Автореферат кваліфікаційної роботи магістра ДонНТУ
Крівцова Олександра Анатолійовича «Підвищення
функціональних показників автоматичного електроприводу шахтного стрічкового конвеєра на основі застосування тиристорного регулятора
роторного струму»
У даний час регульований електропривод магістрального стрічкового конвеєра шахти
комплектується асинхронним двигуном (АД) з фазним ротором і вибухобезпечними рідинними реостатими (ВРР). Такі електромеханічні
системи відрізняються складною конструкцією, наявністю великої кількості елементів,які переміщаються , додаткових (допоміжних)
електроприводів, значними габаритами, малим ресурсом і надійністю.
Тому існує актуальність вдосконалення подібних систем електроприводу на основі
застосування силових тиристорних регуляторів.
Метою є: підвищення ефективності та ресурсу електричного приводу магістрального
стрічкового конвеєра на основі застосування тиристорного регулятора роторного струму (ТРРС).
Для досягнення цієї мети необхідно вирішити наступні завдання:
1. Проаналізувати стрічковий конвеєр, як об'єкт автоматизації
2. Виконати аналіз способів і пристроїв управління параметрами АД
3. Обгрунтувати напрям дослідження
4. Виконати теоретичне дослідження за допомогою математичного або комп'ютерного
моделювання процесів в електроприводі з урахуванням раціонального удосконалення
5. Розробити функціональну і структурну схему вдосконаленого пристрою управління
приводу
6. Розробити принципову схему автоматизації і описати принцип її дії.
Стрічкові конвеєри знаходять широке застосування на об'єктах видобутку вугілля та інших корисних
копалин, у місцях, де робочий простір вкрай обмежений.
Магістральний стрічковий конвеєр служить для транспортування вугільної маси в горизонтальному і
пологонаклонном напрямку. Стрічковий конвеєр не тільки дозволяє транспортувати з шахти продукти видобутку, але і доставляти на місце
розробки необхідний інструмент та матеріали (це забезпечується завдяки передбачену можливість реверсування). Крім зручності
експлуатації у такого обладнання є ще одна велика перевага - його покупка та встановлення обходиться дешевше, ніж рейкова відкатка, -
в основному, з-за зниженого енергоспоживання і відсутності необхідності обладнати колії.
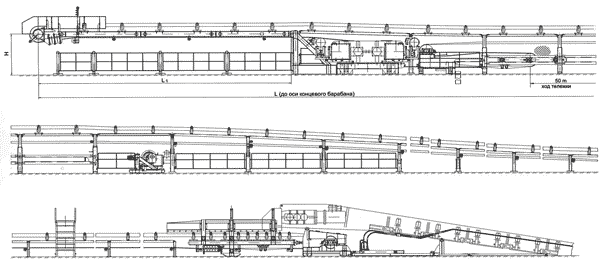 Рисунок 1. - Загальний вид стрічкового конвеєра ЛТ800
Рисунок 1. - Загальний вид стрічкового конвеєра ЛТ800
Переважна більшість стрічкових конвеєрів оснащено нерегульованими за швидкістю
електроприводами на основі асинхронного двигуна (АД) з фазним ротором. Відсутність ефективних засобів регулювання швидкості обмежує
функціональні можливості приводу, обумовлює підвищений знос його елементів (високий рівень прискорень, динамічних зусиль при пуску).
Інтенсивний розгін робочого органу гірничої машини частенько стає причиною травматизму обслуговуючого персоналу. Тому актуальність
завдання є створення регульованого електропривода гірських машин.
Автоматизація дозволяє контролювати пуск, роботу і зупинку конвеєра, а також у разі
аварійної ситуації дозволяє швидко знайти і усунути причину аварії, збільшити продуктивність конвеєра.
На даний момент розроблена величезна кількість систем автоматизації, які комплексно
регулюють роботу конвеєра. До даних видів апаратура відноситься апаратура САУКЛ, УКІ, АУК-1М.
Охарактеризуємо коротко кожну з апаратури:
АУК - 1М [12,13]
Призначення
Комплекс (далі апаратура) АУК - 1М призначений для автоматизованого управління
стаціонарними та пів стаціонарними нерозгалужене конвеєрними лініями, що складаються з стрічкових і скребкових конвеєрів
(із загальною кількістю їх до 10). При вживанні комплексу АУК - 1М для управління розгалуженими конвеєрними лініями з числом відгалужень
до трьох, кожне двигун управляється як самостійна нерозгалужене лінія.
Сфера застосування
Апаратура АУК - 1М розрахована на застосування в підземних виробках шахт, небезпечних по газу та пилу,
застосовувається на збагачувальних фабриках та інших підприємствах.
УКІ [12,13]
Призначення
Пристрій УКІ призначений для подачі сигналу на відключення стрічкового конвеєра при
спрацьовуванні кабель-троссових вимикачів або датчиків контролю сходу стрічки з автоматичним поданням на блоці індикації інформації
про причину відключення конвеєра і номер датчика, який спрацював. Пристрій УКІ
дозволяє передати на пульт оператора інформацію по кожному конвеєру лінії.
АПМ
Електрична схема апарату забезпечує:
• плавний пуск робочого органу конвеєра за заданою програмою;
• зміна тривалості розгону робочого органу конвеєра;
• динамічне гальмування електропривода після його відключення;
• зміна гальмівного моменту;
• реверс електроприводу за допомогою розмикання магнітного пускача;
• захист силових тиристорів апарату від перегріву, від струмів короткого замикання, від втрати
управління силовими тиристорами при зникненні відчиняли імпульсів в одному або декількох каналах, від втрати фази вхідної напруги;
• індикацію про включений (вимкнений) стан апарату і про спрацьовування захисту. [10]
Апарат АПМ забезпечений захистом від не включення тиристорів СТК та їх перегріву, від втрати фази
вхідної напруги, від струмів короткого замикання. В апараті передбачені самоконтроль справності системи управління тиристорами,
сигналізація про включення (виключення) стан апарату та спрацювання захисту, пристрій забезпечення працездатності апарату при
реверсі фаз напруги. Керований програмний пуск електропривода машини здійснюється за допомогою одноконтурною, замкнутої за швидкістю
системи регулювання шляхом фазового зміни величини па, що подається двигун напруги. [11]
САУКЛ
Основні функції апаратури САУКЛ це:
1. Централізоване автоматизоване управління розгалуженими й нерозгалужене конвеєрними
лініями, а також окремими конвеєрами, що входять або не входять до складу лінії, здійснюване оператором (диспетчером) з центрального
пульта управління і забезпечуючи автоматичне виконання заданої послідовності операцій пуску і зупинки механізмів лінії з
дотриманням необхідних захисних відключень і блокувань
2. Місцеве управління конвеєром, що здійснюється з блоку управління конвеєром
3. Телекерування супутнім допоміжним обладнанням
4. Створення та редагування на пульті управління мнемосхеми конвеєрних ліній у відповідність
з конфігурацією транспортної мережі конкретного підприємства.
5. Автоматична реєстрація та збереження на пульті управління інформації про роботу конвеєрів
(Ліній) та системи управління із захистом від внесення змін.
6. Двостороннього симплексного телефонний зв'язок між диспетчером і пунктами установки блоків
управління конвеєрами
7. Управління конвеєром з многодвігательним приводом
8. Контроль процесу зниження швидкості при зупинці конвеєра і його захисне відключення
9. Контроль та захист від несанкціонованого пуску конвеєра в разі прямого впливу на
магнітний пускач його двигуна
10. Пуск конвеєрної лінії (частки лінії) або дозапуск необхідної кількості конвеєрів
11. Оперативну зупинку конвеєрної лінії, частки лінії, окремого конвеєра
Для управління стрічковим конвеєром однієї системи управління недостатньо, потрібно сам пристрій
управління плавністю пуску і швидкістю АД. Із всіх способів регулювання роботи АД в стрічкових конвеєрах знайшло застосування регулювання
роторного струму.
