Diagnostic des defauts des machines asynchrones par reconnaissance des formes
Auteur: Grenier D., Labrique F., Buyse H., Matagne E.
L'Université de Donetsk Nationale Technique
Source: Electromécanique . Convertiseurs d’énergie et actionneurs . /D.Grenier , F.Labrique, H.Buyse, E. Matagne -Dunod, Paris. – 307.
Introduction
1 Synthèse des méthodes de diagnostic de la machine asynchrone
1.1 Introduction
1.2 Méthodes de diagnostic avec connaissance a priori
1.2.1 Principe
Introduction
Les machines asynchrones,de par leur robustesse et leur rapport puissance, sont largement utilisées en milieu industriel.Assurer leur continuité de fonctionnement nécessite la mise en place de programmes de maintenances préventive et corrective. En effet, la fiabilité et la sùreté de leur fonctionnement permettent en partie d'assurer la sécurité des personnes, la qualité du service et la rentabilité des installations.
Malheureusement, les contraintes nouvelles et l'intégration de ces machines dans systèmes de conversion d'énergie de plus en plus complexes rendent le diagnostic plus difficile.
Il existe plusieurs procédures de diagnostic. Le choix d'une approche est lié à la connaissance que l'on souhaite acquérir sur système, mais aussi à la complexité de ce système. Ainsi deux grandes familles de procédures sont utilisées dans le domaine du diagnostic en génie électrique: les méthodes de diagnostic à base de modèles analytiques et les méthodes sans modèle.
Les méthodes à base de modèles analytiques reposent sur le suivi des paramètres et des grandeurs de la machine, au moyen d'algorithmes d'observation. Elles détectent les défaillances en comparant l'évolution de l'écart entre le modèle et le processus réel. Le principal avantage de ces méthodes réside dans l'intégration d'une connaissance a priori du système et donc un filtrage de l'information.
Les méthodes sans modèle sont basées sur l'extraction d'informations par le biais du traitement des signaux mesurés. Les signaux mesurable ( les émissions) peuvent fournir des informations significatives sur les défauts. A partir de ces grandeurs caractéristiques du fonctionnement des machines électriques, la mise en oeuvre de méthodes décisionnelles (à base de reconnaissance des formes) permet de concevoir des systèmes de surveillance ou des algorithmes performants au service du diagnostic. Les performances de ces méthodes sont étroitement liées à la pertinence des indicateurs de défauts retenus et à la finesse d'analyse des mesures.
Les travaux présentés dans ce mémoire portent sur le diagnostic d'une machine asynchrone en utilisant des méthodes de reconnaissance des formes (RDF) :
• Au niveau de l'application, l'étude est cadrée sur la détection de défauts électriques créés au rotor et au stator de la machine asynchrone. La machine est alimentée soit à partir du réseau, soit par le biais d'un onduleur de tension. Afin de ne pas « trop instrumenter» le processus à surveiller (ajout d'accéléromètres, de spires de flux...), les capteurs à utiliser sont ceux classiquement nécessaires à la commande électrique de la machine, à savoir les capteurs de courants et tensions.
• Au niveau de la méthodologie de diagnostic, ce travail s'inscrit dans le cadre des méthodes sans modèle, autrement qualifiées de "méthodes sans connaissance a priori". L'objectif de la RDF est de classer des formes mesurées en les comparant à des formes types. Une forme est une observation réalisée sur le processus, c'est à dire l'ensemble des d mesures effectuées à un instant donné. Une telle forme, qu'on appelle aussi échantillon, est représentée par un point dans un espace multidimensionnel de d paramètres. Les formes types sont en réalité des ensembles de points occupant des zones géométriques de l'espace de représentation appelées classes, où sont regroupées des formes semblables. En terme de diagnostic, les classes correspondent aux modes de fonctionnement connus et le fait de classer une nouvelle observation revient à identifier un de ces modes. Cela sous-entend que, non seulement un système de RDF possède dans sa base de données un ensemble d'apprentissage, mais qu'en plus, il est capable de prendre une décision pour toute nouvelle observation.
1. Synthèse des méthodes de diagnostic de la machine asynchrone
1.1 Introduction
De nombreuses défaillances peuvent apparaître sur les machines asynchrones. Elles peuvent être électriques, mécaniques ou magnétiques. Leurs causes, très variées, sont ciassées en trois groupes [O'DonnelL 85] :
-
les initiateurs de défauts : surchauffe du moteur, usures des éléments mécaniques (roulements à billes), rupture de fixations, problème d'isolation électrique, surtension transitoire...
-
les contributeurs aux défauts ; surcharge fréquente, température ambiante élevée, ventilation défaillante, humidité, fortes vibrations, vieillissement...
-
les défauts sous jacents et erreurs humaines : défauts de fabrication, composants défectueux, protections inadaptées, absence de maintenance...
Ces différentes causes peuvent provoquer une dégradation des performances ou des arrêts intempestifs du système. Le diagnostic précoce des pannes est donc nécessaire.
De nombreuses méthodes ont été mises au point. La plupart sont basées sur une analyse vibratoire. Nous nous intéressons essentiellement à celles basées sur tes signaux électriques.
Le but de ce chapitre est de présenter un état de l'art des méthodes de diagnostic appliquées à la machine asynchrone. Ces méthodes sont classées en deux catégories, celles qui utilisent un modèle mathématique du système et celles qui consistent à analyser les signaux mesurés. Nous ferons une synthèse des champs d'application de ces méthodes.
1.2 Méthodes de diagnostic avec connaissance a priori
1.2.1 Principe
Ces méthodes de diagnostic sont généralement employées à partir d'une modélisation physique de la machine. Elles comparent l'évolution du modèle avec celle du processus physique. Considérons la machine asynchrone comme un processus expérimental dont il est question de rechercher, à chaque instant ou période d'échantillonnage, le modèle comportemental correspondant. La figure !. 1 traduit cette procédure.
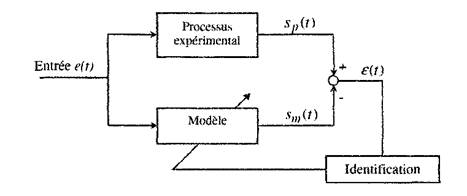
Figure 1.1 - Principe du diagnostic par modèle
On part d'un modèle du processus à surveiller sain. Si la sortie du modèle sm(t) correspond à la
sortie du processus s„(f), alors le modèle fournit une estimation des grandeurs caractéristiques du fonctionnement sans défaut. La détection de défaillance est réalisée par le suivi de l'erreur de sortie €(t) (méthode des résidus) ou par la mise en évidence d'un écart entre le modèle (qui s'éloigne alors de la physique du phénomène) et le processus réel.
Dans le second cas, l'erreur de sortie peut être minimisée en modifiant les paramètres structuraux du modèle. De cette manière les paramètres inhérents au système sont identifiés et suivis même en cas de défaillance. Le modèle adapté donne alors une signature du mode de fonctionnement.
Литература
- Electromécanique . Convertiseurs d’énergie et actionneurs . /D.Grenier , F.Labrique, H.Buyse, E. Matagne -Dunod, Paris. – 307.