Замкнутый наблюдатель напряжение – ток представлен здесь в некоторых деталях.
Формула напряжения в координатах статора
в то время как формула тока в координатах ротора равна:
Ток в координатах ротора
Поток статора обратно преобразуется в координаты статора как
Это вытекает из того, что форма напряжения имеет погрешность сопротивления статора и интегрирование смещения малой частоты.
Форма тока зависит от параметра расстройки (в результате магнитного насыщения) и погрешности положения, но она действует с нулевой скорости (частоты).
Набор двух ПИ компенсаторов проектируется из условия, чтобы форма тока преобладала над малой скоростью, в то время как форма напряжения брала верх над высокими
скоростями (рис. 11.45).
ПИ компенсатор предусмотрен для этого разграничения. Диапазон частоты для переключения предусмотрен соответствующим выбором Ki и тi,
основывающимся на данном наблюдателе полюсов w1 и w2, действительным и отрицательным
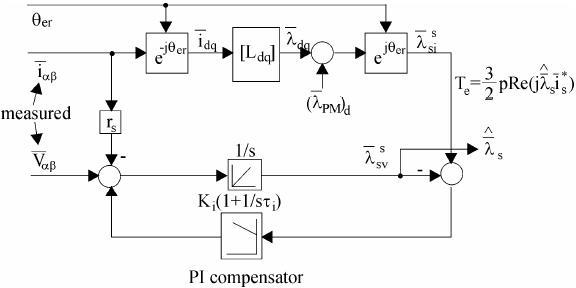
Рисунок 11.45 - Наблюдатель потока и момента статора
Типичные значения w1 и w2 равны w1= -(3-10) рад/с, w2= -(3-10)|w1| рад/с.
Момент можно вычислить через поток и ток (рис. 11.45). ПУПМ является более лёгким и более надёжным способом для обеспечения хорошей характеристики для
малой и высокой скорости, чем векторное управление напряжением и током. 
![]()
![]() равен
равен
![]()
![]()