Регулятор роторного струму призначений для забезпечення ступеневої або плавного регулювання
швидкості АД з фазним ротором. Він дозволяє отримувати сімейство штучних механічних характеристик і дозволяє регулювати швидкість в
широкому діапазоні.
Для регулювання роторного струму використовується безліч пристроїв. Одним з них є
реостатному схема управління розгоном приводного АД. Яка в свою чергу може бути реалізована у вигляді
ВРР . Проте досвід експлуатації їх (рис 2) свідчить про їх невисокому ресурсі і громіздкість. Практика
експлуатації виявила низку недоліків, пов'язаних із застосуванням рідинних реостатів. До них відноситься їхня низька надійність, обумовлена
застосуванням значної кількості переміщуваних елементів силового ланцюга: електродвигуни ножів (4) реостата, насоса (7,8) для перекачування
електроліту (1) і калорифера (9 -11) для його охолодження. [6]
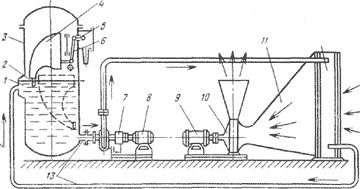 Рисунок 2 - Склад ВРР
Рисунок 2 - Склад ВРР
Наступним варіантом реостатному схеми, є застосування реостатних опорів
включених в ланцюг ротора АД . Це дозволяє отримувати сімейство штучних механічних характеристик і дозволяє регулювати
швидкість в широкому діапазоні.
Принцип дії наступний: в ланцюзі ротора існують ступені пускових реостатів RI ... RIII,
підключенням яких здійснюється переказ двигуна з одного штучної механічної характеристики на іншу (рисунок 4) і в остаточному
підсумку - на природну (ЕМХ), на якій (при досягненні рівності моменту двигуна і моменту опору), двигун досягає своєї
робочої точки. Пускові реостати підключаються за допомогою потужних контактів пускачів КМ1 ... КМ4 в наступній послідовності: замикається
КМ1.1 (чим забезпечується максимальний опір), потім КМ2.1 і так далі до КМ4.1, після чого двигун виходить на ЕМХ. Також схема
забезпечує гальмування протівовключеніем - включенням в ланцюг ротора реостата Rпр. При включенні двигуна підключені всі опору, і
ми маємо саме большеніе значення пускового моменту і найменшу частоту обертання двигуна (рисунок 3 характеристика 1). При замиканні
короткозамикатели КМ1.1 ми переходимо з точки 1 `в точку л характеристики 2 далі вже розгін відбувається за характеристикою 2 і так далі
поки двигун не перейде в точку про на ЕМХ і по ЕМХ набере номінальний момент і номінальну швидкість.
реостатному схема регулює скорсть двигуна східчасто у вузьких прибудовах, які огранічіваються
опорами включеними в ланцюг ротора. Тим більше застосування реостатів знижує надійність схеми управелнія.
Рисунок 3 - Принцип роботи АД з включеними в ланцюг ротора реостатними опорами
(Анімація перша: обсяг - 34.4 кб;
розмір - 203х600; кількість кадрів - 8; затримка між кадрами 1 с; затримка між останнім та першим кадром - 3 с; кількістьо циклів
повторення - безкінечно. Анімація друга: обсяг - 100 кб; розмір - 684х600; кількість кадрів - 8; затримка між кадрами 1 с; затримка між
останнім та першим кадром - 3 с; кількістьо циклів повторення - безкінечно
У той же час, існує можливість поєднання принципів реостатного управління з
регулюванням роторного струму на основі застосування безконтактних (тиристорних) регуляторів і одного ступеня роторних резисторів. В якості
регулятора може бути застосований трифазний тиристорний комутатор, що складається з трьох пар встречнопараллельно з'єднаних тиристорів [7] з
послідовно включеними активними опорами, або мостовий випрямляч, навантажений активним опором з паралельним
тиристорним ключем [8]. В останньому випадку усувається залежність симетрії фазних роторних струмів асинхронного двигуна від можливої
неоднаковості величин роторних опорів у фазах, що більш прийнятно для забезпечення високого ресурсу АТ. [6].
