| Язык | Language |
 |
 |
| Язык | Language |
|
|

Факультет: |
Інженерної механіки |
Спеціальність: |
Комп'ютерне проектування мехатронного гірничого обладнання |
Тема роботи: |
Математична модель процесу роботи кріплення ДМ |
Керівник: |
Семенченко Анатолій Кирилович |
Актуальність завдання. Базою сучасних очисних комплексів для відпрацювання пологонаклонних пластів є щитові механізовані кріплення, конструкція і параметри яких повинні забезпечувати надійну високопродуктивну роботу всього устаткування комплексу і безпеку роботи персоналу. Механізоване кріплення, як одна з базових машин очисного комплексу, значною мірою визначає його продуктивність. У зв'язку з цим обгрунтування і розвиток методів дослідження і розрахунку параметрів при проектуванні механізованих кріплень з характеристиками, що забезпечують їх ефективну експлуатацію в умовах підвищення навантажень на очисний забій, є актуальною науковою і практичною задачею, що має галузеве значення.
Аналіз досліджень та наукова новизна. Вирішенню завдання дослідження і розрахунку параметрів механізованих кріплень присвячені роботи ряду авторів. Розроблено аналітичні методи, проведені експериментальні дослідження. Разом з тим, на сучасному етапі отримані результати дозволяють вирішувати локальні завдання й не забезпечують вирішення задачі оптимізації на підставі повної математичної моделі механізованого кріплення. У даній роботі пропонується математична модель кінематичних параметрів механізованого кріплення, математична модель кріплень і систем гідроприводу на підставі функціонально закінчених елементів, що дозволяє вирішити завдання дослідження, розрахунку та оптимізації параметрів механізованих кріплень.
Мета і завдання роботи. Метою роботи є розробка сучасних засобів дослідження параметрів секцій механізованих кріплень для їх модернізації, що забезпечує підвищення ефективності експлуатації механізованих комплексів.
Для визначення кінематичних параметрів використовувалася математична модель вида:
![]()
Де YK – вихідний вектор, компонентами якого є координати точок 3, 4, 5,7, 8, 9, 10;
lC і lG – довжина гідростійками і стабілізуючого домкрата відповідно. Є аргументами вектор-функції fK;
P – вектор конструктивних параметрів четирьохланника.
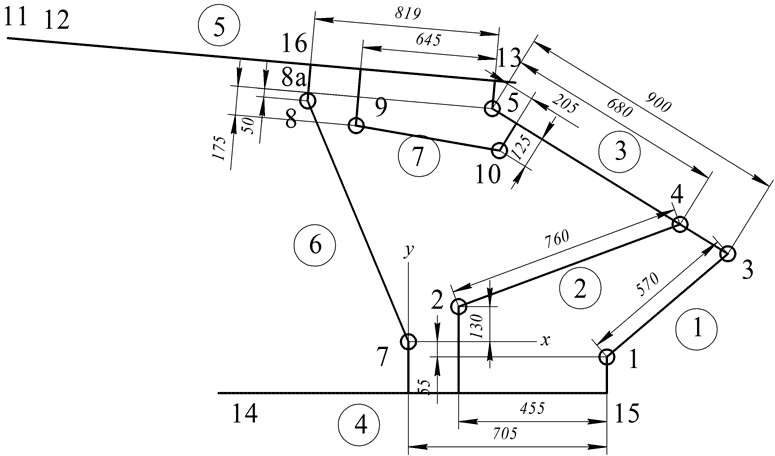
Рисунок 1 - Розрахункова схема для визначення кінематичних параметрів. |
Вихідними даними є конструктивні параметри кріплення:
Відстані між точками є обмеженнями, на основі яких складаються рівняння кінематики.
![]() , м;
, м;
![]() , м;
, м;
![]() , м;
, м;
![]() , м;
, м;
![]() , м;
, м;
![]() , м;
, м;
l54 = 0,68 м; l24 = 0,76 м; l13 = 0,57 м;
lC і lG змінні величини.
Координати нерухомих точок 7, 2, 1:
x7= 0; x2= 0,25; x1= 0,705;
y7 = 0; y2= 0,13; y1= -0,055.
Рішення.
На підставі обмежень складається система рівнянь:

Складена система рівнянь 14-го порядку вирішується за допомогою програмного забезпечення Mathcad.
На основі отриманої моделі кінематики побудуємо графік зміни координати x точки 1 від довжини гідростійками d = f(t), для трьох положень стабілізуючого гідродомкрата lG = 0,5; 0,7; 0,8 м.
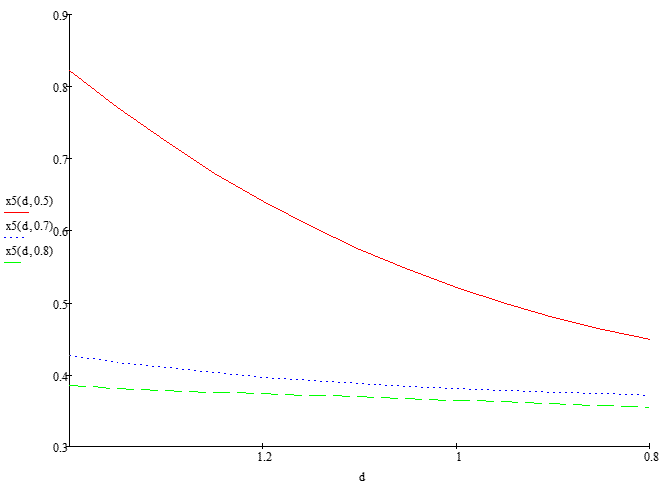
Рисунок 2 - Графік функції x5 = f(d,lG). |
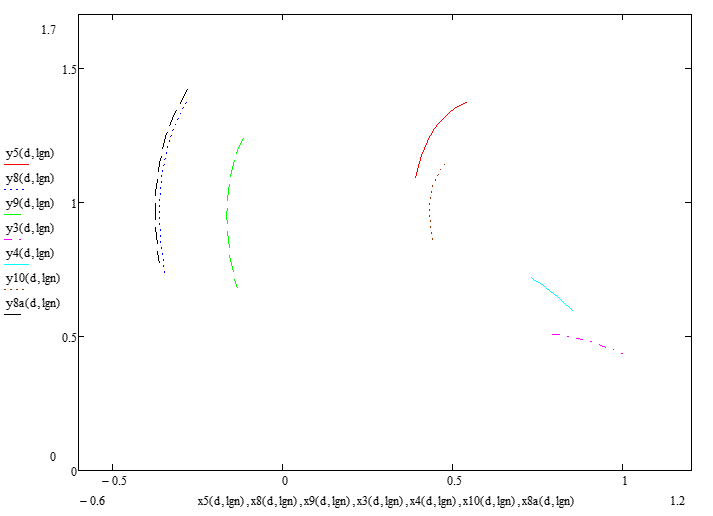
Рисунок 3 - Траєкторії точок 3,4,5,8,8а,9,10. |
Анімація процесу роботи кріплення. |
З графіка видно, що в процесі роботи базове перекриття зміщується в бік забою, що позитивно позначається на стані покрівлі.
На даному етапі виконання роботи розроблена спрощена модель механізованого кріплення на підставі наступних функціонально закінчених елементів:
З наведених ФЗЕ складаємо спрощену схему механізованого кріплення і насосної станції. Масу, що просторово переміщується замінюємо масою що переміщується лінійно.
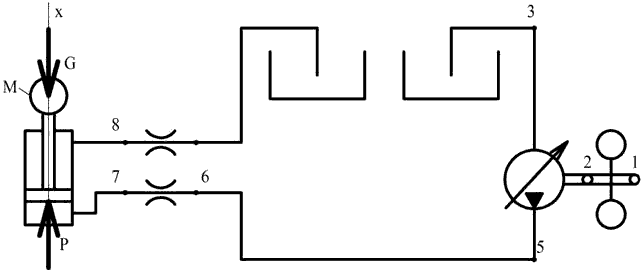
Рисунок 4 - Розрахункова схема. |
Опис розрахункової схеми:
Асинхронний електродвигун обертає насос через вал 2. Насос забирає робочу рідину з гідробака і нагнітає її в трубопровід 5-6. З трубопроводу, через дросель 6-7, рідина поступає в поршневу порожнину гідродомкрати. Дросель 6-7 імітує опір гідророзподільника. Тиск робочої рідини на поршень створює силу P, яка, долаючи силу G, витісняє рідину з штокові порожнини 8. Через дросель робоча рідина повертається в гідробака.
