Донецький Національний Технічний Університет |

Метеленко
Аліна
Володимирівна
Факультет електротехнічний
Кафедра: Електромеханічні системи автоматизації та електропривод
Спеціальність: Електромеханічні системи автоматизації та електропривод
Тема випускної роботи: Дослідження алгоритмів непрямого регулювання швидкості двигунів змінного струму
Науковий керівник: доц., к.т.н.Чекавський Гліб Станіславович
Матеріали выпускної роботи:
<>Автобіографія <>
Реферат:
Актуальність
В даний час все більше поширення на практиці набувають електроприводи на базі двигунів змінного струму, перш
за все - асинхронні двигуни (АД) і синхронні двигуни з постійними магнітами на роторі (СДПМ). Залежно від конкретних умов до системи
електропривода (ЕП) можуть пред'являтися вимоги по відсутності механічних датчиків на валу двигуна. При цьому зазвичай виникає завдання
узгодження вимог по точності системи та динамічних властивостей до вимог конкретного технологічного процесу.
Мета:
Дослідити алгоритми непрямого регулювання
швидкості двигунів змінного струму.
Вступ:
Під непрямим регулюванням швидкості розуміється досягнення
заданих показників точності регулювання швидкості без безпосереднього її вимірювання. Залежно від вимог, що пред'являються до
статичних і динамічним характеристикам системи, можливе застосування як скалярного, так і векторного принципу управління. При
скалярному управлінні завдання забезпечення необхідної точності може вирішуватися без використання датчика швидкості досить
просто (компенсація статізма, поліпшення закону керування) з досягненням діапазону регулювання швидкості до 10:1, але при цьому
динамічні властивості системи спеціально не контролюються. Більш цікавою є завдання непрямого регулювання швидкості в системах
векторного керування, коли слід забезпечити якість як статичних характеристик, так і перехідних процесів. Діапазон регулювання
швидкості при цьому практично не перевищує 50:1.
Дослідження точності ідентифікаторів швидкості
Існуючі методи ідентифікації швидкості ділять на 5 груп [1]:
• неадаптівние методи (швидкість розраховується через доступні для вимірювання координати,
наприклад, струм і напруга) ;
• адаптивні методи (за допомогою замкнутих спостерігачів) ;
• методи, засновані на конструктивних особливостях двигунів;
• нелінійні методи, що базуються на теорії нейронних мереж;
• методи, які використовують додаткові високочастотні сигнали або іншу додаткову інформацію .
У рефераті наводяться результати
дослідження точності обчислення швидкості за допомогою математичних моделей потоку (ідентифікаторів), які будуються на підставі математичного зв'язку
напружень, ЕРС, струмів двигуна з його швидкістю. Асинхронний двигун характером протікання процесів в ньому найбільш близький до узагальненої електричної
машині, тому дослідження способів ідентифікації швидкості доцільно виконати в першу чергу на прикладі АТ.
В основі ідентифікації швидкості
лежать рівняння Парку-Горєва для електромагнітних контурів АД в нерухомій системі координат
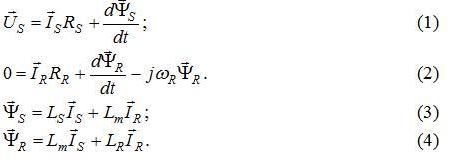
Суть непрямого
визначення швидкості зводиться в тому, що [1] електрична швидкість, що фігурує в (2), може обчислюватися на підставі інформації про
інших координатах, що входять в (1) - (4).
До числа найбільш простих
ідентифікаторів (обчислювачів) швидкості відносяться наступні:
1) За допомогою ідентифікації потокозчеплення
статора і обчислення швидкості в системі координат x, y, орієнтованої за вектором:
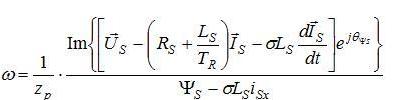
Модель ідентифікатора наведена на рис.1.
