Источник:http://www.motor-remont.ru/books/book47/book47p39.htm
Предварительные замечания.В практике эксплуатации синхронных машин бывают случаи, когда отдельные машины выпадают из синхронизма и их роторы начинают вращаться относительно поля якоря (статора) асинхронно, с некоторым скольжением s. Это случается вследствие перегрузки машин, значительного падения напряжения в сети и потери возбуждения в результате каких-либо неисправностей в системе возбуждения или ошибочного срабатывания автомата гашения поля. Хотя невозбужденная явно-полюсная машина может развивать в синхронном режиме определенную мощность за счет реактивного момента, обычно эта мощность является недостаточной для покрытия нагрузки, и поэтому явнополюсные машины при потере возбуждения чаще всего также выпадают из синхронизма.
При выпадении из синхронизма синхронная машина ведет себя подобно асинхронной, но ввиду различия конструкции ротора и наличия в общем случае тока возбуждения асинхронный режим синхронной машины имеет ряд особенностей.
Так как выпадение синхронных машин из синхронизма при авариях в энергосистемах происходит нередко, то выявление особенностей асинхронного режима и выяснение рациональных способов восстановления нормальных режимов работы имеют существенное практическое значение.
Широко применяется асинхронный пуск синхронных двигателей и компенсаторов, когда невозбужденная машина приключается к сети и ее скорость достигает почти синхронной скорости подобно асинхронному двигателю.
Асинхронные режимы работы невозбужденной и возбужденной синхронной машины существенным образом отличаются друг от друга. Асинхронный режим возбужденной синхронной машины является более сложным, и его можно рассматривать как наложение асинхронного режима невозбужденной асинхронной машины и режима установившегося короткого замыкания синхронного генератора.
Рассмотрим в первую очередь установившийся асинхронный режим работы невозбужденной синхронной машины.
Схемы замещения и их параметры. Если бы ротор синхронной машины обладал магнитной и электрической симметрией, то работа этой машины в асинхронном режиме без возбуждения ничем не отличалась бы от работы нормальной асинхронной машины. Однако в общем случае такой симметрии нет, и поэтому требуется самостоятельное рассмотрение вопроса.
Пусть обмотка статора (якоря) трехфазной синхронной машины включена в сеть. Токи якоря при этом создают вращающееся поле, перемещающееся относительно несимметричного ротора со скоростью скольжения. Для анализа явлений при несимметричном роторе разложим вращающееся относительно него поле на два пульсирующих поля (см. § 22-2), одно из которых действует по продольной (d), а другое — по поперечной (q) оси ротора. Эти поля пульсируют со сдвигом по фазе на 90°, и частота их пульсации f2 = sft. Кроме того, как и у асинхронной машины (см. § 24-2), рабочий процесс синхронной машины в асинхронном режиме можно привести к эквивалентному процессу при неподвижном роторе. Далее можно представить себе, что у такой машины с неподвижным ротором на статоре вместо трехфазной обмотки имеется эквивалентная двухфазная обмотка, причем одна фаза этой обмотки создает магнитный поток, пульсирую-
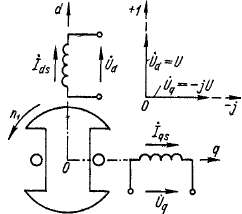
Рис. 36-1. Схема эквивалентной двухфазной синхронной машины при асинхронном режиме с заторможенным ротором
щий по продольной оси, а другая фаза — поток, пульсирующий по поперечной оси ротора (рис. 36-1), причем напряжения этих фаз U и jU сдвинуты по фазе на 90°. В подобной двухфазной системе взаимная индукция между фазами отсутствует и явления по осям d и q можно рассматривать независимо друг от друга. В результате вместо одной схемы замещения для симметричной асинхронной машины для синхронной машины получаем две схемы замещения (рис. 36-2) — одну для продольной и другую для поперечной оси.
