
Actualité
А présent il y a une nécessité dans l'asservissement de la fiabilité du fonctionnement de l'équipement électromécanique, dans la vérification et la définition de son état sans réalisation de démontage, dans la pronostic d'état technique et la garantie de sécurité du fonctionnement.
Réalisation du contrôle sans le démontage est fondée sur l'application des méthodes vibroacoustiques du diagnostic, du diagnostic thermique, du diagnostic selon les paramètres électriques de la comande électrique.
Dans la direction donnée les méthodes vibroacoustiques du diagnostic ont atteint le plus grand développement.
La particularité de notre travail est l'étude de l'influence mutuelle entre le convertisseur électromécanique et la charge entrainée, et la recherche de la possibilité de trouver les indices diagnostiques parmi des grandeurs électriques et mécaniques (le courant électrique, la tension, la puissance, couple d'elasticité, vibrovitesse etc.).
L'expérience d'Ukraine et des étrangères montrent, que l'utilisation des moyens du diagnostic est économiquement justifié. On sait, qu’à temps les travaux de réparation accomplis diminuent la possibilité des accidents du travail, la quantité de refus soudains de l'équipement, que diminue correspondement le temps de l'arrêt des lignes industrielles.
But du travail
La création du stand de laboratoire de l'imitation du fonctionnement de l'installation de levage de mine sur la base de la comande électrique synchrone.
Dans les sources [1,2,3,4] on considère les questions totales de l'йlectromandat d'amener.
Les systèmes électromécaniques tipiques des installation de levage de mine examinent dans les matiéres [1,2,4].
Dans la source [3] on décrit les voitures du courant alternatif, à la base de ce livre on produisait le choix du moteur pour l'installation de laboratoire.
Dans la matière [8] on donne les descriptions des défauts les plus répandus de l'équipement - sont amenés les spéctrogrammes des vibreparamétres, observé à n'importe quelles pannes, on décrit leurs particularités distinctives.
L'auteur dans [9] examine les questions de l'amélioration et l'optimisation de l'état technique de l'équipement du moulin par voie de l'élaboration l'introduction des méthodes et les moyens de la vibrodiagnostic fonctionnele. On fait les études théoriques et expérimentales. On donne les références aux conditions de la tenue des expériences livrées. On examine les modиles de fréquence mathématiques des défauts suivants : «le déséquilibre du rotor», le défaut de la machine-outil valcée, «l'effort insuffisant du ressort protecteur» etc. On amиne les influences statistiques données du moyen de l'installation du vibrodetecteur pour les significations des paramètres divers de la vibration.
L'objet observé peut se trouver dans un des états suivants [7] :
- intact, i.e. l'état, quand l'objet observé répond à toutes les demandes par la documentation définie normative et technique;
- la capacité de travail, i.e. l'état, quand l'objet est capable d'accomplir les fonctions données dans les limites, qui sont définis par la documentation normative et technique;
- la justesse du fonctionnement, i.e. l'état, quand l'objet accomplit au moment courant du temps les algorithmes prescrits du fonctionnement (on sait seulement, que l'objet fonctionne correctement dans le mode donné au moment donné du temps);
- la situation d'accident de l'objet, quand son fonctionnement suivant n'est pas possible à la suite de la sortie de ses paramиtres pour les limites admissibles.
Parmi les pannes diagnostiquées distinguent les suivants [8] :
- les pannes "électromagnétiques";
- l'affaiblissement du pressage du paquet de l'acier;
- la rupture ou le court - circuit dans les bobinages;
- le montage incorrect mutuel des paquets du stator et le rotor;
- la rupture ou la perte du contact dans les pivots du bobinage ou короткозамыкающих les bagues court-circuités du rotor avec le carreau d'écureuil du moteur asynchrone;
- l'affaiblissement du pressage de tout le paquet de l'acier ou seulement dans la région des dents;
- le désequilibre des masses du rotor;
- l'affaiblissement mécanique;
- la touche des éléments;
- les problèmes des paliers du glissement;
- les problèmes des paliers;
- les défauts des réducteurs et les multiplicateurs;
- les défauts des manchons etc.