На підставі розрахункової схеми складаємо систему рівнянь:
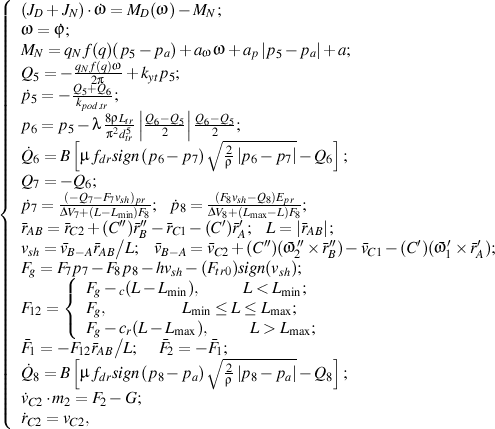
Де JD – момент інерції ротора електродвигуна;
JN – момент інерції насоса;
ω – кутова швидкість ротора електродвигуна;
MD(ω) – статична механічна характеристика асинхронного електродвигуна. МХ апроксимується трьома прямими лініями;
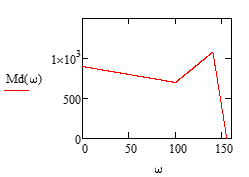
Рисунок 5 - Механічна характеристика |
МN –обертаючий момент на валу насоса;
qN – максимальний робочий об'єм насоса;
f(q) – параметр регулювання, -1 ≤ f(q) ≤ 1;
рa, p5 – тиск на вході і виході з насоса відповідно;
аw - коефіцієнт гідромеханічних втрат, що залежать від кутової швидкості;
аp - коефіцієнт гідромеханічних втрат, що залежать від тиску;
а – постійна гідромеханічних втрат;
Q5 – витрата робочої рідини на виході з насоса;
kyt – коефіцієнт об'ємних втрат насоса;
p5, p6 – тиск на вході і на виході з трубопроводу;
Q5, Q6 – витрата робочої рідини на вході і на виході з трубопроводу;
kpod.tr – коефіцієнт податливості трубопроводу з рідиною;
l – коефіцієнт втрат по довжині;
ρ – щільність робочої рідини;
Ltr – довжина трубопроводу;
dtr – діаметр трубопроводу;
Розрахункові параметри:

Еpr – наведений об'ємний модуль пружності трубопроводу з рідиною;
Еj – модуль пружності рідини;
Еst – модуль пружності матеріалу стінок трубопроводу;
dtr – товщина стінок трубопроводу;
Re – число Рейнольдса;
νj – кінематична в'язкість робочої рідини.
Q6, Q7, Q8 – витрати у відповідних точках дроселя;
В – параметр, що враховує інерційність стовпа рідини;
μ – коефіцієнт витрати, μ=ζ-0,5;
ζ –коефіцієнт гідравлічного опору;
fdr – площа прохідного перетину дроселя;
p7, p8 – тиск в точках підключення гідроциліндра;
Q7, Q8 – витрати в точках підключення гідроциліндра;
F7, F8 – площі поршня у відповідних порожнинах;
vsh – швидкість переміщення штока щодо склянки циліндра;
Δv7, Δv8 – «мертві» обсяги порожнин;
L, Lmin, Lmax – поточна, мінімальна та максимальна довжина циліндра (відстань AB); L визначається взаємним розташуванням з'єднуються МПП, а Lmin і Lmax– конструкцією гідроциліндра;
rC1, rC2 – радіус-вектори центрів мас МПП 1 і 2 в СК OXYZ;
C',C'' – матриці напрямних косинусів СК C1X'Y'Z' и C2X''Y''Z'', жорстко пов'язаних з МПП 1і 2 відповідно, в СК OXYZ, жорстко пов'язаної з забоєм;
vB-A – швидкість точки B щодо А в СК OXYZ;
vC1, vC2 – швидкості центрів мас МПП 1 и 2 в СК OXYZ;
ω'1, ω''2 – кутові швидкості МПП 1 і 2 в СК C1X'Y'Z' і C2X''Y''Z'' відповідно;
h – коефіцієнт демпфірування;
Ftr0 – постійна тертя;
Cc,Cr – жорсткості повністю зрушити і повністю розсунутого циліндра;
F1,F2 – реакції в гідроциліндри, додані до МПП 1і 2 в СК OXYZ;
Розрахункові параметри:
![]()
dp – діаметр поршня;
dsh7, dsh8 – діаметри штоків у відповідних порожнинах;
Дана система диференціальних рівнянь вирішується за допомогою програмного забезпечення Mathcad методом Рунге-Кутта.
