
In God we trust
Автор- Подпорин С.А., Олейников А.М.
Название- ПЕРСПЕКТИВЫ ИСПОЛЬЗОВАНИЯ НЕЙРО-НЕЧЕТКИХ И ГИБРИДНЫХ ТЕХНОЛОГИЙ В СИСТЕМАХ УПРАВЛЕНИЯ ДВИЖЕНИЕМ МОРСКИХ СУДОВ
Введение. Международная морская организация (IMO) стремится минимизировать влияние человеческого фактора при возникновении происшествий и аварий, связанных с эксплуатацией судна, постоянно ужесточая требования к системам судовой автоматики. Безопасность эксплуатации морского судна, как известно, напрямую связана с обеспечением его безопасного движения, особенно в ситуациях расхождения с другими судами, маневрирования в узкостях и движения в условиях сильного морского волнения. В этой связи, создание универсальной системы автоматического контроля и управления движением судна на курсе и траектории является актуальной и важной задачей, призванной повысить безопасность мореплавания, снизить эксплуатационные потери и освободить штурманский состав от постоянной вахты на руле.
Постановка задачи исследования:
Настоящая работа ставит целью рассмотреть и проанализировать перспективы и возможности применения интеллектуальных систем (в том числе нейро-нечетких и гибридных) для решения задачи автоматического управления движением морского судна.
Материалы исследования
Применение традиционных методов теории автоматического управления (ТАУ) для решения поставленной задачи на сегодняшний день представляется довольно затруднительным в силу следующих особенностей морского судна как управляемого объекта [1]:– большая инерционность;
– неполная управляемость и возможность потери управляемости;
– влияние на динамические свойства судов изменений загрузки и путевых условий;
– различия в управляемости из-за многообразия движительно-рулевых комплексов, размеров, форм корпуса;
Таким образом, судно представляет собой сложный, существенно нелинейный динамический объект, построение адекватной математической модели которого представляет серьезные трудности. Рассматривая процесс моделирования систем автоматического управления курсом судна (САУКС), традиционная теория управления идет на ряд очень существенных упрощений (постоянство скорости и осадки судна, отсутствие турбулентности вокруг корпуса, незначительные углы перекладки руля и др.). В результате, в практике инженерных расчетов судно обычно моделируется апериодическим звеном второго порядка с интегратором (модель Номото 2-го порядка). При создании адаптивных систем автоматического управления движением судна подобная упрощенная модель не может использоваться в качестве эталонной, поскольку она не в состоянии корректно описывать меняющуюся динамику судна [2, 4]. В условиях управления сложными, плохо формализованными объектами успешно зарекомендовали себя интеллектуальные методы управления [3, 4], реализованные на искусственных нейронных сетях (ИНС), нечеткой логике, идеях синергетики.
Среди успешно решаемых с помощью ИНС задач особо стоит отметить задачи идентификации и управления. Процесс идентификации морского судна (т.е. осуществление его адекватного математического описания как объекта управления) в рассматриваемой задаче классическими методами ТАУ, как уже отмечалось, является довольно затруднительным в силу чрезмерно громоздкого математического аппарата. Однако применение нейронных сетей позволяет избавить разработчиков от этих сложностей. Для успешной идентификации управляемого объекта достаточно наблюдать его в основном рабочем диапазоне, составляя при этом базу данных «вход-выход», используемую в дальнейшем в качестве обучающей выборки. Применив процедуру обучения к нейронной сети определенной архитектуры на достаточном количестве примеров, можно добиться практически полной идентификации объекта. Стоит отметить, что выбор архитектуры и типа ИНС должен быть сделан обоснованно, с учетом сложности реального объекта управления. Полученная таким образом прямая нейросетевая модель может в дальнейшем быть использована в контуре адаптивного управления. Методы нейронного управления, подробно описанные в [3], в основном базируются на использовании инверсной модели управляемого объекта, которая может быть получена аналогично образом.
В качестве объекта для исследования авторами было выбрано пассажирское судно длиной 171 м. В силу известных сложностей с натурными испытаниями, исследования проводились на полномасштабном симуляторе ходового мостика судна Navi-Trainer 4000 фирмы Transas. В результате испытаний составлена обучающая выборка образцов для обучения прямой и инверсной нейросетевой модели. В качестве контура нейронного управления была выбрана схема, представленная на рис. 1. В качестве среды моделирования и обучения нейронных сетей использовался инженерный пакет Matlab 7,0 с расширением Neural Networks Тoolbox. Функциональная схема системі управления судном с нейроєммулятором и нейроконтроллером приведена на рис.1.

Рис.1. Схема нейроуправления с эталонной моделью (эмулятором) и контроллером: у – выход системы; – выход эмулятора; u – управление; r – вход в систему управления; – выход эмулятора; u – управление; r – вход в систему управления; – ошибка эмуляции; е – ошибка системы – ошибка эмуляции.
Переходный процесс, описывающий изменение курса судна K(t) на небольшую величину в автоматическом режиме, представлен на рис. 2 (верхний график). Отработка пера руля u(t) при этом показана на нижнем графике. Результаты моделирования в других режимах (волнение, резкие параметрические возмущения и др.) описаны авторами в работе [4].