реостатному схема з тиристорним регулятором роторного струму [4], реалізовану в даний час
підприємством Estel Plus AS (Естонія) [8] у комплектному електроприводі UPTF [2]. Схема управління пусковим пристроєм наведена на рисунку 5.
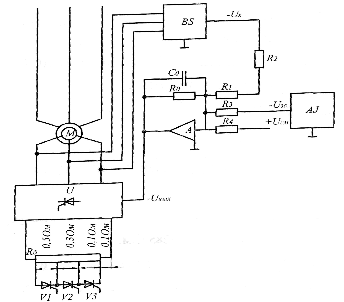 Рисунок 5 - Силова схем приводу з пристроєм UPTF і елементами системи управління
Рисунок 5 - Силова схем приводу з пристроєм UPTF і елементами системи управління
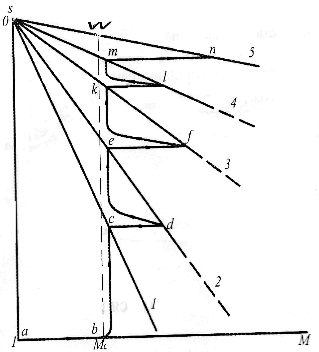 Рисунок 6 - Пускова діаграма електроприводу:
Рисунок 6 - Пускова діаграма електроприводу:
1,2, ..., 5 - статичні механічні характеристики;
a-b-c-d-...-m-n-ωc - динамічна характеристика
Безумовною перевагою такого приводу слід вважати загальну для всіх трьох фаз ротора АД ланцюг
активного роторного опору (що в принципі виключає перекіс роторних струмів).
Регулювання моменту АТ на будь-який з штучних механічних характеристик проводиться
за допомогою фазової зміни роторних струмів керованим випрямлячем (U). Особливість роботи цього випрямляча пов'язана з нестабільною
частотою роторних ЕРС. Це обумовлює актуальність завдання стабілізації величини кута? відмикання тиристорів випрямляча в діапазоні частот
від 50 Гц (пуск АД) до 1,5 Гц (вихід АТ на номінальну швидкість).
Дане завдання вирішується схемою системи імпульсно-фазового управління, в якій опорне напруга
U16, що визначає величину кута? відмикання тиристорів, у свою чергу, задається в пропорції, зворотного частоті ЕРС ротора Uc (рис. 7) [3].
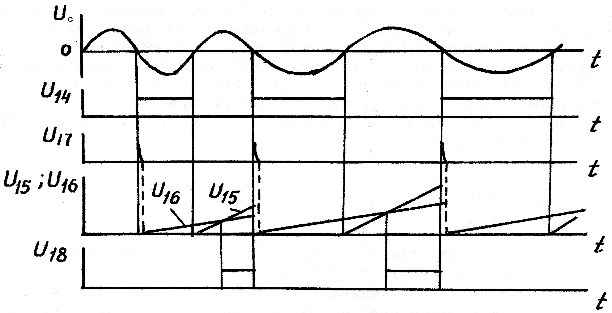 Рисунок 7 - Діаграма напруги СІФК по АС 1504756
Рисунок 7 - Діаграма напруги СІФК по АС 1504756
Силова напівпровідникова схема приводу відрізняється компактністю і легко реалізується в рудничному
вибухобезпечному корпусі. Однак, стосовно до шахтному стрічкового конвеєру порівняно невеликої протяжності (близько 500 м) вона може
бути ще більш спрощена (рис. 8). У цьому випадку ТРРС представляє схему тиристорного комутатора на трьох парах зустрічно-паралельно
з'єднаних тиристорів, включених на резисторний навантаження. Переклад двигуна приводу конвеєра на природну механічну характеристику
здійснюється контакторним короткозамикачем КМ1 ланцюга ротора.