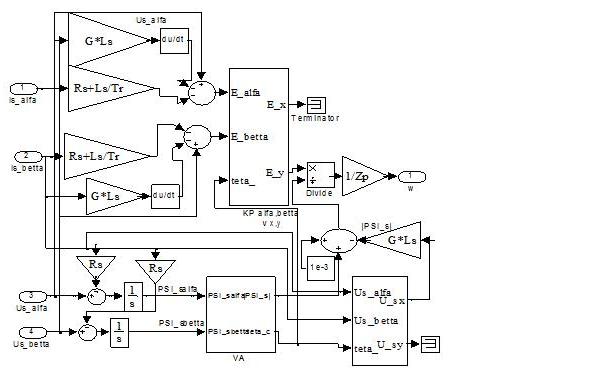
Рисунок 1 - Ідентифікатор швидкості з використанням 
2) За допомогою
ідентифікації потокозчеплення ротора і обчислення частоти ковзання з подальшим обчисленням швидкості в системі координат d, q,
орієнтованої за вектором 
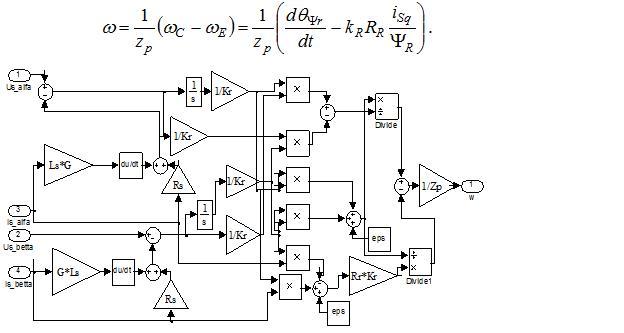
Рисунок 2 -
Ідентифікатор швидкості з обчисленням частоти ковзання
3) За допомогою ідентифікації
потокозчеплення статора та обчислення частоти ковзання з подальшим обчисленням швидкості в системі координат x, y:
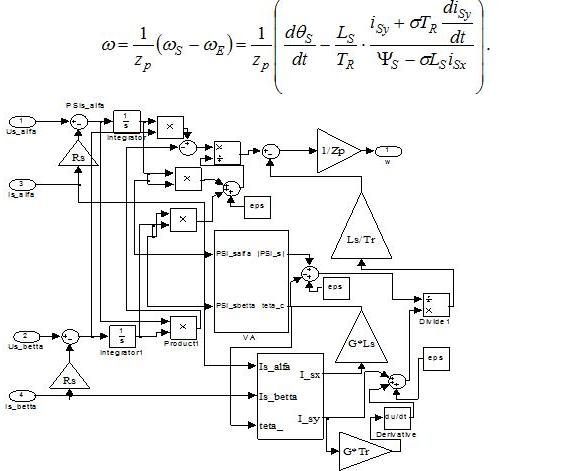
Рисунок 3 - Ідентифікатор
з використанням ідентифікатора і обчисленням частоти ковзання
Перераховані методи ідентифікації
припускають достатньо точне вимірювання фазних напруг і струмів двигуна, а також наявність необхідних коштів фільтраціі.
Точность ідентифікації, крім того, залежить від наступних факторів:
- точності використовуваного рівняння ідентифікації;
- необхідності реалізації операцій чистого інтегрування чи диференціювання;
- чутливості ідентифікаторів до зміни параметрів АД.
У середовищі програмного пакету Matlab / Simulink було виконано дослідження перерахованих ідентифікаторів на предмет точності визначення швидкості, а також
їх чутливості до зміни параметрів АД. В якості досліджуваного режиму прийнятий режим прямого пуску без навантаження з подальшим накинув навантаження на
усталеною швидкості. Зокрема, на рис.4 показані графіки перехідних процесів при повному збігу параметрів АТ та ідентифікаторів отримані в
результаті моделювання вказаного режиму роботи на прикладі двигуна МТК 011-6 (P = 1400 кВт, 380 В, 870 об / хв, 50Гц).
