Панкратов В.В.
ВЕНТИЛЬНЫЙ ЭЛЕКТРОПРИВОД: ОТ СТИРАЛЬНОЙ МАШИНЫ ДО МЕТАЛЛОРЕЖУЩЕГО СТАНКА И ЭЛЕКТРОВОЗА
Опубликовано: Электронные компоненты. – 2007. – № 2.
Иточник: http://www.erasib.ru/user_images/File/papers/vent.pdf
Аннотация. В статье обсуждается современное состояние теории и практики построения вентильных электроприводов регулируемой скорости на базе синхронных электрических машин с постоянными магнитами: наиболее распространенные виды вентильных электроприводов, принципы и особенности их функционирования, некоторые структуры силовых преобразователей электрической энергии, способы и алгоритмы «бездатчикового» управления.
Введение.
В самом общем случае вентильным можно назвать любой электропривод, в котором регулирование режима работы электродвигателя производится с помощью управляемых вентильных (полупроводниковых) преобразователей электрической энергии: выпрямителя, импульсного регулятора постоянного тока, преобразователя частоты. В более узком, общепринятом смысле вентильный электропривод (ВЭП) или вентильный двигатель (ВД) представляет собой электромеханотронную систему, в которой объединены синхронная электрическая машина, как правило, с возбуждением от постоянных магнитов (СДПМ), см. рис.1 и 2, электронный коммутатор (инвертор), посредством которого осуществляется питание обмоток якоря машины, и система автоматического управления инвертором, оснащенная необходимыми измерительными устройствами (датчиками). Традиционно управление ключами инвертора ВЭП осуществляется в функции положения ротора синхронного двигателя.
Благодаря своим высоким эксплуатационным характеристикам, СДПМ являются наиболее перспективными электрическими машинами в диапазоне малых и средних мощностей, особенно – для моментных систем электропривода. СДПМ конструктивно просты, надежны, имеют абсолютно жесткие механические характеристики и не требуют затрат энергии на возбуждение. Эти качества электрической машины обуславливают применение ВД в промышленных системах автоматики, роботах и манипуляторах, приводах подач и главного движения металлорежущих станков, координатных устройствах, автоматических линиях по обработке различных материалов или сборке изделий, упаковочных и печатных машинах, принтерах и плоттерах, намоточных и лентопротяжных механизмах, прецизионных системах слежения и наведения, в авиационной и медицинской технике. ВД имеют свою "нишу" в тяговом электроприводе (электровоз ВЛ80ВР), приводах рулевого управления летательных и подводных аппаратов, электромеханических устройствах автомобилей (электромеханические усилители руля, стартер-генераторные устройства гибридных автомобилей, стеклоподъемники и др.), мотор-колесах аккумуляторных индивидуальных транспортных средствах (электровелосипеды, инвалидные коляски различных разработок), в бытовых устройствах (стиральная машина «Орь-Автомат», проигрыватели компакт-дисков).
Для изготовления ротора СДПМ могут использоваться ферритовые магниты. Они относительно дешевы, но обеспечивают невысокий уровень индукции магнитного поля. Поэтому в последние десятилетия предпочтение отдается высокоэнергетическим магнитам на основе сплавов редкоземельных металлов, обладающих большой коэрцитивной силой. Это позволяет значительно улучшить массогабаритные показатели ВЭП и получить более высокий вращающий момент в том же габарите статора двигателя. «Самарий-кобальт» (Sm-Со) и «неодим-железо-бор» (Nd-Fe-B) – наиболее распространенные материалы современных редкоземельных магнитов.
В настоящей статье обсуждается современное состояние теории и практики построения вентильных электроприводов регулируемой скорости на базе синхронных электрических машин с постоянными магнитами: наиболее распространенные виды вентильных электроприводов, принципы их построения и особенности функционирования, некоторые структуры силовых преобразователей электрической энергии (коммутаторов), основные способы и алгоритмы автоматического управления ВЭП при отсутствии на валу двигателя датчика положения ротора.
Преимущества вентильных электроприводов.
