| Мова | Language |
 |
 |
| Мова | Language |
|
|

Факультет: |
Инженерной механики |
Специальность: |
Компьютерное проектирование мехатронного горного оборудования |
Тема работы: |
Математическая модель процесса работы крепи ДМ |
Руководитель: |
Семенченко Анатолий Кириллович |
Актуальность задачи. Базой современных очистных комплексов для отработки пологонаклонных пластов являются щитовые механизированные крепи, конструкция и параметры которых должны обеспечивать надёжную высокопроизводительную работу всего оборудования комплекса и безопасность работы персонала. Механизированная крепь, как одна из базовых машин очистного комплекса, в значительной мере определяет его производительность. В этой связи обоснование и развитие методов исследования и расчета параметров при проектировании механизированных крепей с характеристиками, обеспечивающими их эффективную эксплуатацию в условиях повышения нагрузок на очистной забой, является актуальной научной и практической задачей, имеющей отраслевое значение.
Анализ исследований и научная новизна. Решению задачи исследования и расчету параметров механизированных крепей посвящены работы ряда авторов. Разработаны аналитические методы, проведены экспериментальные исследования. Вместе с тем, на современном этапе полученные результаты позволяют решать локальные задачи и не обеспечивают решение задачи оптимизации на основании полной математической модели механизированной крепи. В данной работе предлагается математическая модель кинематических параметров механизированной крепи, математическая модель крепи и систем гидропривода на основании функционально законченных элементов, позволяющая решить задачу исследования, расчета и оптимизации параметров механизированных крепей.
Цель и задачи работы. Целью работы является разработка современных средств исследования параметров секций механизированных крепей для их модернизации, обеспечивающей повышение эффективности эксплуатации механизированных комплексов.
Для определения кинематических параметров использовалась математическая модель вида:
![]()
Где YK – выходной вектор, компонентами которого являются координаты точек 3, 4, 5,7, 8, 9, 10;
lC и lG – длина гидростойки и стабилизирующего домкрата соответственно. Являются аргументами вектор-функции fK;
P – вектор конструктивных параметров четырёхзвенника.
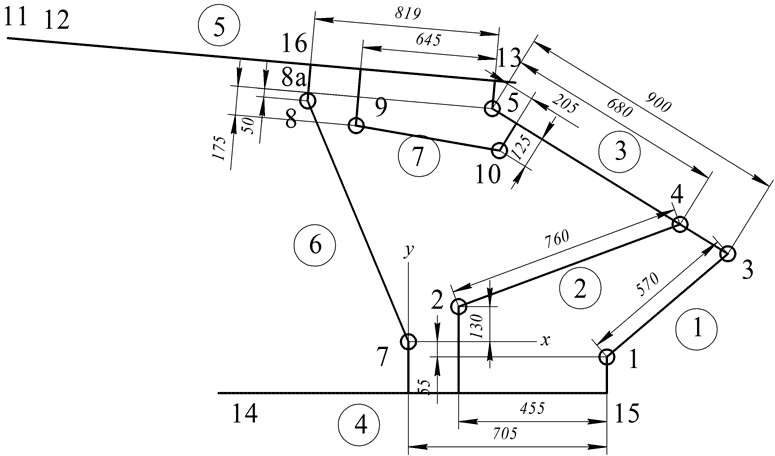
Рисунок 1 – Расчётная схема для определения кинематических параметров. |
Исходными данными являются конструктивные параметры крепи:
Расстояния между точками являются ограничениями, на основе которых составляются уравнения кинематики.
![]() , м;
, м;
![]() , м;
, м;
![]() , м;
, м;
![]() , м;
, м;
![]() , м;
, м;
![]() , м;
, м;
l54 = 0,68 м; l24 = 0,76 м; l13 = 0,57 м;
lC и lG переменные величины.
Координаты неподвижных точек 7, 2, 1:
x7= 0; x2= 0,25; x1= 0,705;
y7 = 0; y2= 0,13; y1= -0,055.
Решение.
На основании ограничений составляется система уравнений:

Составленная система уравнений 14-го порядка решается при помощи программного обеспечения Mathcad.
