Трехфазные двигатели и генераторы во вращающемся поле
Авторы: D.Grenier, F.Labrique, H.Buyse, E. Matagne
Перевод: Волошин Н.О.
Источник: Electromécanique . Convertiseurs d’énergie et actionneurs -Dunod, Paris. – 94-103.
Если ![]() становится
отрицательным, то есть если скорость вращения превышает синхронную скорость,
фиктивное сопротивление
становится
отрицательным, то есть если скорость вращения превышает синхронную скорость,
фиктивное сопротивление ![]() становится отрицательным и таким
образом мощность
становится отрицательным и таким
образом мощность ![]() преобразует
электрическую энергию в механическую. Электрическая мощность, полученная источниками,
соединенными в статоре, и механическая мощность, снабжающая механическую
систему, соединенную с ротором, являются отрицательными. Двигатель потребляет
механическую мощность, которую он передает, на внутренние потери, на источники,
присоединенные к обмотке статора: он работает в генераторном режиме.
преобразует
электрическую энергию в механическую. Электрическая мощность, полученная источниками,
соединенными в статоре, и механическая мощность, снабжающая механическую
систему, соединенную с ротором, являются отрицательными. Двигатель потребляет
механическую мощность, которую он передает, на внутренние потери, на источники,
присоединенные к обмотке статора: он работает в генераторном режиме.
Если ![]() становится больше
1, скорость вращения становится отрицательной, мощность, рассеиваемая в
фиктивном сопротивлении
становится больше
1, скорость вращения становится отрицательной, мощность, рассеиваемая в
фиктивном сопротивлении ![]() , также становится отрицательной. Так
как сопротивление имеет величину, меньшую
, также становится отрицательной. Так
как сопротивление имеет величину, меньшую ![]() , мощность, преобразуемая из
механической энергии в электрическую, меньше тепловых потерь в роторе, равных
, мощность, преобразуемая из
механической энергии в электрическую, меньше тепловых потерь в роторе, равных ![]() . Двигатель поглощает
механическую и электрическую энергию, которую он превращает в тепло. Этот
способ работы встречается только в исключительных случаях.
. Двигатель поглощает
механическую и электрическую энергию, которую он превращает в тепло. Этот
способ работы встречается только в исключительных случаях.
Если
пренебрегаем элементами ![]() и
и ![]() в схеме (рисунок 4.3), то можно
допустить, что
в схеме (рисунок 4.3), то можно
допустить, что ![]() ,
уравнения (4.27) и (4.28) составляют систему параметрических уравнений
механической характеристики (рисунок 4.7)
,
уравнения (4.27) и (4.28) составляют систему параметрических уравнений
механической характеристики (рисунок 4.7)

Рисунок 4.7 – Механическая характеристика
Исходя из
(4.27) по отношению к ![]() , получаем:
, получаем:

Электромагнитный
момент является максимальным и положительным для ![]() и равен тогда
и равен тогда ![]() . Он минимальный и
отрицательный для
. Он минимальный и
отрицательный для ![]() и равен тогда
и равен тогда ![]() .
.
Значения ![]() , соответствующие
максимуму и минимуму момента, являются нормальными при достаточной близости к
нулю, и скорости вращения, которые им соответствуют, достаточно близки к
синхронной скорости, так, как мы это увидим в параграфе 4.2.7, чтобы иметь
высокий КПД преобразования, мы должны иметь
, соответствующие
максимуму и минимуму момента, являются нормальными при достаточной близости к
нулю, и скорости вращения, которые им соответствуют, достаточно близки к
синхронной скорости, так, как мы это увидим в параграфе 4.2.7, чтобы иметь
высокий КПД преобразования, мы должны иметь ![]() .
.
Мы можем
получить лучшую оценку механической характеристики, используя эквивалентную
схему (рисунок 4.4), которая применяется для приближенного метода расчета
элементов ![]() и
и
![]() . Выражая,
исходя из этой схемы, мощность
. Выражая,
исходя из этой схемы, мощность ![]() , которая представляет мощность,
преобразующую электрическую энергию в механическую, получаем следующее
соотношение:
, которая представляет мощность,
преобразующую электрическую энергию в механическую, получаем следующее
соотношение:

4.2.5 Нормальная работа в установившемся режиме. Стабильность рабочей точки
Чтобы
определить рабочую точку двигателя, когда он напрямую подключен к сети,
достаточно знать статическую механическую характеристику ![]() исследуемой системы.
