Рисунок 1 - Цели и возможности агента
\
Аннотация
Multi-Agent System Simulator (MASS) является дискретным, событийным многоагентным симулятором, обеспечивая обмен сообщениями с окружающей средой, исполнения определенных действий и включает в себя датчик услуг. В качестве окружающей среды рассматривается IHome (интеллектуальный дом) в качестве примера того, как эта система может быть использована на практике.
Принципы
Принципы для МАСМ (MASS) базируются на двух простых, но противоречащих друг другу фактах. Перый из них касается нашей способности точно определить влияние различных стратегий поведения МАС в непредсказуемой обстановке и тем самым менять окружающую действительность. В то же время трудно реалистично смоделировать адаптивне поведение многоагентных систем в статической окружающей среде. Эти два, казалось бы, противоречивыех факта лежат в основе дизайна МАСМ. Существенным преимуществом многоагентных систем (МАSS) по сравнению с традиционной конструкции является то, что такая система является распределенной. Децентрализованность частично автономных и резервных элементов системы делает их менее чувствительными к определенным классам неисправности или атакам. Однако, децентрализация затрудняет анализ этих систем. Как мы можем определить реакции, адаптации или неудачи MAS элементов при возникновении ошибки? Каким образом эти возможности можно отследить с течением времени? Насколько сложно будет создавать экземпляр домена для проверки таких характеристик? В этой статье мы будем рассматривать вопросы, с которыми мы столкнулись при разработке агентов, оценке и координации адаптивных качеств многоагентных систем. В следующих разделах будут описаны наши оценки требований к МАС моделированию и к окружающей срее. В качестве примера окружающей (или тестового домена) среды мы возьмем "Умный дом" (IHome), чтобы описать, как вышеизложенные концепции поведения МАС работают на практике.
Оценка окружающей среды
Многочисленные проблемы возникают, когда должен быть выполнен системный анализ различных алгоритмов и методов. Если метод работает с реальными MAS, можно ли точно знать, что при нескольких подряд запусках мы получим одинаковый результат? Можно ли узнать, что происходит ошибка в одно и тоже время моделирования в нескольких запусках системы? Можно ли гарантировать, что межагентные сообщения не будут задержаны или повреждены?
Если система работает в моделируемых условиях, как узнать, что система будет оптимально реагировать большую часть времени? Сколько различных сценариев необходимо прогнать, чтобы дать однозначный ответ на этот вопрос?
На основании этих замеченных нами особенностей и сложностей, мы попытались разработать окружающую среду, которая позволит нам напрямую контролировать базовые характеристики искусственной среды (т.е. среда должна быть определена нами с начала и до конца моделирования), разрешая добавление "детерминировано случайных" событий, которые могут повлиять на окружающую среду в перспективе. Это позволяет, не нарушая поставленных требований, выполнить полную проверку приспособляемости к окружающей среде.
Хэнкс и др. определили (в источнике [3]) несколько характеристик, которые тренажеры многоагентных систем, должны иметь:
• Экзогенность событий, это позволяет инициировать экзогенные или незапланированные события во время моделирования.
• Реальность сложности - нужно иметь реалистичную симуляцию. Если это возможно, моделируемый мир должен действовать в соответствии с параметрами, измеренными в реальном мире. Имитации поведения сети, например, могут быть основаны на фактических показателей деятельности сети.
• Качество и количество сенсоров симулятора. Хороший симулятор должен иметь простой и действенный интерфейс, позволяющий агентам полно «ощущать» мир.
• Мера выполнении миссии используются агентами для определения того, достигли ли они своей цели, но они не должны иметь непосредственный доступ к ней, т.е. сами определять эффективность своих действий.
• Различные агенты должны присутствовать для имитации междагентных зависимостей, взаимодействия и общения. Тренажер позволяет нескольким агентам и увеличить его сложность и полезность, добавив возможность моделировать другие варианты, такие, как неисправность в потоке сообщений или недопонимание между агентами, задержки в передаче сообщений.
• чистый интерфейс, лежит в основе каждого хорошего тренажера. Мы идем дальше и утверждаем, что агенты и тренажер должны быть запущены в отдельных процессах. Связь между агентами и тренажером должна быть минимальной, чтобы агент не мог делать никаких предположений на основе местных конфигураций, таких как общая память с тренажером или файловых систем.
• для детерминированных тренажера необходимо четко определить модель времени. Каждое происходящее событие может содержать один или больше очков по времени моделирования, которые могут быть связаны по времени с реальным миром.
• необходимо выполнить полное моделироване. Т.е., если потребуется, необходимо добавлять детерменированные события, чтобы быть уверенным, что экспериментальные параметры будут приводить к различным результатам.
Еще одна характеристика, несколько необычная для моделирования сред, это возможность агентов выполнят смесь как реальных, так и симулятивных действий. Например, агент может использовать средства моделирования для выполнения некоторых своих действий, в то время как фактически совершают другие. Исполняемые методы, датчик использования, пространственные ограничения и даже физические проявления относятся к этой категории деятельности, которые на самом деле агент может выполнять или моделируется по мере необходимости. Окружающая среда, обеспечивающая это гибридное существование, предлагает два важных преимущества: более реалистичные условия работы и результаты, а также четкие пути миграции работы из лаборатории в реальный мир. Мы, возможно, вернемся далее к этой теме в последующий разделах.
