Источник: http://www.qi.tnw.tudelft.nl/Courses/FIP/noframes/fip-Segmenta.html
Автор перевода: Надежда Галах
Сегментация
- Сегментация по порогу
- Пограничный (краевой) поиск
При анализе объектов изображения очень важно, что мы можем различать объекты, представляющие интерес и "остальные". Эта последняя группа, также упоминается в качестве фона. Методы, которые используются, чтобы найти объекты, представляющие интерес, как правило, называют методы сегментации - сегментирование переднего плана от фона. В этом разделе мы рассмотрим два из наиболее распространенных методов - определение порога и края поиска - и современные техники для улучшения качества результата сегментации. Важно понимать, что:
- Нет универсально- применимой техники сегментации, которая будет работать для всех изображений, и,
- нет совершенной техники сегментации.
Сегментация по порогу
Этот метод основан на простой концепции. Параметр, называемый порогом яркости выбирается и применяется к изображению a[m,n] следующим образом:
![]()
Эта версия алгоритма предполагает, что мы заинтересованы в светлых предметах на темном фоне. Для темных объектов на светлом фоне мы хотели бы использовать:
![]()
Выходная метка "объект" или "фон", которая, благодаря своему дихотомическому характеру, может быть представлена в виде булевой переменной "1" или "0". В принципе, условия тестирования могут быть основаны на некоторых других свойствах, как простая яркость (например, если (покраснение {a[m,n]}> = красный цвет), но концепция ясна.
Центральным вопросом в сегментации по порогу становится: как мы можем выбрать порог? Хотя не существует универсальной процедуры отбора порога, который гарантирует работу на всех изображениях, есть целый ряд альтернатив.
1. Фиксированный порог - один из вариантов заключается в использовании порога, который выбран, независимо от изображения. Если известно, что мы имеем дело с очень высокой контрастностью изображения, на которых объекты очень темные, а фон однороден (раздел 10.1) и очень светлый, постоянный порог 128 по шкале от 0 до 255 может быть достаточно точным. По точности мы имеем в виду, что количество ошибочно классифицированных пикселей должно быть сведено к минимуму.
2. Гистограмма полученных порогов - в большинстве случаев порог выбирается из гистограммы яркости области изображение, которое мы хотели бы сегментировать. (См. разделы 3.5.2 и 9.1.) Изображение и связанную с ним гистограмму яркости показано на рисунке 51.
Различные методы были разработаны, чтобы автоматически выбрать порог, начиная с гистограммы серого, {h[b] | b = 0, 1, ... , 2B-1}. Некоторые наиболее распространенные из них представлены ниже. Многие из этих алгоритмов могут извлечь выгоду из сглаживания исходных данных гистограммы, чтобы удалить мелкие колебания, но алгоритм сглаживания не должен срезать пиков. Это приводит к фаза-нуль алгоритмам сглаживания приведены ниже, где типичные значения для W 3 или 5:
![]()

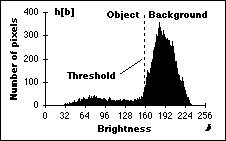
(А) изображение, которое будет сегментировано по порогу (б) Гистограмма яркостей изображения
Рисунок 51 - Пиксели ниже порогового (a[m,n] < ) Будут помечены как пиксели объекта, а выше порога будут помечены как фон
* Isodata алгоритм - это итерационный метод выбора порога, который был разработан Ридлером и Калвардом. Гистограмма изначально разделена на две части, используя начальное пороговое значение, такое как 0 = 2B-1, наполовину максимальный динамический диапазон. Вычисляются выборочное среднее (mf, 0), связанное c передним планом пикселей и выборочное среднее (mb,0), связанное с фоном пикселей. Новое значение порога 1 теперь рассчитывается как среднее значение этих двух выборочных средних. Процесс повторяется, основываясь на новом пороге, до тех пор пока пороговое значение не будет вносить никаких изменений больше. В формуле:
![]()
1. Алгоритм фоновой-симметрии - Этот метод предполагает четкость и доминирующий пик фона, являющийся симметричным относительно своего максимума. Метод может использовать сглаживания, как описано в эквиваленте. Максимальный пик (maxp) находится путем поиска максимального значения в гистограмме. Затем алгоритм поиска пикселей не-объекта в стороне от этого максимум, для нахождения точки р%, как в эквиваленте. (39).