Постоянное удешевление магнитных материалов, а также ускоряющееся развитие аппаратной базы систем управления и устройств силовой электроники сделали возможным применение ВД в тех областях техники, где традиционно применялись только машины постоянного тока или специальные асинхронные двигатели. Это объясняется целым рядом конструктивных и технико-эксплуатационных преимуществ С ДПМ по сравнению с другими существующими типами электрических машин, к числу которых можно отнести следующее [1, 2].
■ Бесконтактность и отсутствие узлов, требующих обслуживания. Отсутствие у вентильных электродвигателей скользящих электрических контактов существенно повышает их ресурс и надежность по сравнение с электрическими машинами постоянного тока или асинхронными двигателями с фазным ротором, расширяет диапазон достижимых частот вращения. Обмотка якоря С ДПМ может быть запитана более высоким номинальным напряжением, поэтому конструктивная постоянная момента Cm ВД существенно превышает аналогичную величину классических машин постоянного тока, что позволяет использовать при подключении ВЭП кабели меньшего сечения и преобразователи электрической энергии на меньшие токи.
■ Большая перегрузочная способность по моменту (кратковременно допустимый момент и ток С ДПМ могут превышать номинальные значения в 5 и более раз).
■ Высокое быстродействие в переходных процессах по моменту. Абсолютно жесткая механическая характеристика и практически неограниченный диапазон регулирования частоты вращения (1:10000 и более). Возможность регулирования частоты вращения как вниз от номинальной (с постоянством длительно допустимого и максимального моментов), так и вверх (с постоянством мощности).
■ Наилучшие энергетические показатели (КПД и коэффициент мощности). КПД вентильных двигателей превышает 90% и незначительно отклоняется от номинального при вариациях нагрузки, в то время как у серийных асинхронных двигателей мощностью до 10 кВт максимальный КПД составляет не более 87,5% и существенно зависит от момента. Так, уже при половинной нагрузке на валу он может упасть до 60... 70%.
■ Минимальные токи холостого хода.
■ Минимальные массогабаритные показатели при прочих равных условиях. Так как основные электрические и магнитные потери в роторе С ДПМ отсутствуют, а современные редкоземельные постоянные магниты, например, на основе соединения «неодим-железо-бор» способны обеспечить максимальную индукцию в воздушном зазоре даже без концентрации потока на уровне асинхронных машин (до 0,8 Тл.), в СДПМ может быть значительно повышена линейная нагрузка при сохранении суммарных потерь в машине на постоянном уровне, что и объясняет более высокую электромеханическую эффективность вентильных двигателей по сравнению с другими типами бесконтактных электродвигателей переменного тока.

Рис.1. Вентильный двигатель ВД-300 мощностью 7,5 кВт (ОАО «КБ ПА», г. Ковров), используется в качестве исполнительного элемента в быстродействующих следящих приводах специального и общепромышленного назначения.


Рис.2. Дисковые СДПМ (ЗАО «СЗЭМО», г. Санкт-Петербург).
Именно благодаря этим преимуществам ВД занимают ведущие позиции в каталогах продукции ведущих зарубежных электротехнических фирм – Siemens AG, General Electric, Bosch Rexroth AG, Ansaldo, Fanuc и др.
В Российской Федерации вентильные электроприводы и специализированные СДПМ производятся серийно с 1980-х гг. Примерами тому являются комплектный электропривод ЭПБ1 и двигатели серий ДБМ, ДВ (ЗАО «Машиноаппарат», г. Москва). В последние годы работы по созданию современных ВЭП вновь приобрели былую интенсивность. В частности, комплексом электротехнических предприятий, объединенным Чебоксарским электроаппаратным заводом (ОАО «ЧЭАЗ»), на базе электрических машин серий ДВФ и ДВМ спроектирована новая серия современных отечественных вентильных двигателей 5ДВМ, а также тяговый вентильный электродвигатель ВМЭД-01 мощностью 120 кВт для специальных транспортных средств (городской автотранспорт, электромобиль) и автомобилей [1]. В электрических машинах новой серии применены термостабильные отечественные постоянные магниты из материала «неодим-железо-бор» со специальными легирующими добавками, которые способствуют повышению коэрцитивной силы и сохранению свойств магнитов при нагреве до +170°С и пятикратной кратковременной перегрузке двигателя по моменту и току якоря. Это обеспечивает снижение расхода дорогостоящих магнитных материалов и улучшению массогабаритных показателей машины. Проектированием и изготовлением ВД также занимаются: ОАО «КБ ПА», г. Ковров; лаборатория спецмашин (ЛСМ) ЗАО «СЗЭМО», г. Санкт-Петербург (дисковые СДПМ); конструкторское бюро мехатроники, г. Златоуст Челябинской области; отдел электромеханических систем воспроизведения движений (ОЭСВД) и лаборатория электромеханики Новосибирского государственного технического университета, а также многие другие предприятия.
