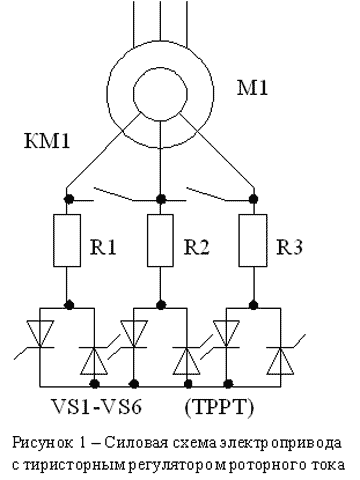

Улучшение эксплуатационных характеристик асинхронных электроприводов шахтного магистрального ленточного и одноконцевой откатки может быть достигнуто на основе при-менения тиристорного регулятора роторного тока (ТРРТ). Его силовая схема содержит тири-сторный коммутатор (а трёх парах встречно-параллельно соединённых тиристоров), включенных в цепь ротора асинхронного двигателя (АД) с резисторной нагрузкой (рис 1). Перевод двигателя привода конвейера на естественную механическую характеристику по оконча-нии разгона осуществляется контакторным короткозамыкателем КМ1 цепи ротора.
Предложенная структура привода позволяет получать семейство искусственных механических характеристик 1 – 3 (рис 2) двигателя М1 с меньшими значениями максимального момента в сравнении с естественной механической характеристикой (ЕМХ) двигателя (при фазовом регулировании тиристоров ТРРТ). При наличии замкнутой по скорости системы ав-томатического управления (рис.3) это позволяет реализовывать управляемый разгон двига-теля по заданной диаграмме изменения угловой скорости ротора.
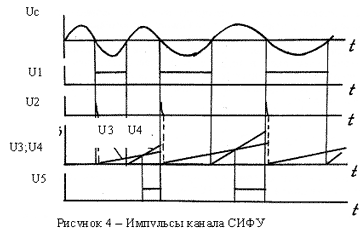
Специфика применения тиристорного коммутатора не в статорной, а в роторной цепи АД требует соответствующей корректировки схемы системы импульсно-фазового управле-ния тиристорами с учетом того, что частота роторной ЭДС АД будет изменяться в процессе разгона АД в пределах от 50 Гц до 1,5 - 2 Гц. Способ формирования углов фазовой задерж-ки отпирания тиристоров ТРРТ, учитывающий указанные особенности, рассмотрен в [1] и иллюстрируется диаграммами напряжений канала системы импульсно-фазового управления (рис 4) На рисунке: Uс – синхронизирующее напряжение, пропорциональное фазной ЭДС ротора АД; U1 – меандры, соответствующие отрицательным полуволнам напряжения Uс; U2 – передние фронты меандров U1; U3 и U4 – сравниваемые пилообразные импульсы, форми-руемые в интервалах отсутствия импульсов, соответственно, U2 и U41; U5 – импульсы вы-хода канала СИФУ.

Условием функционирования СИФУ является синхронизация её каналов с полуволнами фазных ЭДС ротора АД. Однако, не постоянство частоты этих ЭДС обусловливает техническое противоречие, в соответствии с которым не представляется возможным приме-нить средства трансформаторной синхронизации, как это обычно делается при постоянной частоте напряжения (ЭДС) синхронизации. Кроме этого, необходимо согласовать величины синхронизирующего напряжения с напряжением питания элементов системы управления приводом, в частности, СИФУ.
Приемлемым решением этого технического противоречия является выполнение узла синхронизации на основе применения трехфазного делителя напряжения (рис.2). Поскольку резисторы этого делителя соединены в «звезду», её потенциал (равный нулю) согласуется с потенциалом общего вывода цепи питания электронных устройств системы управления приводом (имеется в виду, что резисторы R1-R3 подключены первыми выводами к клеммам фаз-ных ЭДС ротора АД). Соотношение сопротивлений резисторов R1-R3 и R4-R6 может быть выбрано таким, что падения фазных напряжений на резисторах R4-R6 будут соразмерны по амплитудам с величиной положительного напряжения питания электронных устройств системы управления. Таким образом, применение трёхфазного резисторного делителя на-пряжения не противоречит проблематике согласования величины напряжения питания элек-тронных устройств системы управления и более высоких по величине (порядка 500 В при напряжении статора 660 В) ЭДС ротора АД.
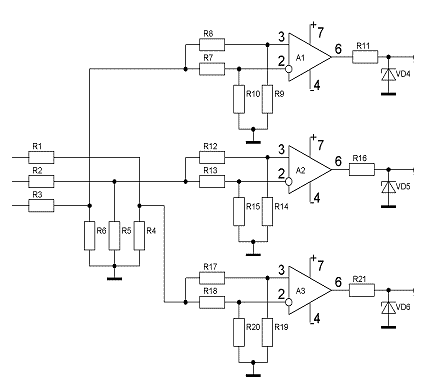
Компараторы А1-А3 выполняют роль нуль-органов, преобразуя входные синусоиды напряжений (синхронизированных с ЭДС ротора) в прямоугольные импульсы. Подавление отрицательных составляющих выходных импульсов компараторов (выполненных на операционных усилителях) осуществляется посредством диодов VD4-VD6.
Таким образом, предложенное техническое решение отличается простотой, позволяет выполнить задачу синхронизации с СИФУ трёхфазной системы ЭДС высокого уровня и из-меняющейся частоты, не требует трансформаторных, либо иных (например, оптронных) тех-нических средств гальванической развязки.
1. Севергеоэкотех-2009: труды Х междунар. конф., 18-20. 03. 2009 г., Ч.1.- Ухта: УГТУ, 2009.- С. 78-80.