
Регулятор частоты вращения двигателя, стабилизирующий его скорость при изменении нагрузки, существенно повышает эксплуатационные возможности таких бытовых приборов, как электродрель, электропила, кухонный комбайн и т. д. Известен простой и эффективный однополупериодный регулятор коллекторного электродвигателя последовательного возбуждения, стабилизирующий скорость вращения за счет обратной связи по величине противо-ЭДС, возникающей на роторе двигателя и зависящей от его нагрузки. К сожалению, такому регулятору свойствен существенный недостаток — в нем используется высокочувствительный тиристор с током открывания менее 100 мкА. Подобрать ему замену практически невозможно. В публикуемой статье автор предлагает свой вариант схемотехнического решения регулятора, в котором сняты ограничения на параметры тиристора.
Прежде чем перейти к описанию модернизированного регулятора электропривода, остановимся коротко на принципе действия простого регулирующего устройства [1].
Его принципиальная схема приведена на рис, 1, Это — мост, левое плечо которого образовано делителем напряжения сети R1 — R2C1 --VD1, а правое--тиристором VS1 и двигателем М1. Управляющий переход тиристора включен е диагональ моста. Открывающий тиристор сигнал представляет собой сумму складывающихся в противофаэе сигналов; напряжения сети, устанавливаемого движком резистора R2f и противо-ЭДС с ротора электродвигателя- При неизменности напряжений мост сбалансирован и частота вращения двигателя также не меняется. Увеличение нагрузки на валу двигателя снижает его обороты и уменьшает соответственно величину противо-ЭДС, что приводит к разбалансу моста, В результате сигнал, поступающий на управляющий переход тиристора, возрастает, и в следующем положительном полупериоде он открывается с меньшей задержкой, увеличивая таким образом подводимую к двигателю мощность. В итоге снижение частоты вращения двигателя из-за увеличения нагрузки оказывается существенно меньшим, чем было бы при отсутствии регулятора.
В данном случае регулирование получается весьма устойчивым, так как рассогласование устраняется в каждом положительном полупериоде сетевого напряжения. Более всего эффект стабилизации выражен при малой и средней частотах вращения двигателя. С повышением регулировочного напряжения на резисторе R2 и увеличением числа оборотов двигателя степень поддержания неизменной скорости двигателя ухудшается. Тиристор VS1 в регуляторе выполняет две функции; пороговую по сигналу рассогласования моста и силовую — по коммутируемому току через двигатель. Диоды VD1, VD2 обеспечивают однополупериодный режим работы устройства^ поскольку сравнение напряжений от резистора R2 и противр-ЭДС возможно только при отсутствии тока через двигатель. Конденсатор С1 в делителе напряжения сети расширяет зону регулирования в сторону малых скоростей, а конденсатор С2 в цепи управляющего электрода тиристора понижает чувствительность регулятора к искрению щеток двигателя.
Однополупериодный режим двигателя приводит к снижению отдаваемой мощности. Для достижения максимальных мощности и скорости следует зашунтировать тиристор, нажав на кнопку SA1. В этом случае на двигатель будут подаваться обе полуволны сетевого напряжения. Как уже указывалось, основной недостаток рассмотренного регулятора состоит в необходимости использования высокочувствительного тиристора с током открывания менее 100 мкА, который практически нечем заменить. Введение транзисторного аналога тиристора позволяет снять ограничения на параметры открывания VS1 при сохранении тех же регулировочных характеристик. Установка стабилитрона в делитель напряжения сети понижает изменения скорости двигателя при колебаниях питающего напряжения.
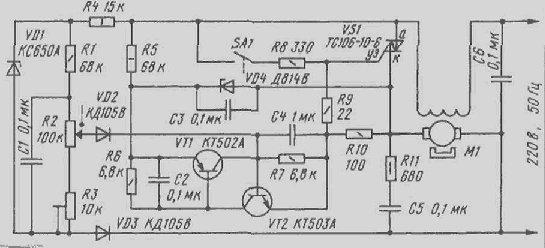
Схема модернизированного регулятора представлена на рис, 2. Как и рассмотренное выше устройство, регулятор работает только при положительной полуволне сетевого напряхения. Напряжение рассогласования моста через диод VD2 и резистор R10 поступает к переходу база — эмиттер транзистора VT2, Чувствительность данного устройства и качество его регулирования выше, так как напряжение открывания транзисторов существенно меньше* чем у тиристоров. Ток управления по аналогии с регулятором, представленным на рис. 1, выбран равным 0,1 мА путем шунтирования перехода транзистора резистором R7.