Synthèse du système de la gestion vectorielle du moteur synchrone аu maintien du courant id=0
Comme découle du modèle mathématique du moteur synchrone dans le système des coordonnées d,q du rotor (le schéma correspondant structural est montré sur fig. 1), un des moyens effectifs du réglage profond de la vitesse est la possibilité du maintien par le système du réglage de la signification du courant id=0, alors le moment électromagnétique du moteur synchrone dépendra seulement du courant du stator selon l'axe iq et le flux ψd. А la suite des expériences sur le modèle mathématique est établi, que le flux ψq ne change pas pratiquement dans tous les modes du mandat d'amener : à établi et de transition (la dispersion, le bloquage, le mettre et la faille de la charge) c'est proche du zéro. C'est-а-dire on peut accepter l'admission, que ψq = const ≈0. Le flux ψd n'est pas égal au zéro, elle aussi change faiblement, i.e. ψd = const ≠ 0. Ainsi, les contours du réglage se renferment seulement selon les courants, les significations} de qui sont mesurées directement. Les grandeurs des flux sont utilisées pour la compensation des liaisons croisées, ils peuvent être estimés avec l'aide des modиles mathématiques ou sont mesurés directement.
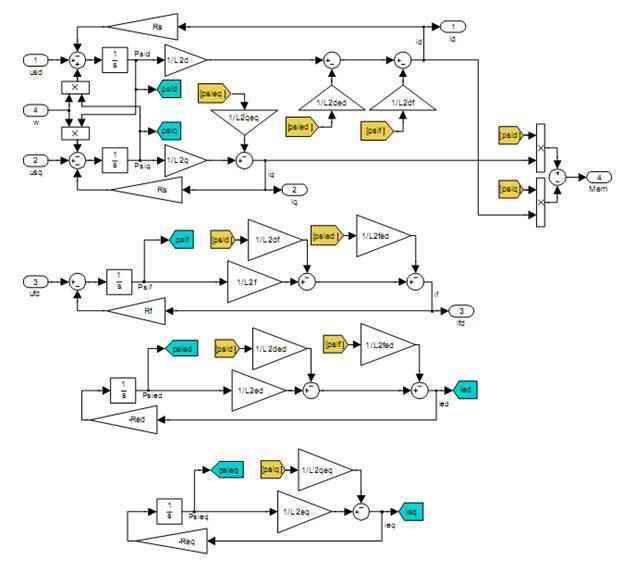
Figure 1 - Le schéma structural appliqué du moteur synchrone
On amène plus bas la synthèse des régulateurs du système du subordonné du réglage de la vitesse.
La synthèse des régulateurs du courant
Le contour du réglage du courant id est synthétisé dans la supposition, que les liaisons croisées dans l'objet du réglage de la bonne façon sont compensé. Le schéma structural du contour du réйglage du courant (CRC) est amené sur fig. 2 :
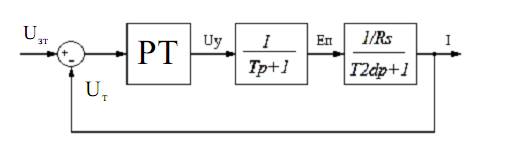
Figure 2– Le schéma structural du contour du réglage du courant id
Le contour du r2glage du courant, contient un grand T2d=x2d/Rs et un petit T constante du temps. Nous trouverons, que T = Tµ est une petite constante incompensée du temps.
L'erreur statique selon l'influence dirigeant comme la réaction au saut du système avec l’astatisme du premier ordre est égale au zéro. Pour que le système soit devenu du premier ordre astatique, nous choisirons le régulateur du courant du type en proportion - intégral (PI), en compensant une grande constante du temps T2d. La fonction de transmission choisi du régulateur PI du courant :
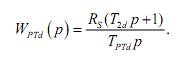
En orientant le système pour l'optimum technique, nous acceptons la constante du temps du régulateur du courant ègal à TPTd=2Tµ. On produit de la même manière la synthèse des régulateurs des courants iq et if. Leurs fonctions de transmission auront l'aspect suivant :
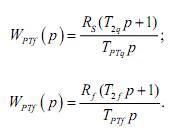
Le réglage des régulateurs des courants iq et if pour l'optimum technique : TPTd=2Tµ, TPTf=2Tµ.
La synthèse du régulateur de la vitesse
Le schéma de comptes structural du contour du réglage de la vitesse est amené sur fig. 3, qui est plus bas.
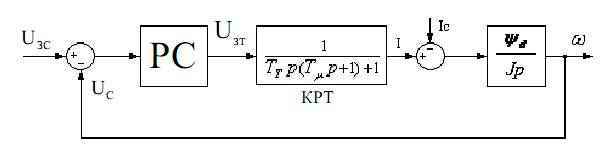
Figure 3 – Le schéma structural du contour du réglage de la vitesse
Pour la garantie d’astatisme du système de gestion selon l'influence dirigeant et selon la charge, nous acceptons le système intégrant une fois du subordonné du réglage de la vitesse, pour cela nous choisissons le régulateur de la vitesse du type PI, la fonction de transmission de qui
est reçue dans la supposition, que dans le régime établi la signification du flux ψd=const. En orientant le régulateur de la vitesse pour l'optimum symétrique, nous acceptons les significations des coefficients : a=8 , TШ = 4Tµ.
Le modelage du donné de l'intensité
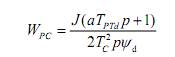
Donné de l'intensité (DI) est nécessaire à la formation de la loi désirable du changement de la grandeur réglée, mais en particulier - à la vitesse. Dans le cas examiné le donné doit, excepté la garantie du rythme donné du changement de la vitesse, avoir la possibilité de limiter la grandeur de la saccade. Le schéma structural du DI avec la restriction de la saccade est amené sur fig. 4.
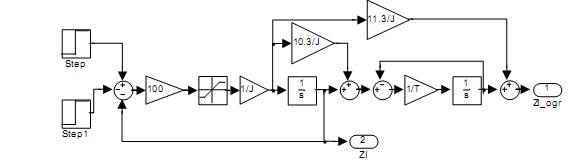
Figure 4 – Le schéma structural du donné de l'intensité avec la restriction de la saccade
Le schéma structural du système RF-MS avec le maintien id = 0 est amené sur fig. 5. Les graphiques des transitions sur fig. 6 - 15 reflиtent le changement du temps des grandeurs principales au fonctionnement du système de gestion examiné du moteur synchrone. On examine l'acquittement de travail de la tachigrame trapéssoide du mouvement avec le passage suivant à la vitesse baissée. Le jeté de la charge sur la fréquence établie de la rotation est produit pour l'estimation de la qualité des transitions à l'acquittement de travail par le système de gestion de l'aspect de l'influence. De fig. 6 on voit, que le système est astatique selon la charge. Aussi, le système de gestion est astatique selon l'influence dirigeant de l'ordre nul, l'erreur de l'acquittement de travail du devoir dans ce cas est égal au zéro et la signification établie de la fréquence de la rotation donné. En outre elle est stable, puisque dans tous les modes examinés (la dispersion, le bloquage, le jeté de la charge) n'est pas observé les apparitions des autohésitations. Comme plus tôt, à priori, était supposé, le flux Ψq ≈0 au cours de tout le cycle du travail (fig. 11), mais la grandeur du flux Ψd dans les régimes établis se tient au niveau constant, dans les régimes de transition n'est pas changé beaucoup.
Figure 5 –Le schéma structural du système RF-MS avec le maintien id=0
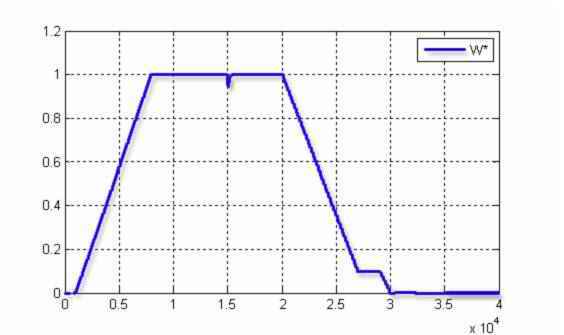
Figure 6 – Le graphique de la dépendance de la fréquence de la rotation du temps ω* (t) à l'acquittement de travail par le système RF-MS de la tachigrame trapéssoide du mouvement avec le maintien id=0
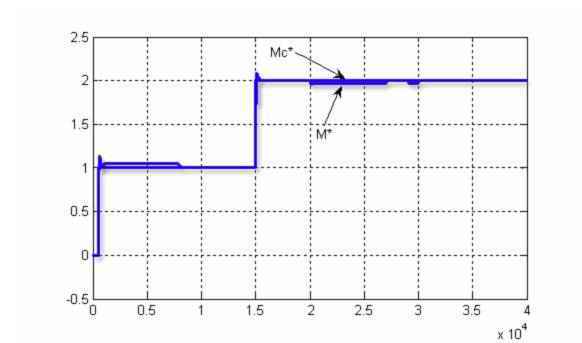
Figure 7 – Le graphique de la dépendance de la couple électromagnetique du temps M* (t) à l'acquittement de travail par le système RF-MS de la tachigrame trapéssoide du mouvement avec le maintien id=0
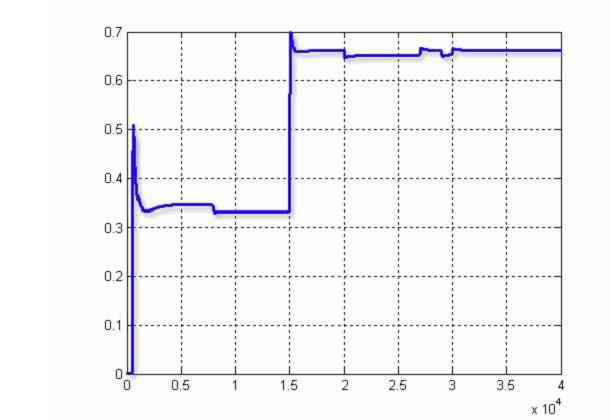
Figure 8 – Le graphique de la dépendance du courant du stator du temps is* (t) à l'acquittement de travail par le système RF-MS de la tachigrame trapéssoide du mouvement avec le maintien id=0
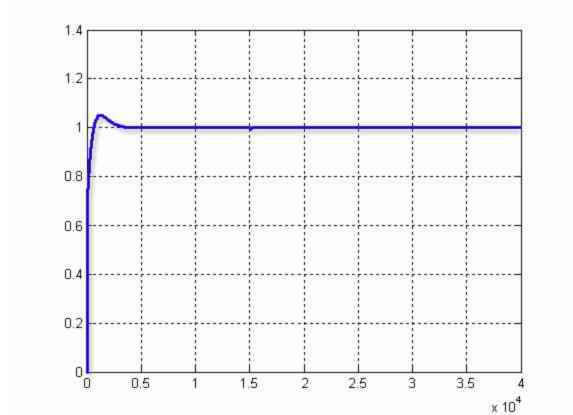
Figure 9 – Le graphique de la dépendance du courant de l'excitation du temps if*(t) à l'acquittement de travail par le système RF-MS de la tachigrame trapéssoide du mouvement avec le maintien id=0
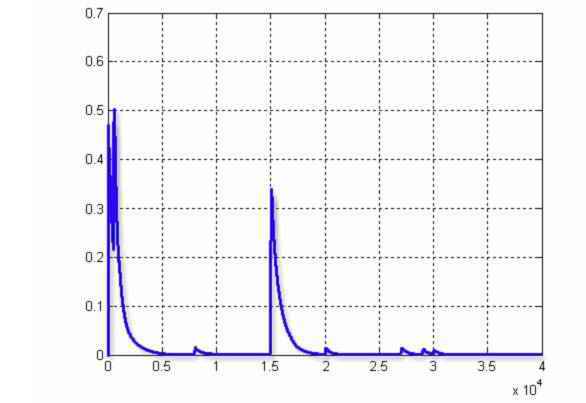
Figure 10 – Le graphique de la dépendance du courant du bobinage compensant du temps ie*(t) à l'acquittement de travail par le système RF-MS de la tachigrame trapéssoide du mouvement avec le maintien id=0
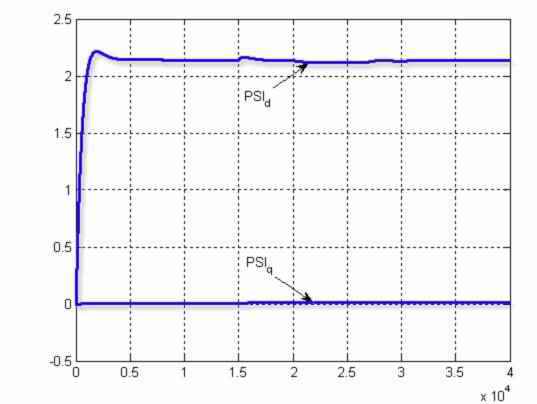
Figure 11 – Le graphique de la dépendance du flux du stator du temps Ψs*(t) à l'acquittement de travail par le système RF-MS de la tachigrame trapéssoide du mouvement avec le maintien id=0
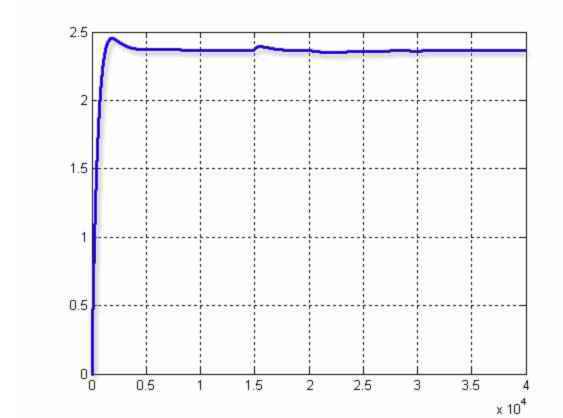
Figure 12 – Le graphique de la dépendance du flux du bobinage de l'excitation du temps Ψf*(t) à l'acquittement de travail par le système RF-MS de la tachigrame trapéssoide du mouvement avec le maintien id=0
