаграми роботи розробленої моделі свідчить, що ця модель реалізує, принцип вертикального керування, і тим самим вона задовольняє вимогам які ставляться перед СІФК
Перелік посилань: