РАЗРАБОТКА ОБЪЕКТНОЙ МОДЕЛИ КОМПЬЮТЕРНОЙ СИСТЕМЫ МОНИТОРИНГА ВОДНОЙ СРЕДЫ
Аннотация
Чесноков В.И., Светличная В.А. Разработка объектной модели мониторинга водной среды В данной статье описывается модель гидрофизической измерительной системы, ее компоненты, а также алгоритм планирования эксперимента с помощью приведенной модели.
Общая постановка проблемы.
История человечества неразрывно связана с изучением и освоением океана. Познание его началось в глубокой древности, со времени первых плаваний египтян и финикийцев. Особенно много новых данных получено за последние десятилетия с помощью новейшей техники. Исследования, проведенные на научных судах и собранные автоматическими океанографическими станциями, а также искусственными спутниками Земли, помогли обнаружить глубинные течения, вихри в водах океана, доказать существование жизни на больших глубинах.
Технические средства и методы исследования Мирового океана являются одной из быстро развивающихся отраслей современной океанологии. С одной стороны, это вызвано потребностями самой океанологической науки. С другой стороны, ряд важных и проблемных прикладных народно-хозяйственных задач в последние годы стимулирует разработку различной аппаратуры
Основной задачей океанологических исследований является изучение пространственно-временной изменчивости совокупности параметров Мирового океана. Изменчивость полей океанографических характеристик в пространстве изучается с различной зондирующей и буксируемой аппаратуры, устанавливаемой на надводных и подводных кораблях, подводных аппаратах. Дистанционные измерительные приборы, использующие различные диапазоны электромагнитного спектра, устанавливаются на самолетах и искусственных спутниках Земли.
Для дальнейшего изучения и освоения океана, человеку необходимо регулярно получать данные о его структуре и состоянии, чтобы выявить имеющиеся закономерности. Однако измерение параметров характеризующих состояние водной среды довольно трудная и дорогая операция. Поэтому одной из основных задач является построение наиболее эффективных алгоритмов и методов для измерения параметров водной среды. Испытание эффективности методов наиболее удобно и выгодно проводит на модели той области в которой проходят измерения.
Постановка задач исследования.
Для определения состояния и структуры водной среды необходимо знать значения ее параметров. Водная среда характеризуется следующими величинами: температура, давление, соленость, плотность, электропроводность, скорость.
Основными измеряемыми параметрами являются скорость, температура и электропроводность воды. Плотность и соленость могут быть получены аналитическим путем.
Их изменения в пространстве и во времени порождают многие физико-географические различия между отдельными частями океана. Эти вариации порождают слоистую структуру водной среды.
По степени изменения параметров водной среды различают:
Ламинарное течение — течение, при котором жидкость перемещается слоями без перемешивания и пульсаций (то есть беспорядочных быстрых изменений скорости и давления).
Турбулентное течение – хаотические неупорядоченные пульсации океанологических характеристик (скорости, давления, плотности, температуры и солености воды) относительно некоторого их среднего значения, обусловленные вихревыми движениями воды, различными по длительности и масштабам. Вихри возникают в результате динамической неустойчивости основного энергонесущего движения (волн, течения, конвекции), затем разрушаются, передавая энергию более мелким вихрям, и т. д. вплоть до молекулярного уровня. Горизонтальному распределению турбулентности также присуща перемежаемость — чередование локальных участков со слабой и с интенсивной турбулентностью, обусловленной опрокидыванием поверхностных и внутренних волн. Крупномасштабная турбулентность в океане в известном смысле подобна вихреобразным движениям в атмосфере типа циклонов и антициклонов. Она проявляется в виде почти горизонтальных вихрей.
Для измерения указанных параметров водной среды предполагается использовать зондирующие системы, устанавливаемые на судах. Они состоят из: набора измерительных датчиков, шагового двигателя используемого для опускания системы на различную глубину, АЦП, контроллер, управляющий составными частями системы, БД для хранения полученных результатов.
Использование подобной зондирующей системы является довольно дорогостоящей операцией, поэтому важной задачей является подборка оптимальных конфигураций системы для данных условий.
Целью работы является создание компьютерной системы моделирующей структуру указанного района, по имеющимся данным, и позволяющей решить следующие задачи:
1) Подбор оптимальных конфигураций измерительного устройства
2) Поиск оптимального пути корабля.
В виде измеряемого параметра выбрана - температура. Параметры используемые для конфигурации измерительного устройства: количество датчиков, расстояние между датчиками, скорость и дискретность двигателя, расстояние между точками измерения.Предполагается моделировать измерения в горизонтальной плоскости. В отличие от вертикальной структуры океана, где ламинарные слои сменяют турбулентные, границы данных слоев в горизонтальной плоскости имеют неопределенную форму что затрудняет измерение.
Решения задач и результаты исследования.
Основной задачей является построение наиболее оптимального пути измерительной системы по стоимости. Для поиска такого маршрута нам необходимо построить модель измерительной системы и ее взаимодействия с водной средой. Модель водной среды представлена полиномом, полученным с помощью численного анализа. Она строится на основе известных данных в определенных точках. Каждое измерение характеризуется временем, поэтому аппроксимирующий полином учитывает эту характеристику. С помощью полученного полинома измерительная система может получить значение выбранного параметра в тех точках, в которых не было реальных данных. Моделируя исследования при различных конфигурациях измерительной системы и разных маршрутах следования измерительного судна, мы получаем наборы измеренных данных, сравнивая которые можем определить наиболее оптимальные маршрут судна и конфигурации системы.