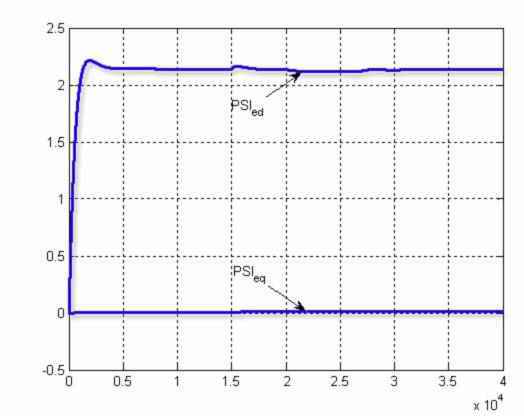
Figure 13 – Le graphique de la dépendance du flux du bobinage compensant du temps Ψe*(t) à l'acquittement de travail par le système RF-MS de la tachigrame trapéssoide du mouvement avec le maintien id=0
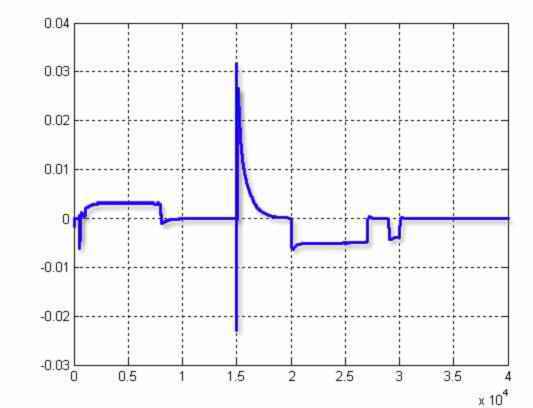
Figure 14 – Le graphique de la dépendance du courant du stator du temps id*(t) à l'acquittement de travail par le système RF-MS de la tachigrame trapéssoide du mouvement avec le maintien id=0
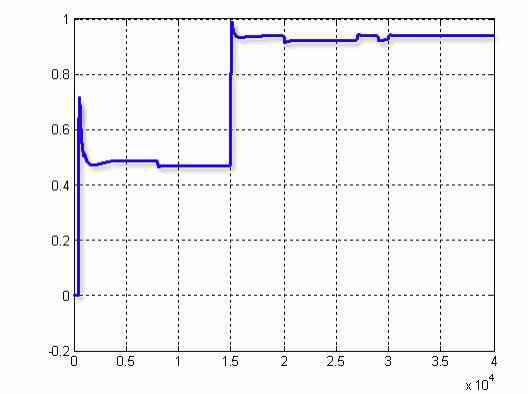
Figure 15 – Le graphique de la dépendance du courant du stator du temps iq*(t) à l'acquittement de travail par le système RF-MS de la tachigrame trapéssoide du mouvement avec le maintien id=0
Le réglage directe pour le couple (DTC)
Le réglage directe pour le moment est, pour régler l'amplitude et la phase du vecteur présentant les flux du stator. On travaile, pour réaliser cela dans les coordonnées de départ du Parc lié aux bobinages du stator, i.e. le repиre dq (les coordonnées d-q) est défini ξs=0, qui coпncide avec le repиre αβ du stator. Donc pour correspondre
![]()
il doit y avoir une égalité
![]()
Des expressions
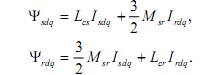
on peut exprimer Isdq et Irdq
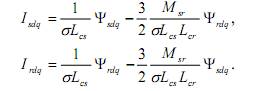
En mettant deux dernières expressions à l'équation du couple électromagnétique
![]()
On peut exprimer le moment par les flux du stator et du rotor

où ρs et ρr – comme il faut les angles entre les vecteurs Ψsdq et Ψrdq et l'axe donné du stator, fig. 16.
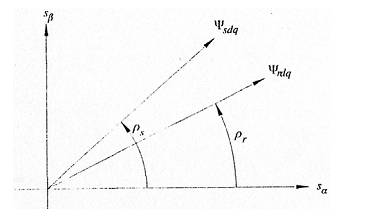
Figure 16 –Les flux du stator et du rotor
La constante du temps du rotor Tr, définissant le changement des flux du rotor, а excиde beaucoup de fois le dernier σLcs/Rs pour les flux du stator.