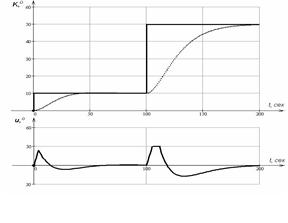
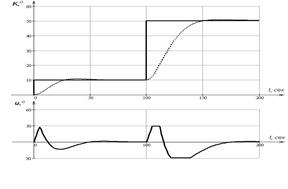
Из графика видно, что нейросетевая система способна качественно, без перерегулирования выводить судно на новый курс. Для сравнения на рисунке 3 приведен аналогичный переходный процес в САУКС с ПИД-регулятором, наиболее широкоиспользуемым в настоящее время в судовых авторулевых. Очевидно, что ПИД-алгоритм сильнее нагружает рулевую машину и выводит судно на новый курс с небольшим перерегулированием. Стоит отметить, что недостатком нейронных сетей в управлении является необходимость их обучения, что в общем случае является довольно трудоемкой задачей. Как показывает практика, итог обучения может быть не всегда очевиден и корректен.
На сегодняшний день интенсивные разработки ведутся в области создания систем управления движением судов на нечеткой логике и гибридных сетях, сочетающих нейронный и нечеткий подход с генетическими методами настройки параметров. Так, компания Sperry Marine уже заявила о создании и успешном внедрении судового авторулевого на нечеткой логике (модель NaviPilot AD II). По понятным причинам, конкретные схемные реализации и алгоритмы компания не раскрывает.
Достоинством нечетких систем управления является их способность работать с качественной информацией, преобразуя и обрабатывая ее в численной форме. При этом в нечетких системах в сравнении с линейными существует гораздо больше возможностей учесть нелинейную динамику объекта управления, например с помощью нелинейных функций принадлежности. Работы авторов в этой области [5, 6] направлены на исследование и моделирование нечеткого контроллера в САУКС. В них показано, что нечеткий контроллер способен работать как минимум не хуже чем традиционный ПИД-регулятор, однако нечеткая система управления не является в полной мере самонастраивающейся. Для реализации самонастройки как вариант может использоваться нейро-нечеткая структура типа ANFIS [7].
Еще одним методом повышения качества управления движением судов является использование генетического алгоритма (ГА) для поиска оптимальных решений в судовых системах. Применительно к решению поставленной задачи, такими системами являются:
– система САУКС, где в качестве настраиваемых генетическим методом параметров могут быть параметры ПИД-регулятора авторулевого [8], формы функций принадлежности нечеткого регулятора, коэффициенты усиления нечеткого регулятора , а также сами базы нечетких правил;
– система планирования перехода судна, где с помощью ГА на основании имеющейся априорной информации осуществляется выбор маршрута судна по путевым точкам с учетом того или иного критерия оптимальности [9];
– системы оценки и оптимизации мореходности судна, предоставляющие судоводителю информацию об оптимальном с точки зрения безопасности режиме плавания в условиях штормового волнения.
Выводы
1. Современные подходы к управлению движением судна с использованием нейро-нечетких и гибридных интеллектуальных систем вполне обоснованы и актуальны. Однако данная область требует дополнительных исследований.
2. Разработка подобных систем для отечественного морского флота позволит Украине стать конкурентно способной на мировом рынке навигационных систем.
3. Нейросетевые технологии все же нельзя считать глобальной панацеей и следует искать новые, более совершенные способы управления сложными системами.
Литература.
1. Вагущенко Л.Л., Цымбал Н.Н. Системы автоматического управления движением судна. – Одесса: Латстар, 2002. – 310 с.
2. Fossen T. I. Guidance and Control of Ocean Vehicles. – New-York: John Wiley & Sons, 1994. – 494 p.
3. Омату С., Халид М., Юсуф Р. Нейроуправление и его приложения. – М.: Изд. Предприятие редакции журнала Радиотехника, 2000. – 272 с.
4. Богданов В.И., Виткалов Я.Л., Подпорин С.А. Синтез нейросетевых синергетических систем управления судном. Монография. – Москва – Санкт-Петербург – Владивосток – Севастополь: Питер, 2006. – 204 с.
5. Богданов В.И. Подпорин С.А. Использование нечеткой логики для повышения качества управления судном на курсе // Сб. научных трудов / СВМИ им. П.С. Нахимова. – Вып. 2(8). – Севастополь, 2005. – С. 89 – 97.
6. Богданов В.И., Подпорин С.А., Потапов А.С. Синергетический подход к задаче оптимизации качества управления судном на курсе // Сб.: Проблемы и методы разработки и эксплуатации вооружения и военной техники ВМФ. – Владивосток, ТОВМИ, 2006. – Вып. 57. – С. 29 – 34.
7. Методы робастного, нейро-нечеткого и адаптивного управления: Учеб. для вузов/ Под ред. Н.Д. Егупова. – 2 изд. – М.: Изд-во МГТУ им. Н.Э. Баумана, 2002. – 743 с.
8. Богданов В.И., Подпорин С.А. Оптимизация параметров судового ПИД-регулятора с помощью генетического алгоритма // Оптимизация производственных процессов: Сб. научных трудов/ Севастопольский национальный технический университет. – Вып. 7. – Севастополь, 2004. – С.184 – 189.
9. Вагущенко Л.Л., Вагущенко А.Л., Заичко С.И. Боротовые автоматизированные системы контроля мореходности. – Одесса: Феникс ,2005. – 274 с.