Л.Н.Анищенко, И.А.Васильев, С.И.Ивашов, В.Б.Парашин. МГТУ им.Н.Э.Баумана; А.С.Бугаев. МФТИ; О.С.Медведев. МГУ им.М.В.Ломоносова
Источник: III Всероссийская конференция «Радиолокация и радиосвязь» – ИРЭ РАН, 26-30 октября 2009 г.
Введение
Биорадиолокация [1],метод дистанционного обнаружения и диагностики биологических объектов, в том числе за оптически непрозрачными препятствиями, является интенсивно развивающимся направлением радиотехники. Существует ряд медико-инженерных задач,для решения которых использование радиолокационных средств является актуальным, среди них: медицина катастроф (поиск выживших под завалами строительных конструкций), мониторинг параметров дыхания и сердцебиения у ожоговых больных (позволит снизить количество контактных датчиков и, следовательно, риск занесения инфекции в ожоговые раны больного), диагностика апноэ сна, а также мониторинг параметров дыхания и сердцебиения у больных, являющихся переносчиками особо опасных инфекционных заболеваний (позволит снизить риск заражения медицинского персонала), и др. [2, 3]. Кроме вышеперечисленных областей применения представляет интерес использование метода биорадиолокации для дистанционной диагностики состояния здоровья лабораторных животных на основании анализа их двигательной активности, а также применение данного метода при проведении зоопсихологических экспериментов по оценке ориентировочно-исследовательского поведения крыс.
В настоящее время при апробации лекарственных препаратов и отравляющих веществ на лабораторных животных для оценки их реакции используются инвазивные методы измерения физиологических параметров, при этом оценка двигательной активности осуществляется исследователем визуально. Аналогично обстоит дело и с методами оценки поведенческих реакций животного. Для снижения нагрузки на оператора и автоматизации оценки двигательной активности могут быть использованы специально разработанные системы видеослежения, такие как Ethovision [4]. Главным недостатком такого типа систем является достаточно большой объем записываемой информации, кроме того, дальнейший анализ получаемого видеосигнала требует использования весьма сложных алгоритмов обработки.
Существуют другие устройства для автоматизированной оценки параметров двигательной активности лабораторных животных. Некоторые из них содержат вмонтированные в пол клетки датчики давления, позволяющие оценивать перемещение животного в клетке [5]. В других устройствах используются источники света и оптические сенсоры, вмонтированные в стены клетки [6]. Также для аналогичных целей предложено использовать электромагнитное излучение [7], при этом приемные и предающие антенны монтируют в пол и стены клетки. В работе [8] описано применение доплеровского радиолокатора для оценки двигательной активности крыс, зондирование пространства клетки осуществляется «в надир».
Общим недостатком всех перечисленных устройств является сложность изготовления клетки, в которую помещают животное при проведении эксперимента, а также то, что устройства рассчитаны на определенный вид животных, так как созданы с учетом его специфических морфометрических особенностей.
В силу приведенных выше фактов в большинстве случаев оценка двигательной активности животных производится исследователем вручную [9], что может влиять на качество получаемой информации.
Метод биорадиолокации позволяет оценивать интегральную двигательную активность крыс в автоматизированном режиме, и при этом объем файла данных настолько мал по сравнению с видеофайлом, что позволяет вести непрерывную запись в течение нескольких дней или более. При этом приемная и передающая антенны размешены на общем штативе, который располагается сбоку от клетки. Таким образом, данный метод в отличие от устройств, описанных в [5-8] не требует использования клеток специальной конструкции, достаточно применения пластикового контейнера, в котором обычно содержат животных в лабораториях.
Распознавание различных типов движения животного (горизонтальная и вертикальная двигательная активность, умывание, покой) при помощи метода биорадиолокации требует разработки специальных алгоритмов, что позволит использовать этот метод для автоматизированного анализа данных экспериментов, проводимых с использованием открытого пространства («open field»).
Были проведены эксперименты по изучению возможности оценки двигательной активности лабораторных животных при помощи биорадиолокатора. Ниже описана экспериментальная установка и приведены результатов экспериментов.
Проведние эксперемента
В качестве биорадиолокатора в экспериментах по оценке двигательной активности и частоты дыхания крыс был использован многочастотный радар с квадратурным приемником, разработанный в Лаборатории дистанционного зондирования МГТУ им. Н.Э. Баумана. Его технические характеристики приведены ниже:
Количество частот: 16
Частота дискретизации: 62,5 Гц
Полоса частот: 3,6 – 4,0 ГГц
Разрешение по дальности: 0,5 м
Частоты регистрируемых сигналов: 0,03 - 5 Гц
Динамический диапазон регистрируемых сигналов: 60 дБ
Размеры антенного блока 150х370х370мм
Хотя данный радиолокатор был разработан для дистанционного мониторинга параметров двигательной активности, дыхания и пульса человека, он также может быть использован для отслеживания движений малых лабораторных животных. Ниже приведены справочные данные, характеризующие организм крысы как объекта биорадиолокационного исследования [10]:
длина тела: 15-25 см;
длина хвоста: 15-25 см;
поперечный размер грудной клетки: 4-6 см;
частота дыхания: 1,2-1,6 Гц;
частота пульса: 6,0-7,0 Гц.