Действительно, при оценке сети она может быть представлена как идеальный
источник напряжения, она не навязывает никаких принуждений в обмене энергии,
так как такой источник может как давать, так и потреблять любую мощность. Таким
образом, именно механическая система навязывает условия работы.
исследуемой системы.
Действительно, при оценке сети она может быть представлена как идеальный
источник напряжения, она не навязывает никаких принуждений в обмене энергии,
так как такой источник может как давать, так и потреблять любую мощность. Таким
образом, именно механическая система навязывает условия работы.
Рабочая точка находится
в точке пересечения характеристики, показывающей электромагнитный момент
двигателя в функции его скорости вращения ![]() , с кривой
, с кривой ![]() , где
, где ![]() – момент потерь, вызванный
вращением ротора двигателя (рисунок 4.8).
– момент потерь, вызванный
вращением ротора двигателя (рисунок 4.8).
По значению
скорости вращения ![]() ,
обусловленной точкой пересечения двух кривых, и по пульсации питания
,
обусловленной точкой пересечения двух кривых, и по пульсации питания ![]() мы находим значение
скольжения:
мы находим значение
скольжения:

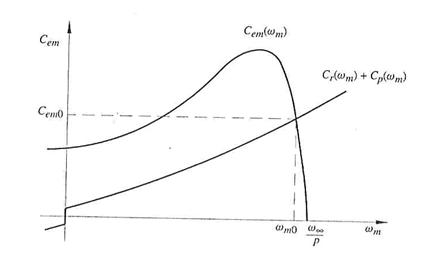
Рисунок 4.8 – Определение рабочей точки
Мы можем тогда
определить значение сопротивления ![]() эквивалентной схемы (рисунок 4.3 или
4.4) и найти из этой схемы значение тока
эквивалентной схемы (рисунок 4.3 или
4.4) и найти из этой схемы значение тока ![]() .
.
Для изучения стабильности рабочей точки исходим из уравнения (4.1), которое мы линеаризируем относительно этой точки:

где ![]() – отклонение, существующее между
скоростью вращения
– отклонение, существующее между
скоростью вращения ![]() и ее режимным значением
и ее режимным значением ![]() .
.
Это уравнение
показывает, что реакция на возмущение ![]() скорости по отношению к ее режимному
значению является экспонентой, постоянная времени которой равна
скорости по отношению к ее режимному
значению является экспонентой, постоянная времени которой равна ![]() .
.
Рабочая точка стабильна, если реакция убывающая, таким образом:

откуда следует, что увеличение скорости вращения вызывает появление тормозящего момента, уменьшение скорости – появление ускоряющего момента.
Если рабочая
точка располагается на части характеристики ![]() , которая заключена между
максимальнім и минимальным моментом, производная
, которая заключена между
максимальнім и минимальным моментом, производная ![]() отрицательна. В этом случае при оценке
кривой, соответствующей сумме момента сопротивления и момента потерь, она имеет
нормально положительній наклон, рабочая точка всегда стабильна.
отрицательна. В этом случае при оценке
кривой, соответствующей сумме момента сопротивления и момента потерь, она имеет
нормально положительній наклон, рабочая точка всегда стабильна.
4.2.6 Учет неидеального характера магнитных материалов
До сих пор, в соответствии с гипотезой, сделанной в параграфе 2.2 главы 2, мы пренебрегали магнитными потерями. Кроме того мы предположили, что магнитные материалы были линейными. В этом параграфе мы собираемся коротко отметить, как мы можем учесть неидеальный характер магнитных материалов.
Мы
можем учесть магнитные потери в статоре, помещая параллельно с полным сопротивлением ![]() сопротивление
сопротивление ![]() большего значения
(рисунок 4.9). Действительно, можем показать, что эти магнитные потери
существенно пропорциональны квадрату амплитуды поля, вращающегося в воздушном
зазоре, и квалрату скорости этого поля по отношению к статору, таким образом
существенно пропорциональны квадрату напряжения, которое это поле наводит в
статорных обмотках. Магнитные потери в роторе меняются со скольжением. Они тем
меньше, чем
большего значения
(рисунок 4.9). Действительно, можем показать, что эти магнитные потери
существенно пропорциональны квадрату амплитуды поля, вращающегося в воздушном
зазоре, и квалрату скорости этого поля по отношению к статору, таким образом
существенно пропорциональны квадрату напряжения, которое это поле наводит в
статорных обмотках. Магнитные потери в роторе меняются со скольжением. Они тем
меньше, чем ![]() ближе
к нулю. Можно это учесть небольшим увеличением значения сопротивления
ближе
к нулю. Можно это учесть небольшим увеличением значения сопротивления ![]() .