Виды вентильных двигателей.
1. Бесконтактные (бесщеточные) двигатели постоянного тока (БДПТ), в англоязычной литературе называемые "brushless DC motors", в которых конструкция синхронной машины магнитоэлектрического возбуждения, т.е. геометрическое расположение витков обмотки якоря на статоре и постоянных магнитов на роторе, обуславливает фазные ЭДС вращения трапецеидальной формы, рис. 3.
2. Бесконтактные двигатели переменного тока – "permanent-magnet brushless AC motors", фазные ЭДС вращения которых имеют синусоидальный характер. Именно такие системы чаще всего называют вентильными двигателями – ВД.
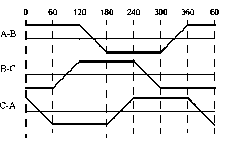
Рис.3. Линейные ЭДС бесконтактного двигателя постоянного тока.
Бесконтактный двигатель постоянного тока.
По принципу действия БДПТ представляет собой обращенную машину постоянного тока с магнитоэлектрическим индуктором на роторе и обмоткой якоря на статоре, функции щеточно-коллекторного узла в которой выполняет полупроводниковый коммутатор, питающий обмотку якоря и переключающийся в функции положения ротора. Наиболее часто используются БДПТ с трехфазной обмоткой на статоре. Статор трехфазного БДПТ идентичен статору асинхронного двигателя, рис. 4 [5], и его обмотка, как правило, соединена в звезду. Возможные варианты конструкции ротора двигателя и расположения постоянных магнитов иллюстрируются рис.5 [4].
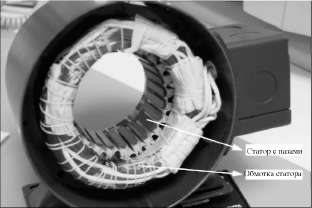
Рис.4. Статор БДПТ.
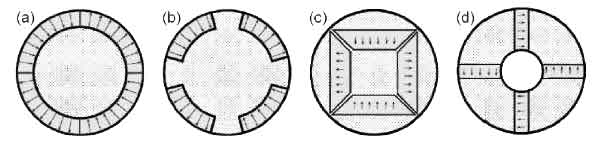
Рис.5. Различные конструкции ротора БДПТ.
Момент БДПТ образуется вследствие реакции двух магнитных потоков – статора и ротора. Магнитный поток статора всегда стремится так развернуть ротор с постоянными магнитами, чтобы поток последнего совпал с ним по направлению. Так же действует магнитное поле Земли на стрелку компаса. При этом с помощью датчика положения ротора электрический угол между двумя потоками в БДПТ всегда сохраняется в диапазоне 90±30 , что соответствует максимальному вращающему моменту.
Для питания обмотки якоря БДПТ принципиально может применяться любой управляемый полупроводниковый преобразователь, реализующий жесткий алгоритм 120-градусной коммутации токов или напряжений трехфазной нагрузки, как показано на рис.6 [5]. В качестве примера на рис.7 приведена функциональная схема силовой части двухзвенного преобразователя напряжений электропривода «Триол ВТ04» (производство корп. «Триол», г. Москва), построенной на базе транзисторного IGBT-инвертора с амплитудно-импульсной модуляцией выходных напряжений, которая осуществляется посредством широтно-импульсного регулирования напряжения в звене постоянного тока преобразователя. Здесь: ВП - полууправляемый выпрямитель (вентильный преобразователь), предназначенный для обеспечения плавного предзаряда емкости входного фильтра преобразователя Ф1; КРН – ключ регулятора напряжения на емкости выходного фильтра Ф2; РК – разрядный ключ, предназначенный для реализации режимов генераторного торможения двигателя; АИН – транзисторный автономный инвертор напряжения; ДТ – датчик тока двигателя. Могут использоваться и другие двухзвенные преобразователи частоты (ПЧ) трехфазного электропривода переменного тока:
■ тиристорный ПЧ с автономным инвертором тока или напряжения и управляемым вентильным преобразователем на стороне питающей сети;
■ транзисторный ПЧ с автономным инвертором напряжения, работающим в режиме широтно-импульсной модуляции или прямого разрывного (релейного) регулирования выходного тока (см. ниже силовую схему ВД).