На Рисунке 51B, где пиксели объекта расположены слева от фона пик яркости 183, это означает поиск справа от этого пика, чтобы найти, как, например, 95% стоимости. На этом значение яркости, 5% точек лежат справа (выше) значения. Это происходит при яркости 216. Из-за предположить симметрии, мы используем в качестве порогового смещение слева от максимума, который равен смещение вправо, где р% не найдено. Для рис 51B это означает, пороговое значение определяется 183 - (216 - 183) = 150. По формуле:
![]()
Этот метод можно легко адаптировать к случаю, когда у нас есть светлые предметы на темном доминирующем фоне. Кроме того, он может быть использован, если пик объекта доминирует, и у нас есть основания считать, что распределение яркости по всему объекту на пике является симметричной. Дополнительные вариации на тему этой симметрии является использование оценки стандартного отклонения выборки (в ур. (37)), основанной на одной стороне доминирующего пика, а затем использовать порог на основе = Maxp + / - 1,96 сек (при 5% уровне) или = Maxp + / - 2,57 сек (при уровне 1%). Выбор "+" или "-" зависит от того, в каком направлении от maxp в настоящее время определяется как объект/фон порога. В случае, если распределение будет приблизительно гауссовым вокруг maxp, то значения 1,96 и 2,57, по сути, соответствует 5% и 1% уровням.
2. Алгоритм треугольника - этот метод благодаря Заку [36] показан на рисунке 52. Линии, построенные между максимумом гистограммы яркости b0 и наименьшим значением мин = (р = 0)% в изображении. Расстояние d между прямой линией и гистограммой h[b] вычисляется для всех значений b от Ьb = мин b = макс b. Значение яркости b0, где расстояние между h[bo] и линией максимального порогового значения, то есть, = bo. Этот метод особенно эффективен, когда объект пикселей имеет слабый пик на гистограмме.
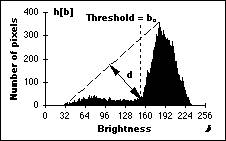
Рис 52 - алгоритм треугольника основан на нахождении значения b, что дает максимальное расстояние d.
3 процедуры, описанные выше, дают значения = 139 для алгоритма Isodata, = 150 для алгоритма симметрии фона на уровне 5%, а = 152 для алгоритма треугольника для изображения на рисунке 51а.
Сегментация по порогу не должна применяться ко всему изображению, но может быть использованы на основе области. Чоу и Канеко разработали вариант, в котором MхN изображение делится на непересекающиеся области. В каждой области порог рассчитывается и в результате пороговые значения вместе (с интерполяцией) используются для формирования пороговой поверхности всего изображения. Регионы должны быть "разумными" размер чтобы было достаточное количество пикселей в каждом регионе, с просьбой произвести оценку гистограммы и порог. Польза от этой процедуры - как и многие другие - в зависимости от существующих данных.
Пограничный поиск
Порог производит сегментацию, которая дает все пиксели, которые, в принципе, принадлежат объекту или объектам, представляющим интерес на изображении. Альтернативой этому является, нахождение тех пиксели, которые принадлежат границам объектов. Методы, которые направлены к достижению этой цели, называются пограничным поиском. Из нашего обсуждения в разделе 9,6 по математической морфологии мы видим, что существует тесная взаимосвязь между краями и областями.
1. Базовая градиентная процедура - главная задача методов поиска края является поиск процедур, которые производят замкнутые контуры вокруг всех объектов, представляющих интерес. Для объектов, особо высокой SNR, это может быть достигнуто путем вычисления градиента, а затем с помощью подходящего порога. Это проиллюстрировано на рис 53.
(А) SNR = 30 дБ (б) SNR = 20 дБ
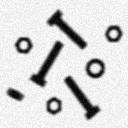
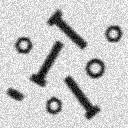
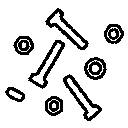
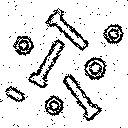
Рис. 53 - на краю поиска на основе градиента Собел, в сочетании с пороговым алгоритмом Isodata
Хотя метод хорошо работает для 30 дБ изображение на рис 53а, в нем не содержится четкого определения этих пикселей, ассоциированные с объектом краями для 20 дБ изображение на рис 53B. Различные методы сглаживания, как описано в разделе 9.4 могут быть использованы для снижения шумового воздействия до применяется оператора градиента.
2. Процедура Ноль- пересечения - более современный вид обработки проблемных краев в шумных изображениях на применение нулевых переходов генерируется в лапласиане изображений (раздел 9.5.2). Обоснование начинается от модели идеального края, ступеньки, который был смазан OTF, такие как Таблица 4 T.3 (вне фокуса), T.5 (дифракционной), или T.6 (в целом модель), чтобы произвести результат, показанный на рисунке 54.
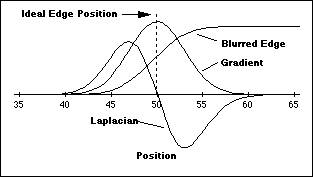
Рис. 54 - на краю поиска на основе пересечения нуля, как определяется второй производной, оператор Лапласа. Кривые не в масштабе.
Расположение края, согласно модели, в том месте, в котором изображение Лапласа меняет знак, переходит через нуль. Операция Лапласа связана со второй производной, это означает потенциальный шум в изображении при высоких пространственных частот; см. экв. (114). Чтобы предотвратить расширение шума со стороны доминирующих нулевых переходов, сглаживания не требуется.