При наличии успокоительной или пусковой обмотки (рис. 36-2, а и б) в схеме для продольной оси имеются две вторичные цепи, как и у двухклеточного асинхронного двигателя, а в схеме для поперечной оси — одна вторичная цепь. При отсутствии указанных обмоток (рис. 36-2, в и г) количество вторичных цепей уменьшается на единицу. На схемах рис. 36-2 принято га = 0 и не учитываются потери в стали статора. При наличии в цепи возбуждения добавочного сопротивления (например, сопротивления гашения поля) его величина должна включаться в rf. В основе рассмотрения явлений согласно рис. 36-1 и 36-2 лежит представление о двухфазной машине. Поэтому сопротивления схем рис. 36-2 также следовало бы считать эквивалентными сопротивлениями двухфазной машины. Однако, чтобы избежать введения в рассмотрение новых параметров, будем предполагать, что сопротивления, фигурирующие в схемах рис. 36-2, представляют собой параметры /л-фаз-ной машины, которые определены и использованы в предыдущих
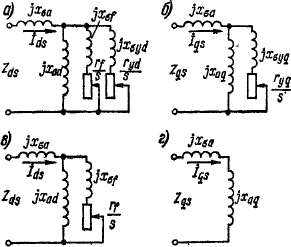
Рис. 36-2. Схемы замещения синхронной машины в асинхронном режиме при наличии (а, б) и отсутствии (в, г) успокоительной об-мртки: а, в — по продольной оси; б, г — по поперечной оси
главах. Вместе с тем будем считать также, что приложенные к двухфазной обмотке (рис. 36-1) и схемам рис. 36-2 напряжения U являются фазными напряжениями реальной m-фазной обмотки (обычно т = 3). При этом токи Ids, Iqs будут соответствовать токам /л-фазной обмотки. Например, если в определенный момент времени ось одной из фаз обмотки якоря будет совпадать с осью d,
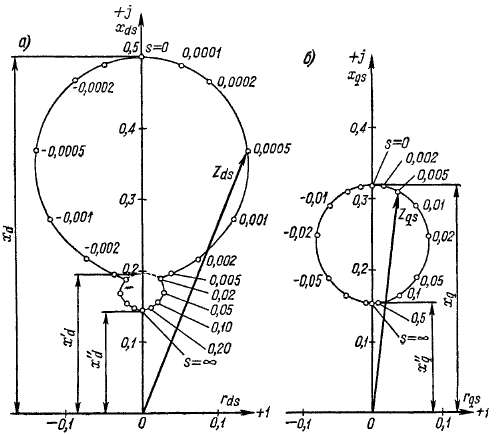
Рис. 36-3. Эквивалентные сопротивления явнополюсной синхронной машины при асинхронном режиме по продольной (а) и поперечной (б) осям
то в этой фазе будет протекать ток Ids. To обстоятельство, что анализ явлений на основе рис. 36-1 и 36-2 связывается с представлением о двухфазной машине, a U, I и Z соответствуют фазам /п-фазной машины, учитывается надлежащим образом ниже при вычислении моментов и мощностей.
Сопротивления синхронной машины по осям d и q в асинхронном режиме Zds, Zqs представляют собой сопротивления схем рис. 36-2 и являются функциями скольжения s.
При s 5= 1 для определения модулей сопротивлений Zds, Zqs обычно можно положить rf = ryd = ryq = 0, и тогда вместо схем
рис. 36-2 получим схемы рис. 34-9. Следовательно, при s ^ 1 в случае наличия успокоительной обмотки zds « x"d, zqs m xq, а при ее отсутствии zis « x'd, ZqS ж х'д = xq. Из рис. 36-2 следует, что при s = 0 имеем zds = xd и zqs = xq. В качестве иллюстрации на рис. 36-3 для машины большой мощности, имеющей успокоительную обмотку, изображены геометрические места концов векторов комплексных сопротивлений
и указаны также значения скольжения s. Этот рисунок соответствует машине со следующими значениями параметров в относительных единицах хпа* =0,41; xaq* = 0,23, хаа* = 0,09, xafif = 0,14, xaydi): = = 0,11, д:ау„= 0,09, xd* = 0,5, /dHC = 0,20, x"ds, = 0,143, д;,,* =дг^ = ^=0,32, xqif = 0,155, r^= 0,00032, ryrfH! = 0,01;y ryqjf =0,0075. Из рис 36-3 следует, что в крупной машине уже при s = 0,1 -г- 0,2 будет zds «^ и zqs « xj.
Согласно рис. 36-3, б, конец вектора комплексного сопротивления Zqs перемещается по окружности, которая соответствует окружности тока круговой диаграммы асинхронной машины с одной вторичной цепью. Кривая на рис. 36-3, а состоит из отрезков двух окружностей, соответствующих окружностям геометрического места токов двухклеточной асинхронной машины для ббластей нормальных рабочих режимов и пуска.