En utilisant l'équation de l'équilibre électrique pour le stator Usdq et l'expression pour Isdq, on peut montrer l'équation de la transformation des flux du stator:

Donc, on peut examiner concernant l'échelle de temps de la gestion, que le flux du rotor est pratiquement aux constantes selon la direction et l'amplitude et que le couple peut être réglé par l'influence sur le flux du stator.
Le réglage directe pour le couple consiste en, pour soutenir le
niveau (la norme) du flux du stator constante et lui retenir dans la limite d’entre
![]() et
et ![]() ; régler le couple, l'influence sur le coin ρs,
à la partie de son augmentation, si la différence
; régler le couple, l'influence sur le coin ρs,
à la partie de son augmentation, si la différence ![]() diminue
et, au contraire, baisser son (couple) en cas de l'augmentation
diminue
et, au contraire, baisser son (couple) en cas de l'augmentation ![]() .
.
Les signaux correspondant de la gestion sont générés des comparateurs de l’hysteresis.
Le réglage des tensions, qui seront joints au machine, peut être réalisé, en examinant, que l'inverteur de la tension peut soutenir dans le plan sα, sβ seulement sept vecteurs des tensions divers en fonction de la configuration des interrupteurs d’électronique de force, que le font, fig. 17-18.
Figure 17 – La position des clés pour la garantie des niveaux donnés des tensions
(L'animation, 8 effectifs, 5 répétitions, le montant 12,1 кВ)
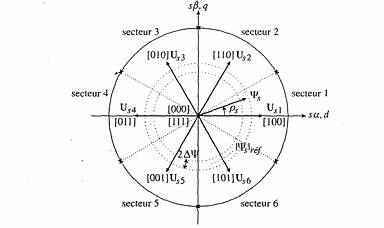
Figure 18 – Les tension sur l'inverteur de la tension
On distingue encore six secteurs. Si, comme à l'exemple présenté sur fig. 18, le vecteur Ψsdq s'installe dans le secteur 1, et les signaux de la gestion inducte, que sa phase ρs doit augmenter (pour augmenter la grandeur du moment), sera joint, nous admettras, la tension Us2 ou Us3 est d'accord à ce qu'est demandé - augmenter ou diminuer la grandeur de l'amplitude Ψsdq.
Par le moyen simple, si on souhaite augmenter la phase ρs, mettront mutuellement Us6 ou Us5 est d'accord а ce que l'amplitude Ψsdq devra augmenter ou diminuer.
Le tableau 1 fait en fonction des signaux de sortie de la gestion des comparateurs de l'hysteresis et le secteur, où se trouve Ψsdq, les vecteurs divers des tensions, qui seront joints (au moteur).
Le tableau 1 - Les tensions joints aux bornes du moteur

L'estimation de la grandeur Ψsdq peut se réaliser par l'intégration simple des tensions, joints au moteur, avec le compte des chutes homiqus de la tension:

Dernier probablement parce que repиres αβ du stator et dq du rotor coпncident si
![]()
En connaissant l'amplitude et la phase Ψsdq on peut facilement définir le moment développé par le moteur. En exprimant Irdq à la fonction Ψsdq et Isdq et en prenant en considération l'expression pour le couple, nous montrerons, que
![]()
L'e réglage directe pour le couple présente l'avantage, qui permet de recevoir les caractéristiques dynamiques augmentées sans nécessité, contrairement à la gestion vectorielle, les comptes compliqués de la capacité, la mesure ou l'estimation exacte de la fréquence de la rotation du rotor. De l'estimation du flux du stator par voie de l'intégration des grandeurs totales, il faut, que le réglage, toute fois, est trиs sensible aux erreurs des mesures. En outre la gestion réalisée des comparateurs de l'hysteresis, conduit vers le travail avec la fréquence variable de l'inverteur de la tension, qui nourrit le moteur.
Vejvlets orthogonals et analyse de plus échelle
La vejvlet-transformation se présente naturellement dans le contexte de l'analyse de plus échelle (multiresolution analysis), МА. МА est structure mathématique synthétisant deux idées du traitement des signaux. La première idée - la décomposition du signal selon les sousdiapazones (subband decomposition) a apparu à l'aide des filtres quadratiques de miroir (quadrature mirror filters) - dans la tûche de la compression des paroles. La deuxiиme idée - la présentation pyramide (pyramid representation) - dans la tûche de la compression des représentations. Les deux idées sont liés à l'application vers le signal des filtres de l'aspect spécial. Dans le premier cas la théorie était construite dans les termes de la Fur'e-transformation du signal, а deuxiиme - dans les termes du signal initial.
