Вернуться в библиотеку
SmartSnap: addressing 3D pointing anisotropy in Virtual Reality CAD application
Аuthors: Michele Fiorentino, Giuseppe Monno, Antonio E. Uva. SmartSnap
Source: http://www.graphicon.ru/2004/Proceedings/Technical/s1[5].pdf
Abstract
Developing an industry-complaint virtual reality CAD application is difficult because of the limited understanding of the interaction techniques in virtual environments. The aim of this paper is to give a qualitative and quantitative evaluation of human precision with a 3D direct spatial input during a VR modeling session. In particular we focused on a set of frequent tasks performed in a 3D CAD system: pointing, picking and line sketching. For this purpose, we developed a specific application called SpaceXperiment to support our experiments. All the performed tests show that that user looses precision easier along the direction perpendicular to the projection screen, that we call depth direction. The pointing precision and accuracy values measured by SpaceXperiment allowed the design of drawing aids such as ‘snaps’ and ‘grips’ which are essential to assist the user during modeling sessions in a 3D CAD environment. The quantitative results of the tests leaded to the development of an innovative ellipsoid shaped snap called “SmartSnap”, which overcomes the high pointing anisotropy preserving high snap resolution. The presented results offer a significant contribution for developers of modeling applications in Virtual Reality.
1. INTRODUCTION
One of the most limiting factors for 3D modeling, as established by
many studies [24] [12], is the use of two degrees of freedom
devices (monitor, keyboard and mouse) for creating 3D forms.
Nowadays, virtual reality technology provides an enhanced
interface, based on stereographic vision, head tracking, real time
interaction and six degrees of freedom (6DOF) input. This VR
based interface is thus candidate to be the ideal workspace for next
generation 3D modeling applications.
Virtual environment interaction paradigm is often based upon direct
manipulation, which allows a effective transfer of object
manipulation skills developed in the physical world into humancomputer
interaction (HCI). Direct object manipulation generally
involve three elements: a controller, the physical device held in the
user hand, a cursor, which is the virtual representation of the user
finger, and a target, which is a particular hot spot in the virtual
environment. [21].
Thanks to the recent developments in tracking system technology,
new interesting insights of HCI in virtual reality can be carried out.
In fact, previous tracking systems, like magnetic and acoustic ones,
suffered from drawbacks in precision, latency, resolution and
repeatability of measurements [15]. Due to this reason, much of the
research effort was diverted towards tracking error reduction,
filtering and position prediction. Newly developed high precision
optical systems [1] consent nowadays a better understanding of
spatial input human interaction. Different factors can be isolated and
analyzed: limb posture, speed, and direction.
The term spatial input or 3D input refers in this work to interfaces
based upon free space technologies such as camera-based or
magnetic trackers, as opposed to desktop devices such as the
mouse or the Spaceball [10].
In particular, the interaction in Virtual Environments (VE) has been
proven to be strictly application and hardware dependent [3].
Literature on the specific modeling purpose is actually limited to
isolated experimental implementations, and results are far to be
systematic and generically applicable. The not completely explored
3D input\output interface limits nowadays the use of Virtual Reality
(VR) only to academic and research world.

In order to develop a virtual reality CAD application which really
takes advantages of the stereoscopic visualization and the six
degree of freedom (6DOF) input, a contribution is needed in the
understanding the principles and the rules which govern the
modeling tasks in a virtual environment.
The ongoing development by the authors of the Spacedesign
application [6], a VR based CAD system (VRAD), has given rise to
different issues concerning the interface design optimization such as:
widget and snap dimension, tracking filtering and user’s intention
recognition. A VR application, called SpaceXperiment, has been
thus developed to provide a configurable and systematic test bed for
the 3D modeling interaction. The influencing parameters and the
correlations among them are analyzed and discussed in order to
improve the VRAD Spacedesign application.
The purpose of this work is to examine human bias, consistency and
individual differences when pointing, picking and lines sketching in a
virtual environment, and therefore to provide useful information for
future computer interface design.
The goal of this work is to study those elements specifically for a
modeling application by collecting significant data regarding user’s
sessions and configuring parameters and tools in order to improve
the effectiveness of the interface. The literature about this topic is
wide but very scattered as underlined in the next section.
2. RELATED WORK
Human computer interface within a 2D environment has been is
object of study since the introduction of the computer. The simplest
form of interaction, the pointing, has been investigated for different
devices by many authors using the Fitts’ law in various forms [7]
[13].
Hinckley [9] presents an interesting survey of design issues for
developing three-dimensional user interfaces, providing suggestion
and examples. The main contribution is the synthesis of the
literature available scattered results, observations, and examples into
a common framework, in order to serve as a guide to researchers or
systems builders who may not be familiar with spatial input.
Graham et al. [8] explore 3D spatial pointing by comparing virtual
and physical interaction, using a semi-transparent monoscopic
display and a 3D tracking system. Two different approach are
tested: a virtual mode, displaying only computer generated images,
and a physical mode, where the graphics display is turned off and
the subjects can see through the mirror to the workspace below.
The results suggest that movement planning and kinematic features
are similar in both conditions, but virtual task takes more time
especially for small targets. Moreover changes in target distance
and width effect the spatial temporal characteristics of pointing
movement.