Основная проблема состоит в том, что размер крысы лишь немногим превышает длину волны зондирующего сигнала, поэтому величина полезного сигнала принимаемого радаром значительно ниже, чем для случая, когда объектом зондирования является человек. Кроме того, так как биорадиолокатор создавался для наблюдения за человеком, частота сердцебиения животного превышает верхнюю границу частотного диапазона регистрируемых радаром сигналов. Как известно, в классической радиолокации плотность потока мощности (P) вблизи приемной антенны радиолокатора обратно пропорциональна расстоянию до объекта локации (r) в четвертой степени [11]:
 (1)
(1)Следовательно, мощность сигнала, отраженного от животного и принимаемого биорадиолокатором, существенно зависит от расстояния между антенным блоком и животным. Например, для размера клетки 60х60х60 см и расстояния до локатора, равного от 1 до 1,5 м, мощность принимаемого сигнала для крайнего дальнего положения животного в клетке составит лишь 15% от аналогичного параметра для крайнего ближнего положения. Данный факт делает невозможной корректную оценку двигательной активности животных без точного измерения дальности до объекта.
Чтобы мощность сигнала не зависела от расположения крысы внутри клетки, был применен уголковый отражатель (УО) [11], который формировался полом и двумя боковыми стенками клетки, примыкающими к углу, дальнему от радиолокатора [12]. Для удобства, обозначим расстояние от радиолокатора до вершины УО l , а расстояние от животного до вершины УО x . На расстоянии l за УО формируется мнимый источник. При этом мнимый передатчик и приемник получаются расположенными по разные стороны от объекта зондирования. Таким образом, при использовании УО имеет место «просветная» схема радиолокации, для которой мощность принимаемого сигнала (Pп) имеет существенно другую зависимость от расстояния между антенной и объектом локации [13]:
 (2)
(2)При этом зависимость Pп от расстояния x менее значительная, чем для случая классической радиолокации (1). Для наглядности на рис. 1 приведены зависимости мощностей принимаемого сигнала от перемещения объекта относительно дальнего угла клетки.

Схема проведения эксперимента по оценке параметров двигательной активности животного при помощи биорадиолокатора приведена на рис. 2. В ходе эксперимента животное помещалось в бокс с диэлектрическими стенками. На пол и две боковые стенки клетки, формирующие уголковый отражатель, было нанесено металлизирующее покрытие. Передающая и принимающая антенны радара направлялись на бокс.
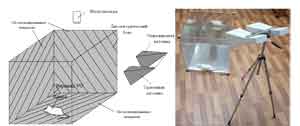
Сигнал, отраженный от животного записывался с целью дальнейшей обработки. Расстояние между антенным блоком и боксом составляло примерно 1 м. Такое небольшое расстояние обусловлено сравнительно небольшой эффективной площадью рассеяния животного. Кроме радиолокационного сигнала также записывался видео сигнал при помощи простейшей веб-камеры, расположенной над боксом. Информация о поведении и двигательной активности животного в течение эксперимента, полученная при помощи видеокамеры, была использована для идентификации радиолокационных сигналов. Такой метод позволяет различать различные типы движений животного и его поведения.
Две крысы (порода - альбино, возраст - 4 месяца) были использованы при проведении нескольких краткосрочных экспериментов, в течение которых наблюдались различные типы двигательной активности животного. Радиолокационные сигналы, отраженные от поверхности животного, были записаны в базу данных, которая в дальнейшем может быть использована для создания алгоритмов обработки, при помощи которых будет возможно отслеживать вертикальные и горизонтальные движения животного автоматически.
Результаты
Ниже приведены некоторые результаты экспериментов. На рис. 3 показан сигнал биорадиолокатора, отраженный от животного. Без какой-либо дополнительной обработки периоды относительного покоя и повышенной двигательной активности хорошо различимы.
Были получены спектры отраженного радиолокационного сигнала для различных состояний животного (активное движение, спокойное состояние, сон, умывание). Они имеют значительные различия по форме и амплитуде (рис. 4), следовательно, можно сделать вывод, что возможно отличать состояние покоя от активных движений, умывания и сна животного. Для простоты сравнения частотных спектров для различных состояний животного амплитуда спектра приведена в нелинейном масштабе (шкала по вертикальной оси пропорциональна квадратному корню из амплитуды).