Nous examinerons le signal - la succession des nombres x =![]() . Pour l'effacement du
signal, les répressions du bruit et d'autres buts utilisent souvent les
filtres - les transformations les paquets de l'aspect :
. Pour l'effacement du
signal, les répressions du bruit et d'autres buts utilisent souvent les
filtres - les transformations les paquets de l'aspect :
![]() .
.
Le signal y = ![]() réussit par “ moyen local” du signal x avec l'aide de la
composition des "poids"
réussit par “ moyen local” du signal x avec l'aide de la
composition des "poids" ![]() :
:
Par la suite nous seront nйcessaires les notions suivantes.
- La transformation discontinue de Fur’e (TDF)
du signal :
 (la somme formelle).
(la somme formelle). - La z-transformation du signal :
 (la somme
formelle).
(la somme
formelle).
- Lla transformation de Fur’e de la fonction
 a
l'air
a
l'air  .
.
Dans ces termes l'application du filtre s'inscrit tellement :
![]() ,(1.1)
,(1.1)
ou
![]() (1.1')
(1.1')
( si le signal est final, de lui il est ordinaire définissent par l'image périodique pour toutes les significations entières de l'indice).
- Le filtre transposé
 comprend les
mêmes coefficients, que le filtre
comprend les
mêmes coefficients, que le filtre  déplacé
dans l'ordre inverse. Au Fur'e-domaine le filtre transposé a l'air
déplacé
dans l'ordre inverse. Au Fur'e-domaine le filtre transposé a l'air  . Les coefficients
de tous les signaux et les filtres seront supposés matériel.
. Les coefficients
de tous les signaux et les filtres seront supposés matériel.
La
décomposition selon les gammes ![]()
![]()
![]() caractérise la
distribution de la "énergie" du signal selon les
fréquences
caractérise la
distribution de la "énergie" du signal selon les
fréquences ![]() . Parfois il arrive
utilement mettre le signal pour les composants, l'énergie de qui est
concentrée à divers sousdiapazones de fréquence(i.e.
beaucoup autre
du zйro sur divers soussegments du segment
. Parfois il arrive
utilement mettre le signal pour les composants, l'énergie de qui est
concentrée à divers sousdiapazones de fréquence(i.e.
beaucoup autre
du zйro sur divers soussegments du segment ![]() ), et les coder avec le
degré différent du détail (par exemple, en fonction de la
sensibilité de l'oreille humaine aux sons de la fréquence
diverse). Longtemps avant la création de la vejvlet-analyse pour cela on
utilisait le schéma, qui nous décrirons maintenant.
), et les coder avec le
degré différent du détail (par exemple, en fonction de la
sensibilité de l'oreille humaine aux sons de la fréquence
diverse). Longtemps avant la création de la vejvlet-analyse pour cela on
utilisait le schéma, qui nous décrirons maintenant.
Nous voulons trouver deux filtres, h (réprimant d'hautes
fréquences) et g (réprimant les fréquences basses), qui
permettraient de mettre le signal pour deux composants, ![]() et
et
![]() ,
deux fois de ceux-ci rarer
(la moitié des significations devient
superflue - en effet, la gamme de fréquence a été réйduit
deux fois!), mais puis, avec l'aide des filtres transposés, exactement
restaurer selon ces données le signal initial (cette opération on
peut appliquer récoursive). Il est confortable d'inscrire les conditions pour les filtres cherchés
dans les termes de la z-transformation.
,
deux fois de ceux-ci rarer
(la moitié des significations devient
superflue - en effet, la gamme de fréquence a été réйduit
deux fois!), mais puis, avec l'aide des filtres transposés, exactement
restaurer selon ces données le signal initial (cette opération on
peut appliquer récoursive). Il est confortable d'inscrire les conditions pour les filtres cherchés
dans les termes de la z-transformation.