При написанні даного автореферату магістерська робота не завершена. Остаточний варіант роботи можна отримати
у автора або наукового керівника після грудня 2010 року.
Висновки:
Аналіз графіків показує, що
найбільш точним виявився метод ідентифікації згідно способу 3, проте слід зазначити, що він дає підвищену абсолютну похибка оцінки швидкості
в початковий період прямого пуску. Решта ідентифікатори є статичними, тобто. дають сталу помилки ідентифікації швидкості в різних режимах
работи.В результаті досліджень отримано також, що спосіб 3 дає найменшу чутливість до зміни параметрів АТ, а спосіб 1 - найбільшу.
Огляд літератури:
- Виноградов А.Б. Векторное управление электроприводами переменного тока.-Иваново, 2008., 298 с.
- Башарин А. В., Новиков В. А., Соколовский Г. Г. Управление электроприводами: Учебное пособие для вузов.— Л.: Энергоиздат. Ленингр. отд-ние, 1982. — 392 с.
- Толочко О.И. Использование пакета Matlab и его расширения Simulink при исследовании систем электропривода, Методическое пособие (для студентов специальности 7.0922.08). – Донецк: ДонГТУ, 1999. – 87 с.
- Методичний посібник до самостійної роботи з дисципліни “Моделювання електромеханічних систем” (для студентів спеціальності 7.0922.08 «Електромеханічні системи автоматизації і електропривод» очно-заочної форми навчання)., Укл.: О.І. Толочко, Г.С. Чекавський, О.В. Песковатська, П.І. Розкаряка. Донецьк: ДонНТУ, 2006. – 96 с.
- Friedland B.A. Nonlinear observer for estimating parameters in dynamic systems // Automatica. – 1997. – Vol.33 – №8. – Pp. 1525 – 1530.
- Behal A., Feemster M., Dawson D.M., and Mangal A. Partial State Feedback Control of Induction Motors with Magnetic Saturation: Elimination of Flux Measurements. Department of Electrical and Computer Engineering Riggs Hall, Clemson University Clemson, 1999.
- Казачковский, Комплектні електроприводи, - Дніпропетровськ, Обліково-видавн., 2003 - 224с.
- Виноградов А.Б., Векторное управление ЭП переменного тока, ГОУВПО "Ивановский государственный энергентический университет им.В.И. Ленина", Иваново, 2008, 298с.
- Герман-Галкин С.Г., Компьютерное моделирование в Matlab, - СПб: КОРОНА принт, 2001. - 320с.
- Соколовский Г.Г.,Электроприводы переменного тока с частотным регулированием, -265с.
Спеціальність: Електромеханічні системи автоматизації та електропривод
Тема випускної роботи: Дослідження алгоритмів непрямого регулювання швидкості двигунів змінного струму
Науковий керівник: доц., к.т.н.Чекавський Гліб Станіславович
Матеріали выпускної роботи:
<>Автобіографія <>
Реферат:
Актуальність
В даний час все більше поширення на практиці набувають електроприводи на базі двигунів змінного струму, перш
за все - асинхронні двигуни (АД) і синхронні двигуни з постійними магнітами на роторі (СДПМ). Залежно від конкретних умов до системи
електропривода (ЕП) можуть пред'являтися вимоги по відсутності механічних датчиків на валу двигуна. При цьому зазвичай виникає завдання
узгодження вимог по точності системи та динамічних властивостей до вимог конкретного технологічного процесу.
Мета:
Дослідити алгоритми непрямого регулювання
швидкості двигунів змінного струму.