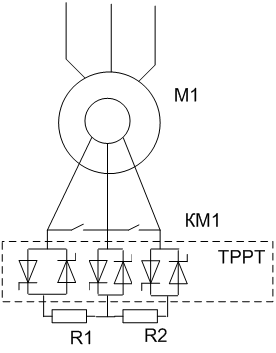 Рисунок 8 - Адаптація схеми електропривода з тиристорним регулятором роторного струму (ТРРС) до умов застосування в
складі шахтного стрічкового конвеєра (КМ1 - контакторний короткозамикачем)
Рисунок 8 - Адаптація схеми електропривода з тиристорним регулятором роторного струму (ТРРС) до умов застосування в
складі шахтного стрічкового конвеєра (КМ1 - контакторний короткозамикачем)
Проте виникає наступна проблема синхронізація роботи системи імпульсно-фазового управління
для тиристорного регулятора роторного струму. Можливо кілька способів рішення даної задачі. Одним з них є трансформаторна
синхронізації [5] . Однак не сталість частоти цих ЕРС обумовлює технічне протиріччя, відповідно до якого не представляється
можливим застосувати засоби трансформаторної синхронізації, як це зазвичай робиться при постійній частоті напруги (ЕРС) синхронізації.
Крім цього, необхідно узгодити величини синхронізуючого напруги з напругою живлення елементів системи управління приводом, в
зокрема, СІФК.
Прийнятним вирішенням цього технічного протиріччя є виконання вузла синхронізації на
основі застосування трифазного дільника напруги (мал. 9). Оскільки резистори цього дільника з'єднані в «зірку», її потенціал (рівний нулю)
узгоджується з потенціалом спільного висновку ланцюга живлення електронних пристроїв системи управління при-водом (мається на увазі, що резистори R1-R3
підключені першими висновками до клем фазних ЕРС ротора АД). Співвідношення опорів резисторів R1-R3 і R4-R6 може бути вибрано таким,
що падіння фазних напруг на резистора R4-R6 будуть відповідні за амплітудами з величиною позитивного напруги живлення електронних
пристроїв системи управління. Таким чином, застосування трифазного резисторний дільника напруги не суперечить проблематики
узгодження величини напруги живлення електронних пристроїв системи управління і більш високих за величиною (порядку 500 В при напрузі
статора 660 В) ЕРС ротора АД.
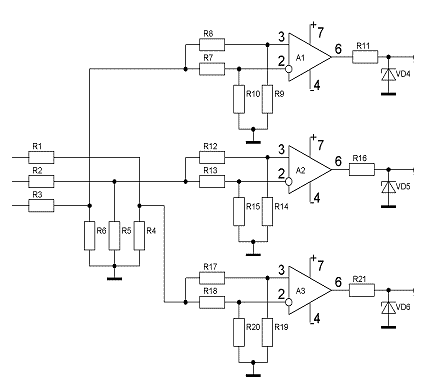 Рисунок 9 - Схема вузла синхронізації СІФК на основі трифазного дільника напруги
Рисунок 9 - Схема вузла синхронізації СІФК на основі трифазного дільника напруги
Компаратори А1-А3 виконують роль нуль-органів, перетворюючи вхідні синусоїди напруги
(Синхронізованих з ЕРС ротора) в прямокутні імпульси. Придушення негативних складових вихідних імпульсів компараторів (виконаних
на операційних підсилювачах) здійснюється за допомогою діодів VD4-VD6.
Таким чином, запропоноване технічне рішення відрізняється простотою, дозволяє виконати завдання
синхронізації з Сифу трифазної системи ЕРС високого рівня і змінюється частоти, не вимагає трансформаторних, яких інших (наприклад,
оптрони) технічних засобів гальванічної розв'язки.