Que
![]() est la
z-transformation d’un du composant. Avant le codage elle a l'occasion rare deux fois, mais avant la restitution du signal initial jusqu'à
la longueur initiale par l'insertion des zéros entre les significations
voisines. Avec cela la z-transformation de
est la
z-transformation d’un du composant. Avant le codage elle a l'occasion rare deux fois, mais avant la restitution du signal initial jusqu'à
la longueur initiale par l'insertion des zéros entre les significations
voisines. Avec cela la z-transformation de ![]() transforme à
transforme à
![]() . Nous
mettrons ici (1.1 ’) pour chacun des filtres, et nous recevrons les
z-transformations le composant avant la restitution
. Nous
mettrons ici (1.1 ’) pour chacun des filtres, et nous recevrons les
z-transformations le composant avant la restitution
![]()
Les z-transformations des filtres transposés ont l'air ![]() et
et
![]() . Le
signal se rétablira avec leur aide exactement, si :
. Le
signal se rétablira avec leur aide exactement, si :
![]() .
.
Nous recevons les conditions de la restitution exacte (perfect reconstruction, PR) :
![]()
Sur la forme matricielle ils s'inscrivent
tellement : ![]()
![]() ,
,
où
![]()
Ayant mis ![]() , nous recevrons les
conditions sur TDF
des filtres cherchés
, nous recevrons les
conditions sur TDF
des filtres cherchés
 (1.2)
(1.2) 
Nous admettras, que nous avons trouvé h tel, que
![]() (1.2’)
(1.2’)
Alors, ayant mis
![]() , (1.3)
, (1.3)
nous voyons, que (1.2) est accompli. La tûche a été
réduit à la présence du polynôme ![]() trigonométrique satisfaisant
(1.2 ’). Sur les méthodes de la construction des tels polynômes
nous nous arrêterons dans le cours suivant. Les filtres h et g, satisfaisant
(1.2), s'appellent les filtres quadratiques de miroir (quadrature mirror
filters, QMF).
trigonométrique satisfaisant
(1.2 ’). Sur les méthodes de la construction des tels polynômes
nous nous arrêterons dans le cours suivant. Les filtres h et g, satisfaisant
(1.2), s'appellent les filtres quadratiques de miroir (quadrature mirror
filters, QMF).
Sur fig. 17, (a) et (b), sont montrés TDF d'une telle paire de filtres h et g, ainsi que le signal initial jusqu'à et après le filtrage (sans rarement).
Figure 17a.
Figure 17b.
On peut appliquer l'exactement même opération à un ou deux de reçu le composant, etc., en obtenant la localisation nécessaire selon la fréquence. Cela permet de s'adapter aux particularités du signal aux frais du choix convenant “de l'arbre de la décomposition”. Il peut avoir l'air, par exemple, tellement :
Figure 18 - “ L'arbre de la décomposition ”
Referances bibliographuques
1. Чиликин М.Г., Сандлер А.С. Общий курс электропривода. - М.: Энергоиздат, 1981. - 576 с.
2. Ключев В.И. Теория электропривода. - М.: Энергоатомиздат,1985-560с.
3. Костенко М.П., Пиотровский Л.М. Электрические машины. В 2-х ч. Ч.2. – Машины переменного тока. Ученик для студентов высш. техн. учеб. заведений. Изд. 3-е, перераб. Л., «Энергия», 1973., 648с.
4. Башарин А. В., Новиков В.А., Соколовский Г.Г. Управление электроприводами: Учебное пособие для вузов. – Л.: Энергоиздат. Ленингр. отд-ние, 1982. – 392с., ил.
5. Моделювання електромеханічних систем: Підручник / Чорний О.П., Луговой А.В., Родькін Д.Й., Сисюк Г.Ю., Садовой О.В. – Кременчук, 2001. – 376с.
6. Daubechies I. Ten Lectures on Wavelets. SIAM, 1992.
7. "Виброакустическая диагностика зарождающихся дефектов"/Балицкий Ф.Я., Иванова М.А., Соколова А.Г., Хомяков Е.И.. М.: Наука, 1984
8. Русов В.А. "Спектральная вибродиагностика" 1996 г. http://www.vibrocenter.ru/book.htm
9. Яблоков А.Е. Автореферат на соискание учёной степени кандидата технических наук. «Вибродиагностика основного технологического оборудования размольного отделения мельницы». М.: Издательский комплекс МГУПП, 2001 г.
10. Трибология. Физические основы, механика и технические приложения. Учебник для вузов/ Беркович И.И., Громаковский Д.Г.; Под ред. Громаковского Д.Г.; Самар. гос. техн. ун-т. Самара, 2000. 268 с.
Lors de la rédaction de ce travail autosummary études supérieures n'est pas terminé. Le travail final peut être obtenu auprès de l'auteur ou le superviseur après Décembre 2010