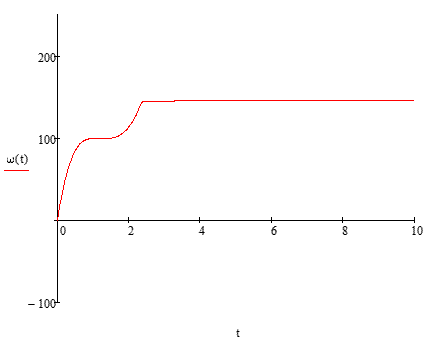
Рисунок 6 – Графическая зависимость угловой скорости |
З рис. 6 видно, що електродвигун розганяється протягом 2,4 с.
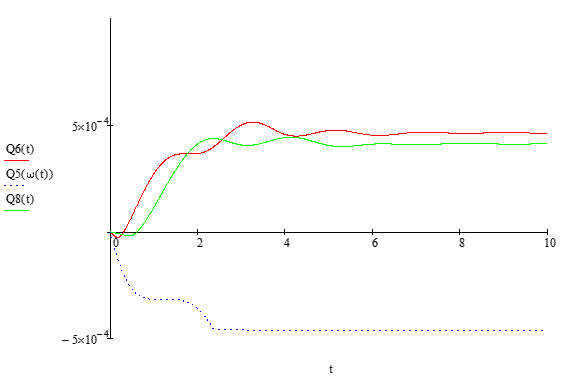 Рисунок 7 - Графічна залежність витрат в точках 5,6,8 від часу. |
Якщо рівняння вирішені вірно, то витрати у точках 5 і 6 мають бути однаковими за величиною і протилежними за знаком. Щоб перевірити це умова, необхідно проінтегрувати витрата за часом.
![]() , м3/с;
, м3/с;
![]() , м3/с;
, м3/с;
Різниця у величинах витрат 5 і 6 обумовлена пружним розширенням трубопроводу.
З рис. 7 видно, що в початковий момент часу в точках 6 і 8 витрата негативний. Це обумовлено дією сили G, проміжок часу розгону двигуна.
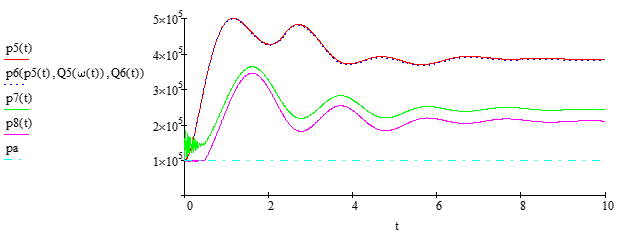
Малюнок 8 - Графічна залежність тиску в точках 5,6,7,8 від часу. |
Коливання тиску в точці 7 (рис. 8) викликані коливальною системою, що складається з маси m2 і гідроциліндра з рідиною, що грає роль пружини.
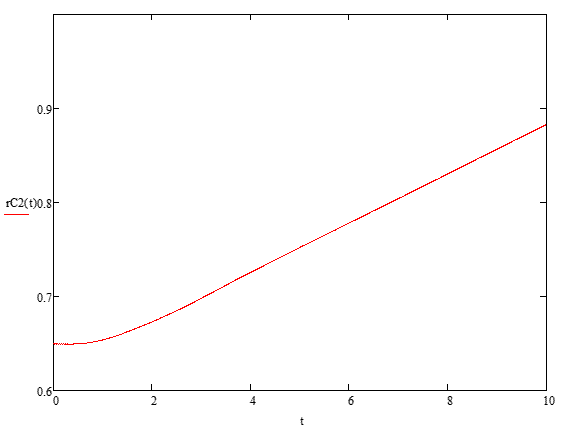
Малюнок 9 - Графічна залежність руху центру маси m2 від часу. |
У результаті проведеної роботи були розроблені математичні моделі для аналізу кінематичних параметрів кріплення, а також математична модель кріплень і системи гідроприводу на підставі функціонально закінчених елементів, що дозволяє вирішити завдання дослідження, розрахунку та оптимізації параметрів механізованих кріплень. Надалі ці математичні моделі увійдуть до складу САПР для розрахунку гірничих машин і комплексів.