На основе полученной модели кинематики построим график изменения координаты x точки 1 от длины гидростойки d = f(t), для трёх положений стабилизирующего гидродомкрата lG = 0,5; 0,7; 0,8 м.
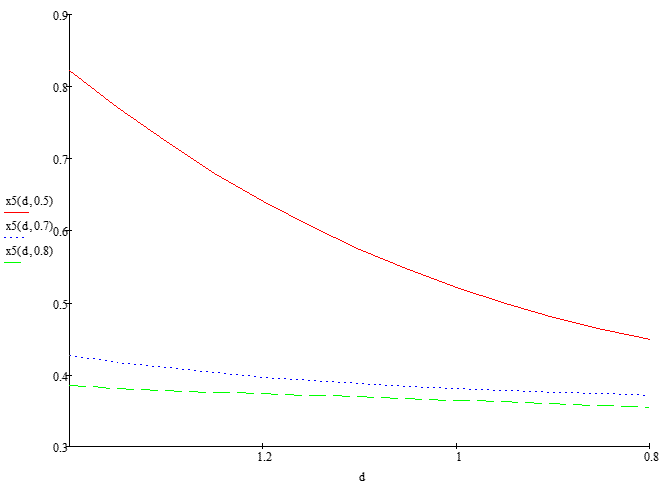
Рисунок 2 – График функции x5 = f(d,lG). |
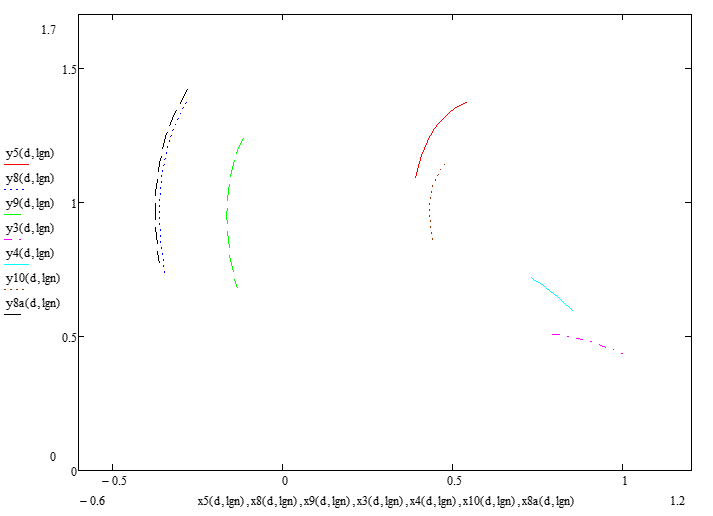
Рисунок 3 – Траектории точек 3,4,5,8,8а,9,10. |
Анимация процесса работы крепи. |
Из графика видно, что в процессе работы базовое перекрытие смещается в сторону забоя, что положительно сказывается на состоянии кровли.
На данном этапе выполнения работы разработана упрощённая модель механизированной крепи на основании следующих функционально законченных элементов:
Из приведенных ФЗЭ составляем упрощенную схему механизированной крепи и насосной станции. Пространственно перемещающуюся массу заменяем линейно перемещающейся массой.
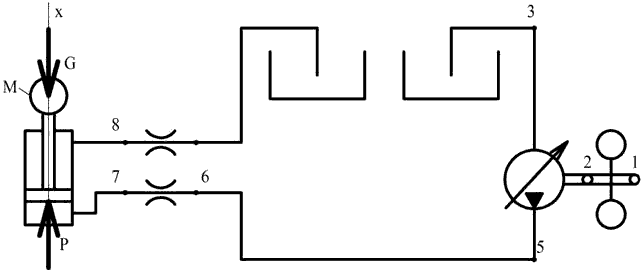
Рисунок 4 – Расчётная схема. |
Описание расчётной схемы:
Асинхронный электродвигатель вращает насос через вал 2. Насос забирает рабочую жидкость из гидробака и нагнетает её в трубопровод 5-6. Из трубопровода, через дроссель 6-7, жидкость поступает в поршневую полость гидродомкрата. Дроссель 6-7 имитирует сопротивление гидрораспределителя. Давление рабочей жидкости на поршень создаёт силу P, которая, преодолевая силу G, вытесняет жидкость из штоковой полости 8. Через дроссель рабочая жидкость возвращается в гидробак.