Вступ:
Під непрямим регулюванням швидкості розуміється досягнення
заданих показників точності регулювання швидкості без безпосереднього її вимірювання. Залежно від вимог, що пред'являються до
статичних і динамічним характеристикам системи, можливе застосування як скалярного, так і векторного принципу управління. При
скалярному управлінні завдання забезпечення необхідної точності може вирішуватися без використання датчика швидкості досить
просто (компенсація статізма, поліпшення закону керування) з досягненням діапазону регулювання швидкості до 10:1, але при цьому
динамічні властивості системи спеціально не контролюються. Більш цікавою є завдання непрямого регулювання швидкості в системах
векторного керування, коли слід забезпечити якість як статичних характеристик, так і перехідних процесів. Діапазон регулювання
швидкості при цьому практично не перевищує 50:1.
Дослідження точності ідентифікаторів швидкості
Існуючі методи ідентифікації швидкості ділять на 5 груп [1]:
• неадаптівние методи (швидкість розраховується через доступні для вимірювання координати,
наприклад, струм і напруга) ;
• адаптивні методи (за допомогою замкнутих спостерігачів) ;
• методи, засновані на конструктивних особливостях двигунів;
• нелінійні методи, що базуються на теорії нейронних мереж;
• методи, які використовують додаткові високочастотні сигнали або іншу додаткову інформацію .
У рефераті наводяться результати
дослідження точності обчислення швидкості за допомогою математичних моделей потоку (ідентифікаторів), які будуються на підставі математичного зв'язку
напружень, ЕРС, струмів двигуна з його швидкістю. Асинхронний двигун характером протікання процесів в ньому найбільш близький до узагальненої електричної
машині, тому дослідження способів ідентифікації швидкості доцільно виконати в першу чергу на прикладі АТ.
В основі ідентифікації швидкості
лежать рівняння Парку-Горєва для електромагнітних контурів АД в нерухомій системі координат
Суть непрямого
визначення швидкості зводиться в тому, що [1] електрична швидкість, що фігурує в (2), може обчислюватися на підставі інформації про
інших координатах, що входять в (1) - (4).
До числа найбільш простих
ідентифікаторів (обчислювачів) швидкості відносяться наступні:
1) За допомогою ідентифікації потокозчеплення
статора і обчислення швидкості в системі координат x, y, орієнтованої за вектором:
Модель ідентифікатора наведена на рис.1.
Рисунок 1 - Ідентифікатор швидкості з використанням
2) За допомогою
ідентифікації потокозчеплення ротора і обчислення частоти ковзання з подальшим обчисленням швидкості в системі координат d, q,
орієнтованої за вектором
Рисунок 2 -
Ідентифікатор швидкості з обчисленням частоти ковзання
3) За допомогою ідентифікації
потокозчеплення статора та обчислення частоти ковзання з подальшим обчисленням швидкості в системі координат x, y:
Рисунок 3 - Ідентифікатор
з використанням ідентифікатора і обчисленням частоти ковзання
Перераховані методи ідентифікації
припускають достатньо точне вимірювання фазних напруг і струмів двигуна, а також наявність необхідних коштів фільтраціі.
Точность ідентифікації, крім того, залежить від наступних факторів:
- точності використовуваного рівняння ідентифікації;
- необхідності реалізації операцій чистого інтегрування чи диференціювання;
- чутливості ідентифікаторів до зміни параметрів АД.
У середовищі програмного пакету Matlab / Simulink було виконано дослідження перерахованих ідентифікаторів на предмет точності визначення швидкості, а також
їх чутливості до зміни параметрів АД. В якості досліджуваного режиму прийнятий режим прямого пуску без навантаження з подальшим накинув навантаження на
усталеною швидкості. Зокрема, на рис.4 показані графіки перехідних процесів при повному збігу параметрів АТ та ідентифікаторів отримані в
результаті моделювання вказаного режиму роботи на прикладі двигуна МТК 011-6 (P = 1400 кВт, 380 В, 870 об / хв, 50Гц).
При написанні даного автореферату магістерська робота не завершена. Остаточний варіант роботи можна отримати
у автора або наукового керівника після грудня 2010 року.