.
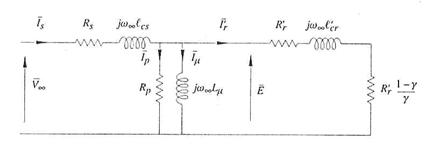
Рисунок 4.9 – Эквивалентная схема, учитывающая магнитные потери
Мы
можем учесть начыщение, меняя значения ![]() с
с ![]() , как мы это показали в части 3.7 главы
3. В случае прямого питания от сети, при оценке упрощенной эквивалентной схемы
(рисунок 4.4) можно описать работу двигателя с достаточной точностью, когда
скольжение мало, имеем, даже при наличии насыщения магнитных материалов,
постоянное значение
, как мы это показали в части 3.7 главы
3. В случае прямого питания от сети, при оценке упрощенной эквивалентной схемы
(рисунок 4.4) можно описать работу двигателя с достаточной точностью, когда
скольжение мало, имеем, даже при наличии насыщения магнитных материалов,
постоянное значение ![]() , так как в этой схеме имеем
, так как в этой схеме имеем ![]() , что ведет к
постоянному уровню насыщения.
, что ведет к
постоянному уровню насыщения.
Отметим, что, если мы принимаем в расчет магнитные потери и насыщение, формула (4.27) момента остается действительной.
4.2.7 Мощности. КПД. Используемая рабочая зона
Как показывает
векторная диаграмма (рисунок 4.5), ток ![]() , потребляемый асинхронным двигателем,
сдвинут назад по фазе по отношению к напряжению питания
, потребляемый асинхронным двигателем,
сдвинут назад по фазе по отношению к напряжению питания ![]() на угол
на угол ![]() , существенно равный
, существенно равный ![]() , когда двигатель
работает в режиме холостого хода (то есть для
, когда двигатель
работает в режиме холостого хода (то есть для ![]() ), меньше
), меньше ![]() для работы в двигательном режиме,
больше
для работы в двигательном режиме,
больше ![]() для
работы в генераторном режиме.
для
работы в генераторном режиме.
Активная
мощность ![]() ,
поглощаемая двигателем, равна
,
поглощаемая двигателем, равна ![]() ; она положительная для двигательного
режима, отрицательная для генераторного режима.
; она положительная для двигательного
режима, отрицательная для генераторного режима.
Реактивная
мощность ![]() ,
поглощаемая двигателем, равна
,
поглощаемая двигателем, равна ![]() . Она положительная для всех режимов
работы.
. Она положительная для всех режимов
работы.
Полная
мощность ![]() равна
равна
![]() , всегда
превосходит абсолютное значение активной мощности
, всегда
превосходит абсолютное значение активной мощности ![]() , так как намагничивающий ток
, так как намагничивающий ток ![]() представляет
значительную часть тока
представляет
значительную часть тока ![]() в нормальной зоне работы.
в нормальной зоне работы.
Чтобы
рассчитать КПД, мы используем эквивалентную схему (рисунок 4.9). Мощность,
входящая в статор, ![]() , распределяется на (рисунок 4.10):
, распределяется на (рисунок 4.10):
– тепловые потери в статоре (![]() );
);
– магнитные потери (![]() );
);
– мощность, переданная на ротор, ![]() , которая может
записаться
, которая может
записаться ![]() ,
используя (4.27);
,
используя (4.27);
– тепловые потери в роторе (![]() ), равные
), равные ![]() ;
;
– мощность преобразования
электрической энергии в механическую (![]() ) равна
) равна ![]()
Используемая
механическая мощность получается, вычитая из механической мощности, полученной
внутри двигателя, внутренние потери в преобразователе ![]() .
.
Констатируем,
что из мощности, переданной на ротор, часть ![]() становится тепловыми потерями, а часть
становится тепловыми потерями, а часть
![]() превращается
в механическую мощность.
превращается
в механическую мощность.
КПД двигателя
таким образом заметно снижается, когда ![]() прекращает быть близким к нулю.