Соответствующие сглаживающий фильтр, из многих возможностей описанных в разделе 9.4, должны в соответствии с Каннами, обладают следующими свойствами:
- В
частотной области, (U, V) или (
 ,
, ).
Фильтр должен быть как можно более узким, чтобы обеспечить
подавление высокочастотных помех, а также;
).
Фильтр должен быть как можно более узким, чтобы обеспечить
подавление высокочастотных помех, а также;
- В области пространства (х, у) или [т, п], фильтр должен быть как можно более узким, чтобы обеспечить хорошую локализацию края. Слишком широкий фильтр создает неопределенность в отношении того, где именно, в фильтре ширины, край находится.
Сглаживающий фильтр, который одновременно удовлетворяет оба эти свойства - минимальная пропускная способность и минимальная пространственная ширина - гауссов фильтр описан в разделе 9.4. Это означает, что изображение должно быть сглажено по Гауссу соответственно с последующим применением лапласиана. В формуле:
![]() ,
,
где g2D(x,y) определено в экв. (93). Производной операции линейного и инвариантное относительно сдвига, как это определено в формулах (85) и (86). Это означает, что для операторов могут быть обменены (уравнение (4)) или в сочетании в одном фильтре (уравнение (5)). Этот второй подход приводит к Марр-ildreth формулировке "Лапласа-Гаусса" фильтр:
![]()
где
![]()
С учетом круговой симметрии это также может быть записан как:
![]()
Это 2-мерное ядро свертки, которое иногда называют "фильтр мексиканская шляпа", представлен на рисунке 55.
() - Вход (х, у) (б) LoG (г) 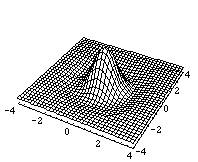
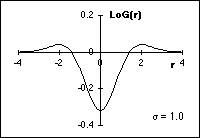
Рис. 55 - фильтр с параметрами = 1,0.
- PLUS процедура - среди нуль процедур пересечения края обнаружения, пожалуй, наиболее точным является PLUS фильтр, разработанный Вербиокм и Ван Влиетом.
Фильтр определяется с помощью уравнения. (121) и (122), как:
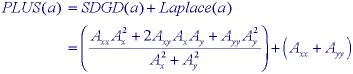
Ни при выводе PLUS свойств, ни оценки его точности в рамках этого раздела. Достаточно сказать, что для положительно изогнутыми краями изображения в серых значениях лапласиана основе нулевого порядка пересечения переоценивает положение края и SDGD на основе процедуры недооценивает положение. Это верно как в 2-мерных и 3-мерных изображениях с точностью порядка (/R)2, где R-радиус кривизны края. PLUS оператор имеет ошибку на порядок (/R)4, если изображение на пробы, по крайней мере, 3х обычных Котельникова частоты, как в экв. (56), или если мы выбираем > = 2,7 и образца с обычной частотой Найквиста.
Все методы, основанные на нулевом пропускном пункте в лапласиане должны уметь различать между нулевым переходом и нулевым значением. Если первые представляют края, последние могут быть получены по областям, которые не являются более сложными, чем билинейных поверхности, т. е. (х, у) = 0 + 1 * х + 2 * у + 3 * х * у. Чтобы различать эти две ситуации, мы первым находим пересечение нуля позиции и обозначить их как "1" и всех других точки "0". Затем мы умножим получившееся изображение на меру края в каждой точке. Существуют различные меры по краю силой, что все зависит от градиента как описано в разделе 9.5.1 и эк. . Это последняя возможность, использования морфологических градиентов изменения силами края, была впервые описана Ли и Шапиро и особенно эффективен. После умножения изображения затем сегментации по порогу (см. выше) для получения окончательного результата. Процедура выглядит следующим образом:
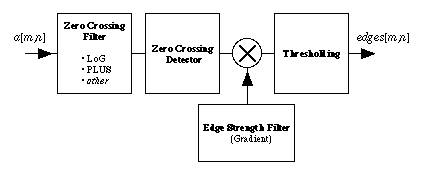
Рисунок 56 - Общая стратегия по краям, на основе нулевого переходах.
Результаты этих двух методов краевого поиска, основанных на нулевых переходах, LoG фильтрацию и фильтрацию PLUS, показаны на рисунке 57 для изображений с 20 дБ SNR.



а) Image SNR = 20 дБ б) LoG фильтр с) PLUS фильтр
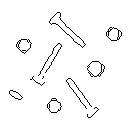
Рисунок 57: на краю поиска с помощью нулевого пересечения алгоритмы LoG и PLUS. В обоих алгоритмов = 1,5
Методы пограничного поиска обеспечивают, как и предполагает название, изображение, содержащее края пикселей. В случае, если краевые пиксели соответствуют объектам, не говоря о простых линиях в изображении, используются техники для обеспечения полного заполнения объектов.