Механические и электромеханические (скоростные) характеристики БДПТ полностью аналогичны характеристикам классической машины постоянного тока с независимым или магнитоэлектрическим возбуждением. Поэтому и системы автоматического управления скоростью БДПТ обычно строятся по классическому принципу подчиненного регулирования координат электропривода постоянного тока с контурами тока якоря и частоты вращения.
Рис.6. Временные диаграммы работы БДПТ с двумя парами полюсов
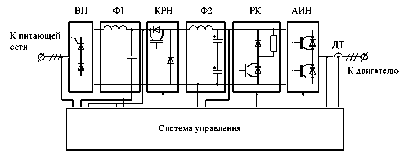
Рис.7. Функциональная схема силовой части электрического преобразователя БДПТ.
В качестве датчика собственных нужд, необходимого для реализации алгоритма переключения коммутатора БДПТ, могут использоваться согласованные с двигателем по числу пар полюсов индуктивные или емкостные дискретные датчики положения, а также системы на базе датчиков Холла и постоянных магнитов. Однако любой из вышеперечисленных видов датчиков существенно усложняет конструкцию электрической машины и снижает надежность электропривода в целом. Кроме того, существует широкий круг технологических механизмов, где в силу удаленности двигателя от коммутатора использование датчиков положения практически невозможно. В этой связи часто применяются так называемые «бездатчиковые» (sensorless) алгоритмы управления БДПТ, основанные на анализе поведения электромагнитных переменных СДПМ, которые могут быть измерены непосредственно на выходных клеммах полупроводникового преобразователя, и текущей частоты вращения (питания) двигателя.
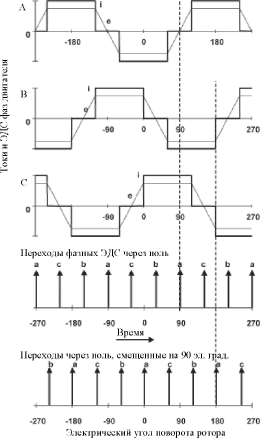
Рис.8. К принципу «бездатчикового» управления коммутатором БДПТ.
Наиболее распространенный алгоритм «бездатчикового» управления БДПТ основан на косвенном измерении (вычислении оценки) ЭДС одной из фаз двигателя, на данном интервале времени отключенной от источника питания. Коммутация токов двигателя осуществляется путем фиксации момента перехода через ноль ЭДС отключенной фазы, который со сдвигом на 90 электрических градусов определяет середину соответствующего импульса тока [4], рис.8. К преимуществам данного способа управления следует отнести его простоту, но очевидны и следующие недостатки.
■ Сложность определения момента перехода ЭДС через ноль на малых скоростях.
■ Задержку на включение очередного состояния коммутатора удается точно сформировать лишь при постоянной частоте вращения ротора.
Дабы избежать работы с малыми сигналами и не формировать программное запаздывание, можно использовать более сложные методы косвенного оценивания положения ротора [4]:
■ по третьей гармонике ЭДС вращения;
■ по изменениям индуктивностей фаз двигателя;
■ по оценкам потокосцеплений фаз, ричем алгоритмы оценивания потокосцеплений, в свою очередь, базируются на наблюдателях Люенбергера, расширенных фильтрах Калмана или нейро-сетевых моделях электромагнитных процессов в БДПТ. Один из вариантов построения наблюдателей потокосцеплений ВД рассматривается ниже.