прекращает быть близким к нулю.
Чтобы у
двигателя был приемлемый КПД, нужно отрегулировать параметры соответствующими
конструктивными изменениями так, чтобы используемая рабочая
область соответствовала значениям ![]() , идущим от 0 до 10% для двигателей
малой мощности (от нескольких сотен ватт до нескольких киловатт), для которых
КПД от 70 до 80% приемлем, от 0 до 2-3% для двигателей средней мощности
(порядка 100 кВт) и от 0 до менее 1% для двигателей большой мощности (от сотен
киловатт до нескольких мегаватт).
, идущим от 0 до 10% для двигателей
малой мощности (от нескольких сотен ватт до нескольких киловатт), для которых
КПД от 70 до 80% приемлем, от 0 до 2-3% для двигателей средней мощности
(порядка 100 кВт) и от 0 до менее 1% для двигателей большой мощности (от сотен
киловатт до нескольких мегаватт).
Для этого
нужно, чтобы наклон механической характеристики был очень жестким в районе
синхронной скорости. Это требует, чтобы значение ![]() было значительно меньше 1 (смотри
рисунок 4.7).
было значительно меньше 1 (смотри
рисунок 4.7).
Наконец
отметим, что момент пропорционален квалрату напряжения питания (см. уравнение
4.31), и напряжение сети может быть подвержено переходному процессу порядка 20%
по отношению к его номинальному значению, мы обычно выбираем используемую
рабочую зону, ограниченную значениями момента, не превосходящими 30-50%
значения максимального момента при номинальном напряжении сети. Таким образом,
даже при наличии значительного падения напряжения сети, максимальный момент,
который может развить двигатель, остается больше момента сопротивления,
противоположного приводимой системе. (Если бы это не было случаем, двигатель
стал бы неспособным привести механическую систему и быстро замедлился бы до
остановки (![]() ).
Это явление, называемое расцепкой, приводит к значительному увеличению
потребляемого двигателем тока и может вызвать его быстрое разрушение из-за
чрезмерного перегрева.)
).
Это явление, называемое расцепкой, приводит к значительному увеличению
потребляемого двигателем тока и может вызвать его быстрое разрушение из-за
чрезмерного перегрева.)
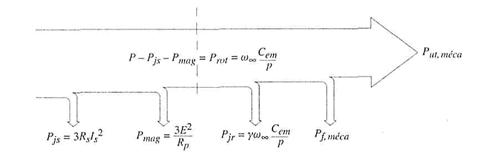
Рисунок 4.10 – Баланс мощностей
4.2.8 Прямой пуск от сети
Хотя асинхронные двигатели были все более и более часто снабжены преобразователями мощности, которые позволяют обеспечить регулировку их условий работы, в особенности во время их пуска в качестве двигателя, существуют еще множественные применения, где прибегаем к прямому пуску двигателя от сети.
На основе гипотезы, введенной в параграфе 4.1.2, мы можем разложить переходный процесс пуска на два этапа:
– первый очень короткий этап, в течение которого мы можем допустить, что скорость вращения остается нулевой и где имеет
место установившийся режим, соответствующий значению ![]() , равному 1;
, равному 1;
– второй этап, в течение которого скорость вращения ![]() изменяется от нуля
до значения установившегося режима. В течение этого второго этапа мы можем
допустить, что в любой момент значения электрических величин мало отличаются от
тех, которые мы имели бы в случае установившенося режима с постоянной скоростью
вращения, равной значению
изменяется от нуля
до значения установившегося режима. В течение этого второго этапа мы можем
допустить, что в любой момент значения электрических величин мало отличаются от
тех, которые мы имели бы в случае установившенося режима с постоянной скоростью
вращения, равной значению ![]() скорости в этот момент.
скорости в этот момент.
Если мы используем упрощенную
эквивалентную схему (рисунок 4.4), электромагнитный момент, развиваемый
двигателем за время ![]() , где скорость вращения составляет
, где скорость вращения составляет ![]() , представляется
выражением (4.31) при условии принятия для
, представляется
выражением (4.31) при условии принятия для ![]() следующего значения:
следующего значения:

Уравнение, которое нужно учесть,
чтобы получить изменение скорости ![]() во время пуска:
во время пуска:

Это уравнение нелинейное и может быть решено только численным методом.