Висновки:
Аналіз графіків показує, що
найбільш точним виявився метод ідентифікації згідно способу 3, проте слід зазначити, що він дає підвищену абсолютну похибка оцінки швидкості
в початковий період прямого пуску. Решта ідентифікатори є статичними, тобто. дають сталу помилки ідентифікації швидкості в різних режимах
работи.В результаті досліджень отримано також, що спосіб 3 дає найменшу чутливість до зміни параметрів АТ, а спосіб 1 - найбільшу.
Огляд літератури:
- Виноградов А.Б. Векторное управление электроприводами переменного тока.-Иваново, 2008., 298 с.
- Башарин А. В., Новиков В. А., Соколовский Г. Г. Управление электроприводами: Учебное пособие для вузов.— Л.: Энергоиздат. Ленингр. отд-ние, 1982. — 392 с.
- Толочко О.И. Использование пакета Matlab и его расширения Simulink при исследовании систем электропривода, Методическое пособие (для студентов специальности 7.0922.08). – Донецк: ДонГТУ, 1999. – 87 с.
- Методичний посібник до самостійної роботи з дисципліни “Моделювання електромеханічних систем” (для студентів спеціальності 7.0922.08 «Електромеханічні системи автоматизації і електропривод» очно-заочної форми навчання)., Укл.: О.І. Толочко, Г.С. Чекавський, О.В. Песковатська, П.І. Розкаряка. Донецьк: ДонНТУ, 2006. – 96 с.
- Friedland B.A. Nonlinear observer for estimating parameters in dynamic systems // Automatica. – 1997. – Vol.33 – №8. – Pp. 1525 – 1530.
- Behal A., Feemster M., Dawson D.M., and Mangal A. Partial State Feedback Control of Induction Motors with Magnetic Saturation: Elimination of Flux Measurements. Department of Electrical and Computer Engineering Riggs Hall, Clemson University Clemson, 1999.
- Казачковский, Комплектні електроприводи, - Дніпропетровськ, Обліково-видавн., 2003 - 224с.
- Виноградов А.Б., Векторное управление ЭП переменного тока, ГОУВПО "Ивановский государственный энергентический университет им.В.И. Ленина", Иваново, 2008, 298с.
- Герман-Галкин С.Г., Компьютерное моделирование в Matlab, - СПб: КОРОНА принт, 2001. - 320с.
- Соколовский Г.Г.,Электроприводы переменного тока с частотным регулированием, -265с.
Тема випускної роботи: Дослідження алгоритмів непрямого регулювання швидкості двигунів змінного струму
Науковий керівник: доц., к.т.н.Чекавський Гліб Станіславович
Матеріали выпускної роботи: <>Автобіографія <>
Реферат:АктуальністьВ даний час все більше поширення на практиці набувають електроприводи на базі двигунів змінного струму, перш за все - асинхронні двигуни (АД) і синхронні двигуни з постійними магнітами на роторі (СДПМ). Залежно від конкретних умов до системи електропривода (ЕП) можуть пред'являтися вимоги по відсутності механічних датчиків на валу двигуна. При цьому зазвичай виникає завдання узгодження вимог по точності системи та динамічних властивостей до вимог конкретного технологічного процесу. Мета:Дослідити алгоритми непрямого регулювання швидкості двигунів змінного струму.Вступ:Під непрямим регулюванням швидкості розуміється досягнення заданих показників точності регулювання швидкості без безпосереднього її вимірювання. Залежно від вимог, що пред'являються до статичних і динамічним характеристикам системи, можливе застосування як скалярного, так і векторного принципу управління. При скалярному управлінні завдання забезпечення необхідної точності може вирішуватися без використання датчика швидкості досить просто (компенсація статізма, поліпшення закону керування) з досягненням діапазону регулювання швидкості до 10:1, але при цьому динамічні властивості системи спеціально не контролюються. Більш цікавою є завдання непрямого регулювання швидкості в системах векторного керування, коли слід забезпечити якість як статичних характеристик, так і перехідних процесів. Діапазон регулювання швидкості при цьому практично не перевищує 50:1. Дослідження точності ідентифікаторів швидкості
