
С цель исключения рывков в сбегающей ветви ленты шахтного магистрального ленточного конвейера при пуске обычно применяют реостатную схему управления разгоном его приводного асинхронного двигателя (АД). Однако опыт эксплуатации взрывобезопасных жидкостных реостатов (ВЖР) свидетельствует об их невысоком ресурсе и громоздкости. Наличие дополнительных электроприводов насоса и вентилятора (устройство охлаждения электролита) обуславливают снижения надежности реостата [1].
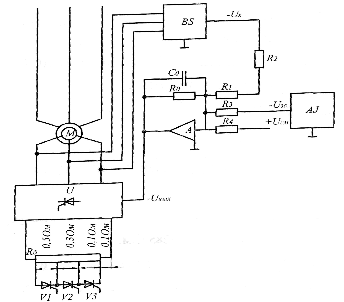
Более эффективным решением следует считать реостатную схему с тиристорным регулятором роторного тока, реализованную в настоящее время предприятием Estel Plus AS (Эстония) в комплектном электроприводе UPTF [2]. Схема управления пусковым устройством приведена на рисунке 1.
На выходы усилителя А поступают сигналы: напряжение смещения Uсм, напряжение –Us отрицательной обратной связи по скольжению двигателя от датчика скольжения BS (блок синхронизации), - Uзс задание скорости двигателя от задатчика интенсивности AJ. Выходное напряжение Uвых действует, с одной стороны, на изменения угла управления силовыми тиристорами трехфазного мостового выпрямителя UPTF, с другой стороны – на блок логики, вырабатывающий в определенные моменты времени импульсы для срабатывания шунтирующих тиристоров. UPTF обоих двигателей снабжены индивидуальными системами управления.
Пуск привода осуществляется включением автоматического выключателя и контактов в цепи статора приводных АД. При этом на выходе суммирующего усилителя А каждого UPTF формируется напряжение Uвых согласно операторному уравнению
где KA1,2, KA3, KA4, - коэффициент усиления усилителя по отношению к сопротивлениям входных резисторов R1, R2, R3 и R4 соответственно:

TA – постоянная интегрирования усилителя,TA=R0×C0 .
Если пренебречь постоянной TA имеющей малую величину (она будет учтена в дальнейшем), то равенство (1) запишется так:

где Uз.с. – линейная функция времени, определяющая темп разгона двигателя.
Таким образом, перевод двигателя на более жесткие характеристики (рисунок 2) осуществляется шунтированием соответствующих элементов роторного сопротивления посредством тиристоров V1-V3.
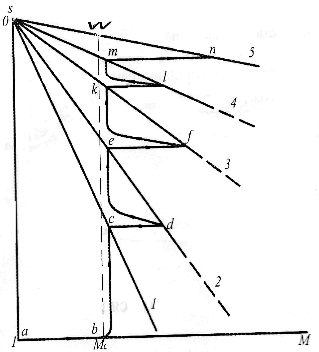
Безусловным преимуществом такого привода следует считать общую для всех трёх фаз ротора АД цепь активного роторного сопротивления ( что в принципе исключает перекос роторных токов).
Регулирования момента АД на любой из искусственных механических характеристик производится по средством фазового регулирования роторных токов управляемым выпрямителем (U).
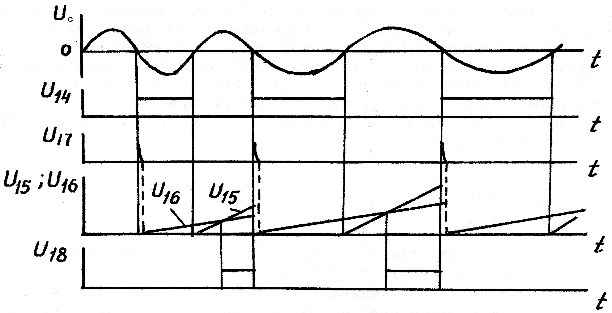
Особенность работы этого выпрямителя связана с нестабильной частотой роторных ЭДС. Это обуславливает актуальность задачи стабилизации величины угла отпирания тиристоров выпрямителя в диапазоне частот от 50 Гц(пуск АД) до 1,5 Гц (выход АД на номинальную скорость).
Данная задача решается схемой системы импульсно-фазового управления, в которой опорное напряжение (U16), определяющее величину угла отпирания тиристоров, в свою очередь, задаётся в пропорции, обратной частоте ЭДС ротора (Uc) (рисунок 3) [3].
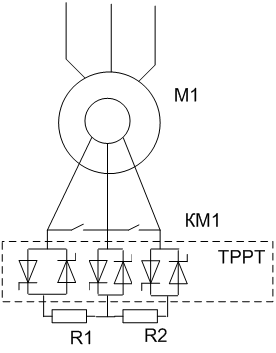
Силовая полупроводниковая схема отличается компактностью и легко реализуется в рудничном взрывобезопасном корпусе. Однако, применительно к шахтному ленточному конвейеру сравнительно небольшой протяженности (порядка 500 м) она может быть еще больше упрощена (рисунок 4).
1. Довідник з автоматизації шахтного конвеєрного транспорту [Стадник М.І., Ільюшенко В.Г., Єгоров С.І. та інщі] за ред. Стадника М.І. – К.: Техніка, 1992.-С63-79
2. Электротехнические системы транспортных механизмов[Борисенко В.Ф., Чепак А.А., Сидоров В.А., и др.] под ред. Борисенко В.Ф. – Донецк.: НПФ «МИДИЭЛ», 2007. С83-89
3. А.С. 1504756 СССР, МКИ3Н02М5/22 Устройство для импульсно-фазового управления тиристорными регуляторами напряжения/ И.Т.Сидоренко, К.Н.Маренич, С.В.Дзюбан, В.Н. Пименов (СССР). - №4341676/07; заявлено 11.12.1987; опубликовано 30.08.1989. Бюл. №32