Можем оценить
изменение эффективного значения токов, потребляемых из сети во время пуска,
считая ![]() ,
исходя из эквивалентной схемы (рисунок 4.4), где мы берем для
,
исходя из эквивалентной схемы (рисунок 4.4), где мы берем для ![]() значение, данное в
(4.35).
значение, данное в
(4.35).
Отметим, что, если мы располагаем из всей информации только графическим представлением механической характеристики (рисунок 4.8), мы можем использовать приближенное выражение этой кривой, чтобы осуществить численное интегрирование уравнения (4.36).
4.2.9 Улучшения поведения во время прямого пуска от сети
4.2.9.1 Адаптация механической характеристики
Чтобы
гарантировать высокий КПД превращения в нормальной рабочей зоне, нужно, чтобы
роторное сопротивление ![]() имело очень малое значение таким
образом, чтобы иметь очень жесткую механическую характеристику в зоне,
расположенной вокруг синхронной скорости. Но тогда момент, развиваемый при
остановке (то есть для
имело очень малое значение таким
образом, чтобы иметь очень жесткую механическую характеристику в зоне,
расположенной вокруг синхронной скорости. Но тогда момент, развиваемый при
остановке (то есть для ![]() ), относительно мал, это дает тяжелый,
даже невозможный пуск, если приводимая система противопоставляет своему
вращению значительный момент сухого трения. Если мы имеем роторное
сопротивление
), относительно мал, это дает тяжелый,
даже невозможный пуск, если приводимая система противопоставляет своему
вращению значительный момент сухого трения. Если мы имеем роторное
сопротивление ![]() значением
существенно большим, момент, связанный с остановкой, это делает пуск легким, но
существенно уменьшает наклон механической характеристики в зоне малых
скольжений и ухудшает КПД в нормальной зоне работы. Рисунок 4.11 иллюстрирует
влияние
значением
существенно большим, момент, связанный с остановкой, это делает пуск легким, но
существенно уменьшает наклон механической характеристики в зоне малых
скольжений и ухудшает КПД в нормальной зоне работы. Рисунок 4.11 иллюстрирует
влияние ![]() на
поведение механической характеристики.
на
поведение механической характеристики.
Для двигателей
с фазным ротором легко можем применить требования большого значения ![]() во время пуска, не
вводя роторные обмотки в короткое замыкание, но замыкая их вновь через кольца и
щетки на внешнее трехфазное сопротивление
во время пуска, не
вводя роторные обмотки в короткое замыкание, но замыкая их вновь через кольца и
щетки на внешнее трехфазное сопротивление ![]() (рисунок 4.12), которое мы
стремительно замыкаем по мере того, как двигатель ускоряется.
(рисунок 4.12), которое мы
стремительно замыкаем по мере того, как двигатель ускоряется.
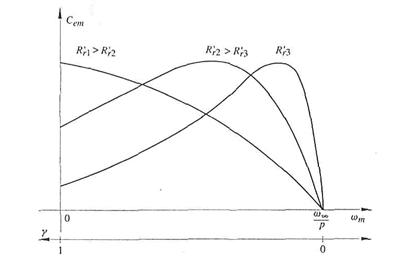
Рисунок
4.11 – Влияние значения ![]() на механические характеристики
на механические характеристики
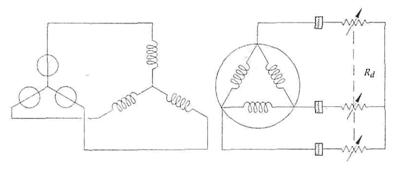
Рисунок 4.12 – Использование пускового сопротивления
В случае двигателей с беличьей клеткой можем получить подобный результат, снабжая ротор двумя обмотками (рисунок 4.13) (Представление конструктивных исполнений, позволяющее получить индуктивность величины различных необходимых точностей, потребовало бы приведение численного расчета поля):
– одной, имеющей большое
сопротивление ![]() и
малую индуктивность
и
малую индуктивность ![]() ,
,
– другой, имеющей малое
сопротивление ![]() и
большую индуктивность
и
большую индуктивность ![]() .
.