Если напряжение, поступающее с движка резистора R2, выше напряжения на роторе двигателя, то транзистор VT2 открывается и открывает VT1, Эти приборы образуют аналог тиристора и при включении формируют мощный импульс разрядного тока конденсатора СЗ, который через токоограничивающий резистор R9 поступает на управляющий электрод симистора VS1, Симистор включается, на двигатель подается напряжение, и число его оборотов увеличивается. Если же напряжение на резисторе R2 ниже, чем на роторе двигателя, симистор не включится, число оборотов сократится.
Накопительный конденсатор СЗ заряжается от сети через резистор R5. Стабилитрон VD4 ограничивает напряжение на конденсаторе на уровне, несколько превышающем возможное напряжение открывания симисторов или тиристоров. Кроме того, стабилитрон исключает появление обратного напряжения на транзисторах усилителя.
Конденсатор С4, помимо снижения помех от искрения щеток двигателя, выполняет функцию интегрирования в цепи обратной связи. Увеличение его емкости повышает устойчивость регулятора, что бывает нужно в случае плохого контакта щеток, сопровождающегося их сильным искрением, или при установке предельно малых скоростей, когда может возникнуть так называемое "качание" оборотов. Однако следует помнить, что с увеличением емкости конденсатора С4 динамические характеристики привода ухудшаются и качество стабилизации скорости снижается. Постоянная цепи R5C3 такова, что конденсатор СЗ заряжается быстрее заряда конденсатора C4. Это сделано для того, чтобы в любой возможный момент открывания транзистора VT2 на конденсаторе СЗ уже присутствовало рабочее напряжение, необходимое для выработки пускового импульса. Иногда такое условие может быть нарушено при резком разбалансе моста — при заторможенном двигателе (низкое сопротивление ротора) и максимальном напряжении на движке резистора R2 (большой открывающий ток с делителя). В результате транзисторы открываются до завершения зарядки конденсаторе СЗ, напряжение на нем отсутствует, импульс разрядного тока не формируется. Ток, протекающий через резистор R5, достаточен для удержания открытого состояния транзисторов, но мал для включения симистора , и поэтому двигатель не вращается. Подобную возможность можно расценить как положительную, поскольку в этом случае и при заклинивании привода двигатель отключается, Если же она нежелательна, ее устраняют некоторым снижением сопротивлений резисторов R5 — R7 и (или) повышением сопротивления резистора R1. Величина и форма напряжения на резисторе R2 практически не зависят от изменения сетевого напряжения благодаря наличию ограничителя R4 — VD1. В результате колебания питающего напряжения не приводят к нестабильности устанавливаемого фазового угла открывания симистара. Существенно снижается и нестабильность по напряжению сети устанавливаемой скорости двигателя. При неизменном фазовом угле скорость меняется только за счет изменения амплитуды напряжения на двигателе.
Особенность описываемого регулятора заключается в применении симистора. Дело в том, что коммутация максимальной скорости замыканием цепи «анод-катод» предполагает наличие контактов SA1 мгновенного действия с достаточной разрывной мощностью. При ином исполнении контактов в них может возникать искрение или электрическая дуга. Послед няя крайне нежелательна, так как приводит к подгару контактов и печатной платы и, следовательно, пожароопасна. Симис-тор позволяет перенести коммутацию в цепь управляющего электрода, что полностью исключает искрение в контактах, упрощает их конструкцию и привязку к регулировочному резистору R2. При регулировании симистор работает как тиристор, а при замыкании контактов пропускает на двигатель переменный ток. Транзисторы во время открытого состояния симистора блокируются и не функционируют.
Показанное на схеме регулятора включение статарной и роторной обмоток оптимально для двигателей с раздельно выведенными концами обмоток. При применении двигателей с внутренним соединением роторной и статорной обмоток их подключают на место показанной на схеме роторной обмотки, а цепь статорной обмотки заменяют перемычкой. Однако из-за наличия статорной обмотки в цепи обратной связи последний вариант регулятора имеет несколько худшие характеристики регулирования скорости. Конденсаторы С2, С6 устраняют помехи, а цепочка R11C5 подавляет искрение щеток.
Резистор R1 ограничивает пределы регулирования открытого состояния симистора началом положительного полупериода. При возрастании нагрузки на валу про-тиво-ЭДС двигателя дополнительно сдвигает момент отпирания симистора к началу полупериода относительно положения, задаваемого регулировочным резистором R2 на холостом ходу. Если резистор R1 был выбран на холостом ходу, та под нагрузкой противо-ЭДС как бы переносит момент открывания симистора за начало полупериода. В результате он открывается через период и возникает «провал-(уменьшение) скорости в верхнем положении движка резистора R2, Это явление устраняется увеличением сопротивления резистора R1.