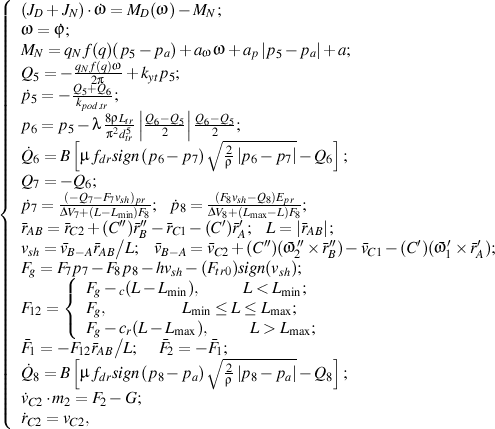
На основании расчетной схемы составляем систему уравнений:
где JD – момент инерции ротора электродвигателя;
JN – момент инерции насоса;
ω – угловая скорость ротора электродвигателя;
MD(ω) – статическая механическая характеристика асинхронного электродвигателя. МХ аппроксимируется тремя прямыми линиями;
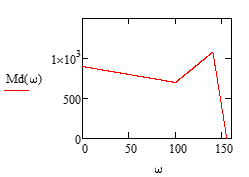
Рисунок 5 – Механическая характеристика |
МN – вращающий момент на валу насоса;
qN – максимальный рабочий объем насоса;
f(q) – параметр регулирования, -1 ≤ f(q) ≤ 1;
рa, p5 – давление на входе и выходе из насоса соответственно;
аw - коэффициент гидромеханических потерь, зависящих от угловой скорости;
аp - коэффициент гидромеханических потерь, зависящих от давления;
а – постоянная гидромеханических потерь;
Q5 – расход рабочей жидкости на выходе из насоса;
kyt – коэффициент объемных потерь насоса;
p5, p6 – давление на входе и на выходе из трубопровода;
Q5, Q6 – расход рабочей жидкости на входе и на выходе из трубопровода;
kpod.tr – коэффициент податливости трубопровода с жидкостью;
l – коэффициент потерь по длине;
ρ – плотность рабочей жидкости;
Ltr – длина трубопровода;
dtr – диаметр трубопровода;
Расчетные параметры:

Еpr – приведенный объемный модуль упругости трубопровода с жидкостью;
Еj – модуль упругости жидкости;
Еst – модуль упругости материала стенок трубопровода;
dtr – толщина стенок трубопровода;
Re – число Рейнольдса;
νj – кинематическая вязкость рабочей жидкости.
Q6, Q7, Q8 – расходы в соответствующих точках дросселя;
В – параметр, учитывающий инерционность столба жидкости;
μ – коэффициент расхода, μ=ζ-0,5;
ζ – коэффициент гидравлического сопротивления;
fdr – площадь проходного сечения дросселя;
p7, p8 – давления в точках подключения гидроцилиндра;
Q7, Q8 – расходы в точках подключения гидроцилиндра;
F7, F8 – площади поршня в соответствующих полостях;
vsh – скорость перемещения штока относительно стакана цилиндра;
Δv7, Δv8 – «мертвые» объемы полостей;
L, Lmin, Lmax – текущая, минимальная и максимальная длина цилиндра (расстояние AB); L определяется взаимным расположением соединяемых ППМ, а Lmin и Lmax– конструкцией гидроцилиндра;
rC1, rC2 – радиус-векторы центров масс ППМ 1 и 2 в СК OXYZ;
C',C'' – матрицы направляющих косинусов СК C1X'Y'Z' и C2X''Y''Z'', жестко связанных с ППМ 1 и 2 соответственно, в СК OXYZ, жестко связанной с забоем;
vB-A – скорость точки B относительно А в СК OXYZ;
vC1, vC2 – скорости центров масс ППМ 1 и 2 в СК OXYZ;
ω'1, ω''2 – угловые скорости ППМ 1 и 2 в СК C1X'Y'Z' и C2X''Y''Z'' соответственно;
h – коэффициент демпфирования;
Ftr0 – постоянная трения;
Cc,Cr – жесткости полностью сдвинутого и полностью раздвинутого цилиндра;
F1,F2 – реакции в гидроцилиндре, приложенные к ППМ 1 и 2 в СК OXYZ;
Расчетные параметры:
![]()
dp – диаметр поршня;
dsh7, dsh8 – диаметры штоков в соответствующих полостях;
Данная система дифференциальных уравнений решается при помощи программного обеспечения Mathcad методом Рунге-Кутта.