Известно (см. рис.6), что при прямоугольных напряжениях на фазах статора электромагнитный момент БДПТ существенно пульсирует (амплитуда пульсаций может достигать до 25% от номинального момента двигателя [6]), что вызывает неравномерность вращения, ограничивающую диапазон регулирования скорости снизу. Поэтому целесообразно формировать в фазах статора близкие к прямоугольным токи, для чего используются замкнутые контуры регулирования.
Вентильный двигатель переменного тока.
Синхронные двигатели с синусоидальной формой ЭДС вращения и, соответственно, с синусоидально распределенными по расточке статора трехфазными обмотками якоря сложнее в изготовлении, имеют значительные лобовые части обмоток и требуют, таким образом, большего расхода меди. Однако они превосходят БДПТ по массогабаритным показателям, обеспечивают минимальные пульсации вращающего момента и поэтому используются в глубоко регулируемых и прецизионных системах электропривода, приводах подач металлорежущих станков и измерительных установках. В отличие от БДПТ, питание обмотки якоря ВД переменного тока осуществляется трехфазно-симметричной системой токов (напряжений), при этом используется ставшая уже стандартной силовая схема преобразователя электрической энергии на базе транзисторного IGBT-инвертора напряжения, см. рис.9-10. Благодаря управлению транзисторами инвертора в режиме модифицированной синусоидальной или пространственно-векторной широтно-импульсной модуляции (ШИМ) с относительно высокими частотами (для двигателей малой и средней мощности с номинальной частотой питания 50 Гц частоты ШИМ могут составлять от 1 до 20 кГц) обеспечивается близкая к синусоидальной форма токов ВД.
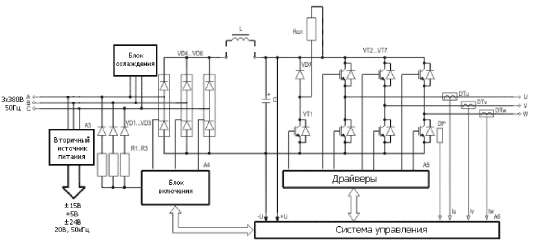
Рис.9. Функциональная схема силовой части преобразователя ЭРАТОН-М4(5) производства ЗАО «ЭРАСИБ», г. Новосибирск.

Рис.10. Внешний вид преобразователя ЭРАТОН-М5.
В настоящее время в ВЭП переменного тока используются так называемые «векторные» или как их частный случай – частотно-токовые алгоритмы автоматического управления моментом и частотой вращения СДПМ. При этом управляющие воздействия на выходные переменные трехфазного инвертора напряжения – средние за период ШИМ значения фазных токов и напряжений двигателя формируются во вращающейся декартовой системе координат (d, q), ось абсцисс которой (d) ориентирована по направлению продольной оси ротора СДПМ или, в некоторых случаях, по направлению волны магнитного поля в воздушном зазоре двигателя. Значение тока якоря СДПМ по поперечной оси q, пропорциональное электромагнитному моменту (это утверждение строго выполняется для неявнополюсных машин с одинаковыми индуктивностями обмотки якоря по продольной и поперечной осям), задается аналогично току якоря классической машины постоянного тока, как правило, с выхода регулятора скорости. Таким образом, в системе регулирования ВЭП также реализуется общеизвестный принцип подчиненного регулирования координат. Значение тока якоря по продольной оси d, аналогично току возбуждения машины постоянного тока, позволяет оптимизировать процесс электромеханического преобразования энергии и осуществлять регулирование частоты вращения СДПМ выше основной с постоянством мощности (во второй зоне). В ВЭП на базе СДПМ используются довольно сложные законы управления током по продольной оси машины, каждый из которых имеет свои преимущества и недостатки, ограничивающие предметную область: управление с поперечным током якоря, с единичным коэффициентом мощности (cosφ), с постоянством магнитного потока в воздушном зазоре [7].
В качестве примера на рис.11 приведена укрупненная функциональная схема системы управления ВЭП переменного тока с непосредственной ориентацией вращающейся системы координат по положению ротора двигателя. На рисунке: РС и РТ – регуляторы скорости и токов двигателя; ВС – вычислитель скорости; ПК1 и ПК2 – преобразователи координат; ДП – датчик положения ротора. Источник уставки по току isd на рисунке не указан. В такой системе могут быть достигнуты максимальные диапазоны регулирования частоты вращения (до 105) и наивысшее быстродействие, которое характеризуется полосой пропускания частот контура регулирования скорости, составляющей до 500 Гц. Время реакции момента двигателя на скачек задания тока isq может составлять величину порядка 10-5…10-4 с.