Мультиагентный симулятор выживаемости
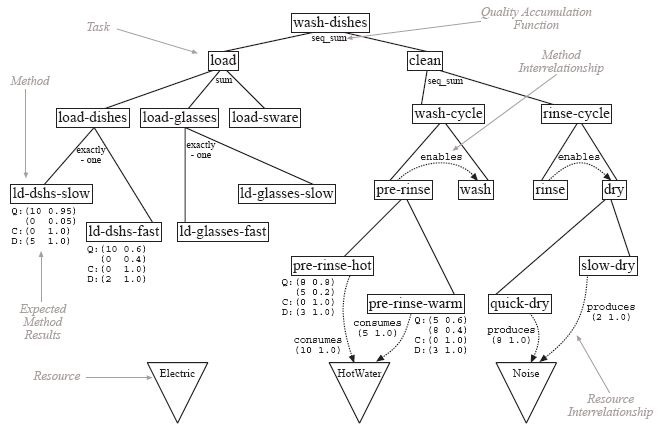
МАСМ является более продвинутым современником TMS симулятора, созданным Деккером и Лесером в 1993 году. Новая МАСМ является полностью независимой от окружающей среды, и все доменные знания (знания об окружающей среде) получены либо из конфигурационных файлов или данных, полученных от агентов, работающих рядом в окружающей среде. Агенты работающие в МАСМ среде используют доменно-независимую, иерархическую структуру целей и возможностей агента (см. Рисунок 1), чтобы представить свои знания, но они четко отделены от тренажера, который обеспечивает более точная модель того, как они будут функционировать в реальных условиях.
Рисунок 1 - Цели и возможности агента
\
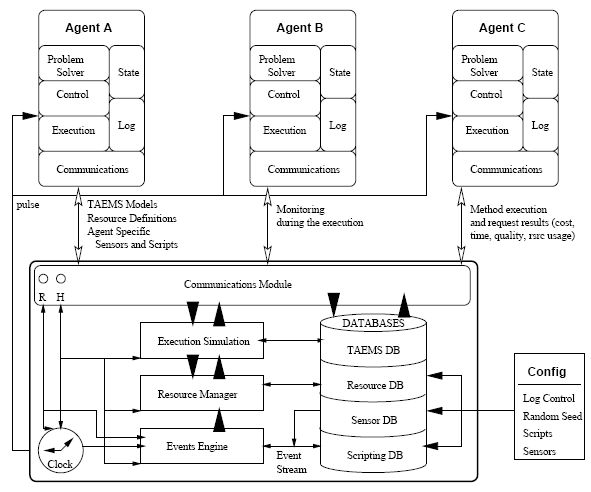
Рисунок 2 - Общая структура МАСМ
\
На Рисунке 2 показана общая структура МАСМ на высоком уровне, и как она взаимодействует с агентами, подключенных к ней. При инициализации, МАСМ считывает из своих файлов конфигурации информацию, которая определяет параметры входа, сценарии (если таковые имеются) и глобальных определения сенсоров. Она используется для создания экземпляров различных подсистем и баз данных. При подключении, агенты отправляют дополнительную информацию для включения в эту конфигурации, что позволяет специализировать характеристики среды для конкретного агента. Пожалуй, самая важная часть данных – это TSM пакет задач, которые храняться в базе данных TSM, как это показано на рисунке. Resource Manager отвечает за отслеживание состояния всех ресурсов в окружающей среде, и ядро событий управляет очередью событий, которые представляют собой фактические действия, которые происходят. Последний компонент - коммуникационный модуль, который поддерживает связь TCP потока с каждым агентом, а также отвечает за маршрутизацию различных видов сообщений между собой и агентом, и их правильного назначения внутри контроллера.
У контроллера МАСМ есть несколько задач, которые он выполняет в ходе поделирования. К ним относятся: маршрутизация трафика сообщений на правильные направления, обеспечивая возможность агентам «ощущать» виртуальную среду и рационально использовать различные ресурсв. Его главная задача, однако, имитировать выполнение методов по запросу агентов. Каждый агент видит окружающую среду лишь частично, как правило, описывая локальное представление о цели и возможных решений, которое определяет ожидаемые значения в результате такого исполнения. Этот взгляд на мир местного агента называется его субъективной точкой зрения. Тренажер имеет свой собственный взгляд на мир ("правильный" , который мы называем объективным взглядом), который он использует для вычисления результатов моделирования. Инженерные различия между субъективным и объективным взглядом позволяют реализовать широкий спектр сценариев моделирования.
Теперь дадим характеристику TMS и покажем, как она используется для имитации моделирования, читатель должен обратиться к источникам [5, 1] для более подробной информации. В TMS каждый метод описан по трем направлениям: затраты, качество и продолжительность, каждое из которых описывается дискретным распределением вероятностей. Качество представляет собой любое значение метода или параметра. Тренажер при расчете значения для метода моделирования использует распределение вероятностей в его объективном виде. Отметим также, что это вероятностное распределение обеспечивает средние значения результатов в случае, если симулятор будет понижать или повышать результаты по мере необходимости, если, например, необходимые ресурсы недоступны, или при других действиях в среде.
Вторая задача, которая занимает большую часть внимания симулятора, является маршрутиззация сообщений агентов. Агенты отправляют и посылают свои сообщения через симулятор, что позволяет прогонять модель при неблагоприятных условиях в сети при непредсказуемыех задержках и сбоях передачи. Маршрутизация также играет важную роль в общем детерминизме окружающей среды, так как это позволяет контролировать порядок получения сообщений от начала и до конца моделирования.