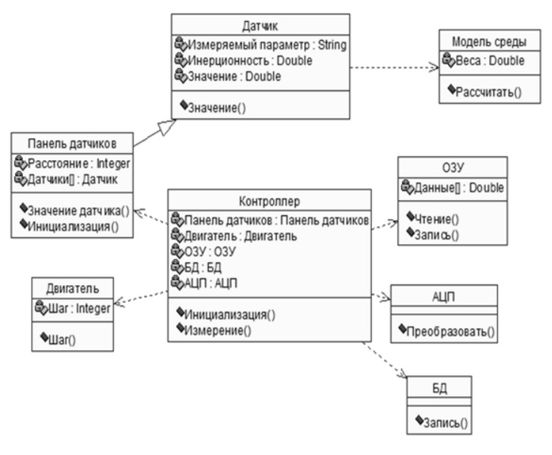
Рисунок 1 — Модель измерительной системы
Опишем компоненты модели:1) Датчик — характеризуется инерционностью и типом измеряемого параметра. Главной функцией является получения текущего значения. Для этого датчик вызывает функцию Рассчитать() у класса Модель среды.
2) Панель датчиков — содержит некоторое количество датчиков. Количество и расстояние между датчиками являются параметрами оптимизации системы. В ходе моделирования измерений панель поочередно опрашивает все датчики, или отвечающие за измеряемый параметр.
3) Двигатель — главным свойством является дискретность шага, от чего зависит плотность измерений. С его помощью осуществляется погружение на заданную глубину.
4) ОЗУ — запоминающее устройство хранящие данные полученные от датчиков до сохранения их в БД. Связано с АЦП и получает от него дискретные значения параметра.
5) АЦП — аналаго - цифровой преобразователь. Для уменьшение временной задержки между датчиками в ходе одного цикла измерений данные записывает в ОЗУ. Откуда в дальнейшем они попадают в БД.
6) Контроллер —управляет действиями измерительной системы.
7) Модель среды — модель водной среды главной задачей которой является возврат значения параметром водной среды в заданной точке. Модель строится на основе существующих данных. Для точек, в которых значение параметров неизвестно, применяется аппроксимация методом четырехмерного численного анализа. Опишем принцип данного метода. Существует две принципиально различные схемы четырехмерного анализа:
- Дискретная — предусматривает построение диагностических полей лишь для синоптических сроков наблюдений. В этом отношении она не отличается от существующих методик объективного анализа. Различие же состоит в том, что при построении каждого диагностического поля, наряду с данными наблюдений, относящихся к рассматриваемому сроку, используется также асиноптическая информация, относящаяся к другим, более ранним моментам времени.
- Наиболее логичной является другая непрерывная схема четырехмерного анализа, в рамках которой каждое наблюдаемое значение (синоптическое или асиноптическое) усваивается соответственно тому времени, к которому это наблюдение относится. Это усвоение заключается в изменении результатов численного прогноза для момента времени, соответствующего поступившему наблюдению. Иначе говоря, каждый результат наблюдения вводится в численную прогностическую модель, которая действует непрерывно.
Рассмотрим, например, один из подходов решения задачи четырехмерного анализа — полиномиальный. Метод полиномиальной интерполяции обобщается следующим образом. При представлении поля скалярного аргумента, например температуры, геопотенциала, давления и пр., в виде какого-либо полинома время t рассматривается в качестве одной из независимых переменных. Так, при использовании полинома второго порядка на плоскости принимается, что

Коэффициенты aj(j = 0,1,2,...,9), как и ранее, находятся из условия минимума:

где индекс i показывает положение точки на плоскости, а индекс s – момент времени, т. е. суммирование распространяется на все точки на плоскости и на все моменты времени. Значение весовой функции pis может быть выбрано из каких-либо дополнительных соображений (в простейшем случае pis =1). Далее, согласно методу наименьших квадратов, составляется нормальная система уравнений для определения коэффициентов aj (j = 0, 1, 2, …, 9).
8) БД — база данных, в которой хранятся данные предыдущих и текущего измерения. На основе предыдущих данных происходит начальная инициализация системы
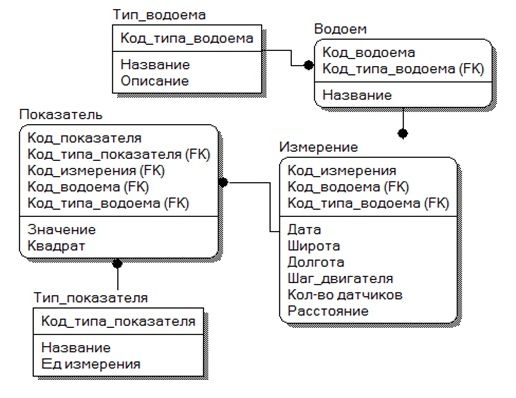
Рисунок 3 — схема БД для хранения полученных при измерениях данных
Выводы
В ходе ознакомления со структурой водной среды, ее характеристиками и методами моделирования была создана модель системы и базы данных. Данную модель можно использовать для моделирования измерения гидрофизических параметров и выбора оптимальных конфигураций измерительной системы и маршрута измерений.
Разработка системы является актуальной, поскольку большинство существующих инструментальных средств моделируют измерения в вертикальной структуре водной среды. Моделирование вертикальной структуры является не менее необходимым, но из-за сложности выполнения остается нереализованным.
СПИСОК ЛИТЕРАТУРЫ
1. Семенов Е.В. Состояние и развитие гидродинамических моделей океана в интересах ВМФ. Москва, 2008
2. Аргучинцева A.A. Методы статистической обработки и анализа гидрофизических наблюдений. Иркутск, 2007
3. Зори А.А.,Коренев В.Д., Хламов М.Г. Методы, средства, системы измерения и контроля параметров водных сред. Донецк, 2000