Руководство пользователя привода Mentor II (3 раздел)
Перевод: Криволапов П.П.
Источник: Part Number: 0410-0013-13 Issue Number: 13 Control Techniques Drives Ltd
3 Введение
Приводы Mentor II являются новейшим семейством промышленных Приводов постоянного тока с изменяемой скоростью с полностью микропроцессорным управлением. Выходной ток лежит в диапазоне от 25 А до 1850 А. Устройства всех номиналов обладают функцией распределенного управления, мониторинга, защиты и последовательной коммуникации.
Все устройства выпускаются в одно- или четырехквадрантной конфигурации. Одноквадрантные приводы обеспечивают только вращение вперед. Четырехквадрант-ные приводы могут работать в обоих направлениях. Приводы обоих типов имеют усовершенствованное управление скоростью вращения двигателя и/или крутящим моментом, причем четырехквадрантные приводы при этом обеспечивают полное управление при обоих направлениях вращения. Выбор и изменение рабочих параметров выполняется либо с встроенной панели управления, либо по линии последовательной связи (через соответст-вующий интерфейс). Доступ к записи и изменению значений параметров может быть защищен трехуровневым кодом.
3.1 Управление двигателями постоянного тока
На практике необходимо управлять следующими функциями двигателя постоянного тока: скоростью, крутящим моментом и направлением вращения. Скорость пропорциональна обратной электродвижущей силе якоря и обратно пропорциональна магнитному потоку. Крутящий момент пропорционален току якоря и магнитному потоку. Направление вращения зависит только от соответствия полярностей напряжения на якоре и напряжения на обмотке возбуждения. Следовательно, необходимо управлять:
1 Напряжением на якоре; обратная электродвижущая сила является составляющей напряжения якоря. Таким образом, полагая, что поле постоянно, управление напряжением якоря обеспечивает полное управление скоростью вплоть до точки, в которой напряжение достигнет максимального значения, на которое рассчитан якорь. Ток якоря также является функцией напряжения на якоре, поэтому в диапазоне скоростей до скорости, соответствующей максимальному напряжению, крутящий момент также управляется напряжением. При наличии полного возбуждения максимальный крутящий момент обычно обеспечивается от нулевой скорости до максимального напряжения якоря (номинальная скорость).
2 Напряжением на обмотке возбуждения; позволяет определить ток возбуждения и, следовательно, электродвижущую силу магнитного поля. Если напряжение на обмотке возбуждения может изменяться независимо от напряжения на якоре, скорость может увеличиваться при полной мощности (макс. напряжении якоря) за пределами точки, в которой прикладываемое напряжение и ток якоря максимальны, так как крутящий момент прямо пропорционален электродвижущей силе поля. Максимальный крутящий момент снижается, если скорость увеличивается путем ослабления поля.
Поэтому, по существу, приводы постоянного тока с изменяемой скоростью обеспечивают управление.напряжением, прикладываемым к якорю двигателя, а значит и током, подаваемыми к электродвигателю. Если требуются скорости выше номинальной, привод может оборудоваться средствами управления полем. Для обеспечения управления скоростью и крутящим моментом в расширенном диапазоне для более сложных случаев использования электродвигателя, также может использоваться отдельное управление полем в пределах рабочего диапазона вплоть до номинальной скорости. Если имеется соответствующая обратная связь, становится возможным управление положением.
3.2 Принципы работы привода с изменяющейся скоростью
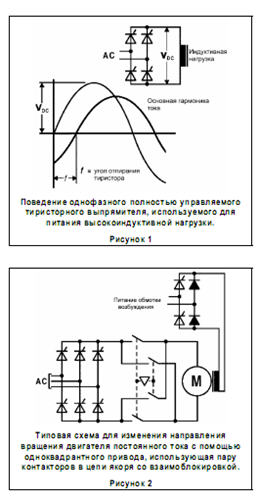
Однофазное напряжение, прикладываемое к полностью управляемой тиристорной мостовой схеме и резистивной нагрузке, создает пульсирующий ток, который начинает протекать при отпирании тиристора и прекращается при прохождении напряжения питания через ноль в конце каждого полупериода.. Максимальное напряжение обеспечивается, когда угол отпирания f на рисунке 1 станет равным нулю. Увеличение угла отпирания приводит к уменьшению значения тока на выходе. При работе с индуктивной нагрузкой, например, двигателем, или при достаточно большом угле отпирания ток становится непрерывным. Характерное запаздывание тока относительно напряжения обусловлено частично индуктивной природой нагрузки, частично задержкой угла отпирания.
3.3 Изменение направления вращения
Изменение направления вращения выполняется двумя способами, в зависимости от конфигурации мостовой схемы привода. Самой простой полностью управляемой тиристорной мостовой схемой, предназначенной для работы от 3-фазного источника питания переменного тока, является двухполупериодная схема. Однако, такая схема выпрямительного моста не позволяет изменять полярность на выходе. Для такого типа, называемого одноквадрантным или одноконцевым, для изменения направления вращения требуется обеспечение возможности внешней коммутации клемм двигателя, как показано на рисунке 2. Для некоторых применений данная простая система является хорошим, практичным решением.
Если, однако, применение двигателя таково, что требуется осуществление полного управления его работой в обоих направлениях с возможностью быстрого и частого изменения направления крутящего момента, необходимо использовать два встречно- параллельных моста (см. рис. 3). Такая конфигурация обеспечивает полное управление как при прямом, так и обратном направлении вращения привода, а также торможение в обратном направлении без необходимости изменения полярности подключения контакторов. Данная конфигурация называется четырехквадрантной, см. рисунок 4.
Если требуется торможение при работе с одноквадрантным приводом, необходимо использоват внешнюю схему, рисунок 5 (динамическое торможение). В этом случае замедление не будет ни управляемым, ни линейным.
 |