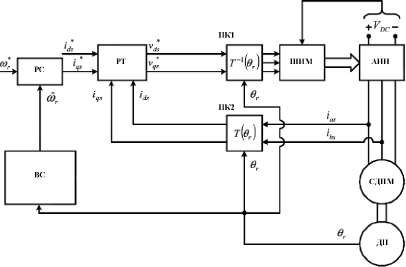
Рис.11. Функциональная схема ВЭП переменного тока с датчиком положения ротора.
Чтобы достичь максимальных диапазонов регулирования ВЭП, необходимо не только обеспечить синусоидальную форму токов двигателя, но и скомпенсировать пульсации момента, возникающие, в частности, в связи с модуляцией магнитного потока зубцами статора и явлением «тяжения» полюсов ротора к положениям максимальной магнитной проводимости для потока постоянных магнитов [8].
Направлением наиболее динамичного развития ВЭП является создание "бездатчиковых" систем, не содержащих датчика положения ротора, в качестве которого традиционно применяются фотоэлектрические инкрементальные энкодеры. Подробный обзор основных алгоритмических решений "бездатчикового" векторного управления СДПМ приведен в сборнике статей [9]. Абсолютное большинство из них основаны на косвенном определении электрического положения ротора двигателя по направлению изображающего вектора составляющей магнитного потокосцепления якоря, обусловленной постоянными магнитами. Для вычисления этого вектора или непосредственно связанного с ним положения ротора двигателя на практике наиболее часто используются классические методы оценивания: наблюдатели состояния (наблюдатели Люенбергера) полного или пониженного порядка (Full Order and Reduced Order State Observers), расширенный фильтр Калмана (Extended Kalman Filter (EKF)), адаптивные системы с задающей моделью (Model Reference Adaptive System (MRAS)), а также специальные наблюдатели, функционирующие в реальных скользящих режимах [2]. Все эти методы связаны с большим объемом вычислений, что вызывает определенные трудности при их реализации в реальном масштабе времени даже на базе современных предметно-ориентированных цифровых сигнальных процессоров (DSP). В специальной литературе также можно найти примеры применения для этих целей математического аппарата нечеткой логики и искусственных нейронных сетей. Одна из возможных структур вычислителя положения ротора СДПМ по измерениям токов и напряжений двигателя приведена на рис.12 [4]. В свою очередь, наблюдатель потокосцепления имеет структуру рис.13, соответствующую векторному уравнению равновесия напряжений статора
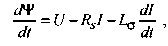
где Rs, Ls – активное сопротивлениеи и индуктивность рассеяния обмотки якоря, причем обратная связь с коэффициентом l и стабилизирующая оценка потока призваны обеспечить асимптотическую устойчивость наблюдателя и синтезируются дополнительно.
Работоспособность «бездатчиковых» электроприводов напрямую зависит от точности располагаемой информации о параметрах электромагнитных процессов, которые могут изменяться, например, с температурой или степенью насыщенности участков магнитопровода машины. Для адаптации ВЭП к изменениям параметров двигателя применяются алгоритмы предварительной ("off-line") и текущей ("on-line") параметрической идентификации. Алгоритмы текущей идентификации используются для адаптации наблюдателя потокосцепления в процессе работы привода и синтезируются, как правило, на основе второго (прямого) метода А.М. Ляпунова [9]. Алгоритмы предварительной идентификации автоматически определяют параметры СДПМ перед запуском электропривода, настраивая систему управления ВЭП и задавая начальные приближения параметров для алгоритмов текущей идентификации. Разработка и реализация устойчивых и достаточно точных процедур предварительной и текущей параметрической идентификации, превращающих ВЭП в »интеллектуальную» систему, составляет основу содержания большого числа проводимых в настоящее время исследований [10].