Наступним етапом кваліфікаційної роботи магістра буде вивчення даної схеми управління,
виявлення плюсів і мінусів у ході випробувань даної схеми. Після випробувань буде зроблено висновок про право існування даної схеми або її повної
модернізації.
Бібліографічний список
1. Стадника М.І. Довідник з автоматизації шахтного конвеєрного транспорту / [Стадник М.І.,
Ільюшенко В.Г., Єгоров С.І. та інщі] за ред. Стадника М.І. – К.: Техніка, 1992.- С. 63-79
2. Борисенко В.Ф. Электротехнические системы транспортных механизмов / [Борисенко В.Ф.,
Чепак А.А., Сидоров В.А., и др.] под ред. Борисенко В.Ф. – Донецк.: НПФ «МИДИЭЛ», 2007. С. 83-89
3. Маренич К.Н. А.С. 1504756 СССР, МКИ3Н02М5/22 Устройство для импульсно-фазового управления
тиристорными регуляторами напряжения / К.Н.Маренич, И.Т.Сидоренко, С.В.Дзюбан, В.Н. Пименов (СССР). - №4341676/07; заявлено 11.12.1987;
опубликовано 30.08.1989. Бюл. №32
4. Кривцов А.А. Севергеоэкотех-2009: труды Х междунар. конф., 18-20. 03. 2009 г., Ч.1.
Кривцов А.А / Ухта: УГТУ, 2009.- С. 78-80.
5. Кривцов А.А. Севергеоэкотех-2010: труды ХI междунар. конф., 18-20. 03. 2009 г., Ч.1.
Кривцов А.А. / Ухта: УГТУ, 2010.- С. 76-87.
6. Малиновский А.К. Автоматизированный электропривод машин и установок шахт и рудников.
Малиновский А.К. / М.: Недра, 1987.- 277с.
7. Маренич К.Н. А.С. 1824835 СССР, МКИ В65С23/00 Способ управления пуском шахтного ленточного
конвейера и устройство для его осуществления. К.Н. Маренич, С.В. Дзюбан, И.Т. Сидоренко и др. (СССР), опубл. 05.02.1990
8. Estel Plus AS Устройства УПТФ (ЭПТФ). Рекламная информация. [Електронний ресурс]
/ Estel Plus AS/ - Режим доступу до статті www.estel.ee
9. АОЗТ "Инстройсервис" Состав аппаратуры САУКЛ [Електронний ресурс] / АОЗТ "Инстройсервис" /
- Режим доступу до статті instroyservis.com
10. Ляшенко Н. І. Склад АПМ / Н. І. Ляшенко, А. В. Панасенко – інженери
(шахта ім. Бажанова), В. Н. Зеленецкий, інженер (ВАТ "Автоматгормаш")
11. БИКОВСЬКИЙ А. П. Состав АПМ УДК 622.647.25:621.31: / А. П. БИКОВСЬКИЙ, В. Н. ЗЕЛЕНЕЦКИЙ
, інженери, И. З. КИБРИК, канд. техн. наук (Аатоматгормаш), І. Т. СИДОРЕНКО, К. Н. МАРЕНІЧ, кандидати техн. наук (ДонНТУ)/
12. Батицкий В.А., Автоматизация технологических процессов и АСУ ТП в горной промышленности:
Учеб. для техникумов. / Батицкий В.А / – 2-е изд., перераб. и доп. – М.: Недра, 1991. – 303 с.: ил.
13. Малиновский А.К. Автоматизирований электропривод машин и установок шахт и рудников: Учебник
для вузов. / Малиновский А.К. / – М: Недра, 1987. – 202 с.
Примітка
При написанні даного автореферату магістерська робота ще не завершена. Дата остаточного
завершення роботи: кінець 2010 року. Повний текст роботи та матеріали по темі можуть бути отримані у автора або його наукового керівника
після зазначеної дати.
|