Існуючі методи ідентифікації швидкості ділять на 5 груп [1]:
• неадаптівние методи (швидкість розраховується через доступні для вимірювання координати,
наприклад, струм і напруга) ;
• адаптивні методи (за допомогою замкнутих спостерігачів) ;
• методи, засновані на конструктивних особливостях двигунів;
• нелінійні методи, що базуються на теорії нейронних мереж;
• методи, які використовують додаткові високочастотні сигнали або іншу додаткову інформацію . У рефераті наводяться результати
дослідження точності обчислення швидкості за допомогою математичних моделей потоку (ідентифікаторів), які будуються на підставі математичного зв'язку
напружень, ЕРС, струмів двигуна з його швидкістю. Асинхронний двигун характером протікання процесів в ньому найбільш близький до узагальненої електричної
машині, тому дослідження способів ідентифікації швидкості доцільно виконати в першу чергу на прикладі АТ. В основі ідентифікації швидкості
лежать рівняння Парку-Горєва для електромагнітних контурів АД в нерухомій системі координат Суть непрямого
визначення швидкості зводиться в тому, що [1] електрична швидкість, що фігурує в (2), може обчислюватися на підставі інформації про
інших координатах, що входять в (1) - (4). До числа найбільш простих
ідентифікаторів (обчислювачів) швидкості відносяться наступні:
1) За допомогою ідентифікації потокозчеплення
статора і обчислення швидкості в системі координат x, y, орієнтованої за вектором:
Модель ідентифікатора наведена на рис.1.
Рисунок 1 - Ідентифікатор швидкості з використанням 2) За допомогою
ідентифікації потокозчеплення ротора і обчислення частоти ковзання з подальшим обчисленням швидкості в системі координат d, q,
орієнтованої за вектором Рисунок 2 -
Ідентифікатор швидкості з обчисленням частоти ковзання
3) За допомогою ідентифікації
потокозчеплення статора та обчислення частоти ковзання з подальшим обчисленням швидкості в системі координат x, y: Рисунок 3 - Ідентифікатор
з використанням ідентифікатора Перераховані методи ідентифікації припускають достатньо точне вимірювання фазних напруг і струмів двигуна, а також наявність необхідних коштів фільтраціі. Точность ідентифікації, крім того, залежить від наступних факторів: - точності використовуваного рівняння ідентифікації; - необхідності реалізації операцій чистого інтегрування чи диференціювання; - чутливості ідентифікаторів до зміни параметрів АД. У середовищі програмного пакету Matlab / Simulink було виконано дослідження перерахованих ідентифікаторів на предмет точності визначення швидкості, а також їх чутливості до зміни параметрів АД. В якості досліджуваного режиму прийнятий режим прямого пуску без навантаження з подальшим накинув навантаження на усталеною швидкості. Зокрема, на рис.4 показані графіки перехідних процесів при повному збігу параметрів АТ та ідентифікаторів отримані в результаті моделювання вказаного режиму роботи на прикладі двигуна МТК 011-6 (P = 1400 кВт, 380 В, 870 об / хв, 50Гц). При написанні даного автореферату магістерська робота не завершена. Остаточний варіант роботи можна отримати у автора або наукового керівника після грудня 2010 року. Висновки:Аналіз графіків показує, що найбільш точним виявився метод ідентифікації згідно способу 3, проте слід зазначити, що він дає підвищену абсолютну похибка оцінки швидкості в початковий період прямого пуску. Решта ідентифікатори є статичними, тобто. дають сталу помилки ідентифікації швидкості в різних режимах работи.В результаті досліджень отримано також, що спосіб 3 дає найменшу чутливість до зміни параметрів АТ, а спосіб 1 - найбільшу. Огляд літератури:
|