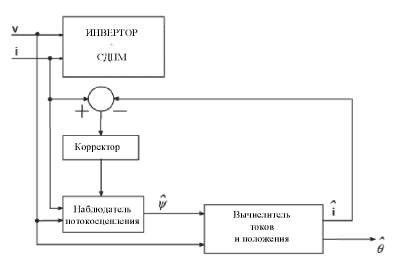
Рис.12. Структурная схема вычислителя положения ротора ВД.
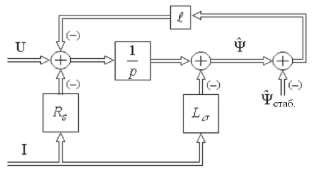
Рис.13. Структурная схема наблюдателя потокосцепления.
Реализация ВЭП на базе высоковольтного синхронного двигателя.
Принципиально вентильный электропривод с векторным управлением может быть построен и на базе довольно мощных синхронных двигателей с электромагнитным возбуждением. Ярким примером тому является высоковольтный «бездатчиковый» электропривод «ЭРАТОН-В» разработки ЗАО «ЭРАСИБ», г. Новосибирск. Силовая часть электропривода (рис.14) построена на транзисторных однофазных Н-мостах. В зависимости от номинального напряжения двигателя это может быть так называемый трех– или пятиуровневый инвертор. Управление инвертором осуществляется в соответствии с описанным выше принципом ориентации управляющих воздействий по магнитному потоку ротора. Аналогичные в преобразовательной части системы имеются в арсенале многих зарубежных фирм, в частности Mitsubishi и Toshiba.


Рис.14. Внешний вид силового преобразователя ВЭП «ЭРАТОН-В».
Заключение.
Вентильный электропривод на базе СДПМ является универсальным средством электромеханического преобразования энергии и автоматизации технологических процессов. Принципы построения силовой части ВЭП уже устоялись и остаются неизменными в течение нескольких последних десятилетий, что не исключает их развитие в части улучшения электромагнитной совместимости электроприводов с питающей сетью. Главным направлением совершенствования ВЭП в ближайшей перспективе будет разработка и оптимизация адаптивных "бездатчиковых" алгоритмов управления, ориентированных на микропроцессорную реализацию и обеспечивающих диапазоны регулирования с постоянством момента 1:150…200.
Литература.
1. Вентильный электропривод: шанс для российских производителей. // Оборудование: рынок, предложение, цены. – 2004. – №1.
2. Корельский Д.В., Потапенко Е.М., Васильева Е.В. Обзор современных методов управления синхронными двигателями с постоянными магнитами. // Науковий журнал «Радiоелектронiка. Iнформатика. Управлiння», 2001. – С. 155 –159.
3. N. Matsui, “Sensorless PM Brushless DC Motor Drives,” IEEE Trans. Ind. Electron., vol. 43, no. 2, pp. 300–308, Apr. 1996.
4. P. P. Acarnley and J. F. Watson, "Review of Position-Sensorless Operation of Brushless Permanent-Magnet Machines", IEEE Trans. Ind. Electron., vol. 53, no. 2, pp. 352–362, Apr. 2006.
5. Padmaraja Yedamale, "Brushless DC (BLDC) Motor Fundamentals" (AN885). – Microchip Technology Inc. – 2003.
6. J. Cros et al., "A novel current control strategy in trapezoidal EMF actuators to minimize torque ripples due to phase commutation", in EPE Eur. Conf. Power Electron., Applicat. (EPE), Brighton, U.K., vol. 4, 1993, pp. 266-271.
7. S. Morimoto, Y. Takeda, T. Hirasa, "Current Phase Control Methods for Permanent Magnet Synchronous Motors", IEEE Trans. Pow. Electron., vol. 5, no. 2, pp. 133–139, Apr. 1990.
8. J. Holtz, L. Springob, "Identification and Compensation of Torque Ripple in High-Precision Permanent Magnet Motor Drives", IEEE Trans. Ind. Electron., vol. 43, no. 2, pp. 309–320, Apr. 1996.
9. "Sensorless Control of AC Motor Drives. Speed and Position Sensorless Operation" / Edited by Kaushik Rajashekara, Atsuo Kawamura, Kouki Matsuse, IEEE Press, New York, 1996.