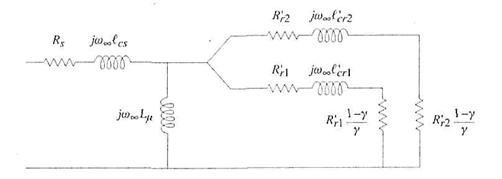
Рисунок 4.13 – Эквивалентная схема двигателя с двумя обмотками
При остановке
и при малой скорости вращения, когда ![]() близко к единице, напряжения,
индуцируемые в роторе, имеют пульсации, близкие к пульсациям напряжения
питания. Полные сопротивления двух обмоток ротора существенно равны
близко к единице, напряжения,
индуцируемые в роторе, имеют пульсации, близкие к пульсациям напряжения
питания. Полные сопротивления двух обмоток ротора существенно равны ![]() и
и ![]() (см. уравнение
4.3). Индуктивная составляющая этих полных сопротивлений преобладает; ток
протекает главным образом в обмотке малой индуктивности и большого
сопротивления. В области синхронной скорости, когда
(см. уравнение
4.3). Индуктивная составляющая этих полных сопротивлений преобладает; ток
протекает главным образом в обмотке малой индуктивности и большого
сопротивления. В области синхронной скорости, когда ![]() близко к нулю, полные
сопротивления обмоток главным образом активные и ток протекает главным образом
по обмотке малого сопротивления. Мы видим, таким образом, что выполнение ротора
с двумя обмотками позволяет получить результат, эквивалентный результату
включения пускового сопротивления, играя параметрами обеих обмоток, можем
получить разные типы механических характеристик (рисунок 4.14).
близко к нулю, полные
сопротивления обмоток главным образом активные и ток протекает главным образом
по обмотке малого сопротивления. Мы видим, таким образом, что выполнение ротора
с двумя обмотками позволяет получить результат, эквивалентный результату
включения пускового сопротивления, играя параметрами обеих обмоток, можем
получить разные типы механических характеристик (рисунок 4.14).
4.2.9.2 Уменьшение потребляемого тока
В конце
электрического переходного процесса включения, который составляет первый этап
пуска (см. параграф 4.2.8), потребляемый ток получает значение, существенно
равное тому, что имел в установившемся режиме для ![]() : для двигателей с фазным ротором, если
мы даем для сопротивления
: для двигателей с фазным ротором, если
мы даем для сопротивления ![]() пускового реостата достаточно высокое
значение, потребляемый ток может быть ограничен значением, близким к номинальному
току, но для двигателей с беличьей клеткой это значение явно превосходит
номинальный ток двигателя (от 5 до 10 раз больше) и может быть неприемлемым для
системы питания, если ее внутреннее полное сопротивление недостаточно мало. В
этом случае нужно уменьшить напряжение питания двигателя во время пуска, что
существенно уменьшает наличный момент (так как момент существенно
пропорционален квадрату напряжения питания, как это показывает уравнение 4.31).
пускового реостата достаточно высокое
значение, потребляемый ток может быть ограничен значением, близким к номинальному
току, но для двигателей с беличьей клеткой это значение явно превосходит
номинальный ток двигателя (от 5 до 10 раз больше) и может быть неприемлемым для
системы питания, если ее внутреннее полное сопротивление недостаточно мало. В
этом случае нужно уменьшить напряжение питания двигателя во время пуска, что
существенно уменьшает наличный момент (так как момент существенно
пропорционален квадрату напряжения питания, как это показывает уравнение 4.31).
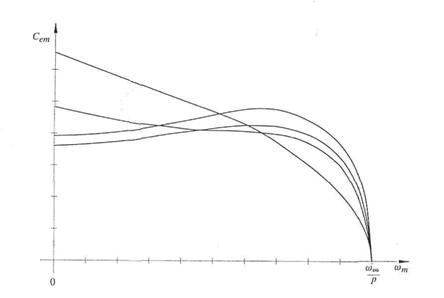
Рисунок 4.14 – Стандартные характеристики двигателей с короткозамкнутым ротором
В случае
двигателей малой или средней мощности наиболее используемый метод для
нахождения напряжения на концах статорных обмоток во время пуска состоит в
использовании двигателей, у которых статор соединен в треугольник в нормальных
условиях работы. Достаточно соединить эти обмотки в звезду во время
первоначальной фазы пуска, чтобы уменьшить в ![]() раз напряжения, которые к ним
приведены, а также в
раз напряжения, которые к ним
приведены, а также в ![]() раз фазные токи и в 3 раза линейные токи
по отношению к случаю, где они были бы соединены в треугольник.
раз фазные токи и в 3 раза линейные токи
по отношению к случаю, где они были бы соединены в треугольник.