Спектр, приведенный на рис. 4,а, соответствует активному состоянию животного. В течение эксперимента крыса обследовала внутреннее пространство бокса. Она двигалась вдоль стенок коробки и время от времени поднималась на задние лапы. Главной особенностью спектра принимаемого сигнала в этом случае является достаточно большая амплитуда максимальной спектральной составляющей, которая значительно превышает аналогичную величину для других состояний животного. Спектр, приведенный на рис. 4,б, соответствует спокойному состоянию животного (в течение эксперимента крыса сидела в углу бокса и изредка двигалась или поворачивала голову). Максимальная амплитуда в спектре более чем в три раза ниже, чем для активного состояния животного.

Для случая, когда животное спало (рис. 4,в), мощность принимаемого сигнала чрезвычайно мала. Так как животное не двигалось, то в спектре сигнала различима гармоника дыхания на частоте 1,5 Гц, что хорошо согласуется с литературными материалами [6].
Спектр, соответствующий периоду умывания крысы приведен на рис.4,г. Специфической особенностью этого спектра является наличие локального максимума в области 4 Гц. Частота спектра, соответствующая умыванию значительно зависит от времени суток и варьируется от 2 до 4 Гц. В течение дня эта частота ниже, чем в течение ночи. Главная проблема при распознавании данного типа движений состоит в том, что животное может очень интенсивно поворачиваться при умывании, и эти артефакты движения маскируют полезный сигнал.
Заключение
Показано, что метод биорадиолокации может быть использован для оценки двигательной активности малых лабораторных животных. В случае, когда животное спит, можно оценивать его частоту дыхания без каких-либо дополнительных процедур. Этого может быть достаточно для контроля за состоянием животного в фармакологии. С помощью метода биорадиолокации возможно различать различные типы движений и состояний животного без проведения каких-либо дополнительных процедур. Возможна оценка частоты дыхания крысы в состоянии бодрствования при условии обеспечения ее фиксированного положения относительно биорадиолокатора.
В настоящее время разрабатывается алгоритм для различения вертикальной и горизонтальной двигательной активности животного. После создания этого алгоритма биорадиолокация может быть использована в зоопсихологических экспериментах при наблюдении за животным в открытом пространстве.
Предполагается создание нового биорадиолокатора, который будет работать в более высоком частотном диапазоне (14-15 ГГц). Это повысит разрешающую способность радара в экспериментах с малыми лабораторными животными и улучшит, таким образом, качество получаемой информации.
Литература
- «Биорадиолокация». Коллективная монография./ Под ред. А.С. Бугаева, С.И. Ивашова, И.Я. Иммореева. – М.: МГТУ им. Н.Э. Баумана, 2009 (в печати).
- E. M. Staderini, “UWB Radars in Medicine,” IEEE Aerospace and Electronic Systems Magazine, pp. 13-18, January 2002.
- Detection of Human Breathing and Heartbeat by Remote Radar. S.I. Ivashov, V.V. Razevig, A.P. Sheyko, I.A. Vasilyev. Progress in Electromagnetics Research Symposium (PIERS 2004), March 28-31, 2004, Pisa, Italy, pp. 663-666.
- Site of the firm Noldus. Ethovision 3.1. http://www.noldus.com/animal-behavior-research/products/ethovision-31.
- US Pattent, No 3,633,011. Apparatus for measuring the activity of laboratory animals. Jan. 4, 1972.
- US Pattent, No 5,608,209. Method and apparatus for measuring motion amount of laboratory animal. Mar. 4, 1997.
- US Pattent, No 3,439,358. Activity detector. Apr. 15, 1969.
- Kropveld D., Chamuleau R. Doppler radar devise as a useful tool to quantify the liveliness of the experimental animal / Med. & Biol Eng. & Comput., 1993, 31, P.340-342.
- Cieslar G, Fiolka J, Mrowiec J et al. Influence of long-term exposure to static, high voltage electric field antioxidant activity in rats. XXVIIIth General Assembly of the International Union of Radio Science 2005, New Delhi, India. http://rp.iszf.irk.ru/hawk/URSI2005/pdf/K06.1(0462).pdfastname, F. M. “Title of the journal paper,” Journal Title Abbreviation, Vol. 34, No. 10, 1064–1076, 1986.
- http://www.labanimal.ru/?catid=10#3.
- Теоретические основы радиолокации. Под ред. Ширмана Я.Д. Учебное пособие для вузов. - М.: «Советское радио», 1970. – 560 c.
- Решение о выдаче патента на полезную модель, исходящий № 2009112550/22(017107) от 06.04.2009. «Радиолокационная система регистрации движений лабораторного животного в пределах ограниченного пространства». Авторы: Анищенко Л.Н., Васильев И.А., Ивашов С.И..
- Чапурский В.В. Синтезированная теневая радиоголография в бистатической радиолокации. – М.: Радиотехника, 2009, - № 3, - С. 52 - 69