Рисунок 6 – Графическая зависимость угловой скорости |
Из рис. 6 видно, что электродвигатель разгоняется на протяжении 2,4 с.
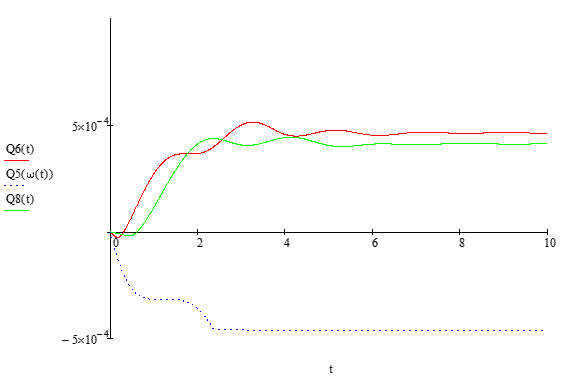 Рисунок 7 – Графическая зависимость расхода в точках 5,6,8 от времени. |
Если уравнения решены верно, то расходы в точках 5 и 6 должны быть одинаковыми по величине и противоположными по знаку. Чтобы проверить это условие, необходимо проинтегрировать расход по времени.
![]() , м3/с;
, м3/с;
![]() , м3/с;
, м3/с;
Разница в величинах расходов 5 и 6 обусловлена упругим расширением трубопровода.
Из рис. 7 видно, что в начальный момент времени в точках 6 и 8 расход отрицательный. Это обусловлено действием силы G, промежуток времени разгона двигателя.
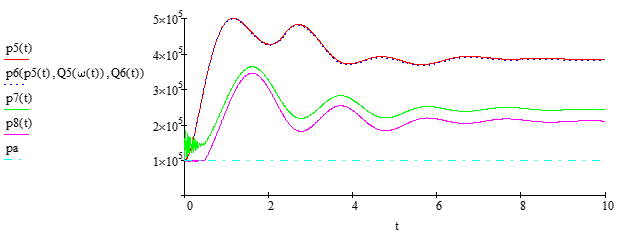
Рисунок 8 – Графическая зависимость давления в точках 5,6,7,8 от времени. |
Колебания давления в точке 7 (рис. 8) вызваны колебательной системой состоящей из массы m2 и гидроцилиндра с жидкостью, играющего роль пружины.
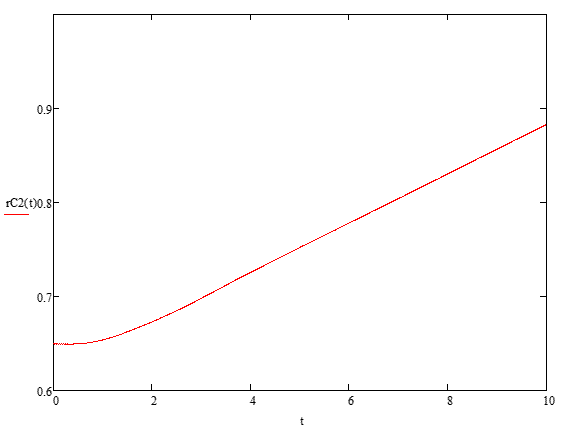
Рисунок 9 – Графическая зависимость движения центра массы m2 от времени. |
В результате проведенной работы были разработаны математические модели для анализа кинематических параметров крепи, а также математическая модель крепи и системы гидропривода на основании функционально законченных элементов, позволяющая решить задачу исследования, расчета и оптимизации параметров механизированных крепей. В дальнейшем эти математические модели войдут в состав САПР для расчёта горных машин и комплексов.