Во время разработки регулятор испытывался с различными коллекторными электродвигателями: ДК77 (для бытовых электроприборов и электроинструмента), МШ-2 (для швейных машин) и даже с двигателем параллельного возбуждения СЛ261М. Управление такими существенно различными двигателями не потребовало внесения каких-либо изменений в регулятор. При использовании двигателя с параллельным возбуждением следует иметь в виду, что его статорная обмотка должна запитываться от отдельного внешнего источника и притом до подачи напряжения через регулятор на якорь.
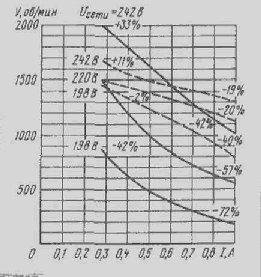
Возможности регулятора иллюстрируют нагрузочные характеристики (сплошной линией без VD1, штриховой с VD1), снятые с двигателем ДК77-280-12 при устанавливаемой на холостом ходу скорости 1500 об/мин и различном напряжении сети (рис, 3). Этот двигатель мощностью 400 Вт при скорости 1200 об/мин легко тормозится положенной на его вал рукой вплоть до полной остановки в том случае, если питание на чего подавать через автотрансформатор, устанавливая на холостом ходу ту же скорость 1500 об/мин.
При незначительном усложнении относительно прототипа регулятор совершенно некритичен к разбросу параметров элементов, В качестве симисторов применимы ТС, ТС2, 2ТС112иТС106 на токи 6,3-10-16 А, а также КУ208Г или 2У208Гна 5 А. Можно также использовать тиристоры КУ201Л, 2У201Л, КУ202Н-М, 2У202Н-М, КУ228И и другие при условии установки замыкателя по цепи «анод-катод». Необходимость теплоотвода определяется величиной тока нагрузки. Транзисторы должны допускать ток не ниже 250 мА и напряжение не менее 15В, Функции VT1 могут выполнять КТ350А, КТ209 (А-М), КТ501А, КТ502А (Б-Е), КT661A, КТ681А и другие, a VT2 -- КT503A (Б-Е), КТ645А, КТ660А (Б), КТ684А (Б) и другие с аналогичными характеристиками. Диоды могут быть на ток не ниже 10 мА и напряжение не менее 400 В —КД105(Б-Г), КД209 (А-В), КД221 (В-Г), КД226 (В-Д), Д209,Д210,Д211,Д226,Д237(Б-В).
Стабилитрон VD1 подойдет на напряжение стабилизации 120...180 В (КС630А, КС650А, KC680A, 2C920A, 2C950A, 2С980А) и может быть заменен цепочкой последовательно включенных маломощных стабилитронов на суммарное напряжение 150 В. Стабилитрон VD4 — любой маломощ-ный с напряжением стабилизации 9...11 В, кроме термокомпенсированных. Конденсаторы С1—С4 — керамические КМ, КМ-6, К10-17 или пленочные К73-17. Конденсаторы С5, С6 - К73-17 с номинальным напряжением 630 В (конденсаторы иных типов и К73-17 на меньшее номинальное напряжение использовать нельзя).
Постоянные резисторы — МЛТ или любые другие. Резистор R2 — РП1-64А, он может быть заменен любым непроволочным переменным резистором с линейной характеристикой (СПЗ-4М, СПЗ-6, СП3-9 и др.). Выбор резистора с обратнолога-рифмической характеристикой (В) позволит расширить плавность регулирования в зоне малых скоростей двигателя, Подст-роечный резистор R3 -- СПЗ-27, СПЗ-38. Его можно заменить подобранным постоянным резистором.
Замыкатель максимальной скорости SA1 выполнен в виде подвижного пружинного пластинчатого контакта и неподвижной стойки на плате регулятора. Между резистором R2 и подвижным контактом находится переходная пластмассовая втулка с кулачком, обеспечивающим замыкание подвижного контакта со стойкой в верхнем по схеме положении переменного резистора R2.
При налаживании регулятора движок резистора R2 следует установить в нижнее по схеме положение и подстроенным резистором R3 выставить желаемую минимальную скорость вращения двигателя. Далее, изменяя положение движка резистора R2, следует проверить изменение оборотов от минимальных до максимальных, отсутствие «качания» оборотов на минимальной скорости без нагрузки, отсутствие «провала» в оборотах на максимальной скорости однополупериодного режима под нагрузкой, а также срабатывание контактов максимальной скорости. Качание устраняется увеличением емкости конденсатора С4, а провал - увеличением сопротивления резистора R1, после чего вновь уточняют положение движка резистора R3.
В заключение необходимо отметить, что в регуляторах данного типа таходатчи-ксм является исполнительный электродвигатель и напряжение обратной связи определяется остаточной намагниченностью магнитопровода двигателя и стабильностью щеточного контакта. По этой причине качество регулирования напрямую зависит от указанных характеристик применяемого двигателя. Однако предельная простота устройства управления и хорошие нагрузочные характеристики вполне компенсируют этот недостаток.