Bowman [3] et al. develop a test bed to compare different basic VR
interaction techniques for pointing, selection and manipulation. The
authors note that the performance depends on a complex
combination of factors including the specific task, the virtual
environment and the user. Therefore applications with different
requirements may need different interaction techniques.
Poupyrev et al. [17] develop a test bed which evaluates
manipulation tasks in VR in an application-independent way. The
framework provides a systematic task analysis of immersive
manipulation and suggest a user-specific non Euclidean system for
the measurement of VR spatial relationship.
Mine et al. [14] explore manipulation in immersive virtual
environments using the user’s body as reference system. They
present a unified framework for VE interaction based on
proprioception, a person's sense of the position and orientation of his
body and limbs. Test are carried out about the body-relative
interaction techniques presented.
Wang et al. [25] investigate combined effects of controller, cursor
and target size on multidimensional object manipulation in a virtual
environment. Test revealed that the same size of controller and
cursor improved object manipulation speed, and the same size of
cursor and target generally facilitate object manipulation accuracy,
regardless their absolute sizes.
Paljic [16] reports two studies on the Responsive Workbench. The
first study investigates the influence of manipulation distance on
performance in a 3D location task. The results indicate that direct
manipulation and 20 cm distance manipulation are more efficient
than for 40 and 55 cm distances. The second study investigates the
effect of two factors: the presence or absence of a visual clue, and
the scale value, which is a variation of the scale (1 or 1.5) used to
map the user's movements to the pointer. Task performance is
significantly lower when using the visual clue, and when using the
1.5 scale.
Boritz [2] investigate the ability to interactively locate points in a
three dimensional computer environment using a six degree of
freedom input device. Four different visual feedback modes are
tested: fixed viewpoint monoscopic perspective, fixed viewpoint
stereoscopic perspective, head-tracked monoscopic perspective and
head-tracked stereoscopic perspective. The results indicate that
stereoscopic performance is superior to monoscopic performance
and that asymmetries exist both across and within axes. Head
tracking had no appreciable effect upon performance.
Zhai [28] presents an empirical evaluation of a three-dimensional
interface, decomposing tracking performance into six dimensions
(three in translation and three in rotation). Tests revealed subjects’
tracking errors in the depth dimension were about 45% (with no
practice) to 35% (with practice) larger than those in the horizontal
and vertical dimensions. It was also found that subjects initially had
larger tracking errors along the vertical axis than along the
horizontal axis, likely due to their attention allocation strategy.
Analysis of rotation errors generated a similar anisotropic pattern.
Moreover, many authors [19][4][11][5] developed virtual reality
based CAD applications, describing the specific implementation and
the results achieved. But such contribution are often single and
isolated study, without a systemic performance evaluation and the
definition of precise guidelines.
From the related work presented, it can be summarized that
literature offer several approaches to human interaction
understanding in virtual reality. Previous work has also shown how
interaction techniques in virtual environments are complex to
analyze and evaluate, because the variety of hardware configuration
(immersive VR, semi-immersive VR, desktop VR, type of input
devices) and the specific application. Some approaches try to be
more general decomposing each interaction into smaller task, but
specific study is necessary. This paper gives a practical and
substantial contribution for CAD modeling applications.
In the next section we illustrate our experimental approach for the
interaction evaluation within our VR CAD system. In particular we
analyze pointing, picking and lines sketching interaction tasks.
3. EXPERIMENT DESIGN
The aim of this paper is to give a qualitative and quantitative evaluation of human performance in a virtual environment while performing modelling tasks. For our tests we selected a set of the most frequent tasks performed in a CAD system: pointing, picking and line sketching. These tasks are similar for both 2D and 3D CAD system. Using stereoscopic display and a 6DOF tracked pointer, the following tests were carried out:
- the measurement of the ability of the user in pointing a fixed point;
- the analysis of the sketched lines traced by the user when following a virtual geometry, in order to discover preferred sketching methods and modalities;
- the user’s the ability to pick points in 3D space in order to evaluate human performance in object selection.
International Conference Graphicon 2004, Moscow, Russia, http://www.graphicon.ru/ SpaceXperiment application was used for these tests. Position, orientation and timestamp of the pointer (pen tip) was recorded, for every test, for subsequent analysis.

3.1 Participants
Voluntary students from the faculty of mechanical engineering and
architecture were recruited for the tests. All participants were
regular user of a windows interface (mouse and keyboard). None
had been in a VR environment before. All the user were given a
demonstration of the SpaceXperiment system and were allowed to
interact in the virtual workspace for approximately 20 minutes in
order to become acquainted with the perception of the virtual 3D
space. Moreover all the user performed a double set of tests. The
first set was considered a practice session and the second a data
collection session. All subjects were right handed, and had normal or
corrected-to-normal vision. Subjects had experience using a
computer. Informed consent was provided before the experiment.
3.2 Apparatus
The experiments were conducted in the VR3lab at the Cemec of
the Politecnico di Bari, on the VR facility which normally runs the
Spacedesign application. Our experimental test bed comprises of a
hardware system and a software application called
SpaceXperiment.
3.2.1 Hardware
The Virtual reality system used for the experiments is composed by
a vertical screen of 2.20m x 1.80m with two polarized projectors
and an optical 3D tracking system by Art [ART]. Horizontal and
vertical polarized filters in conjunction with the user’s glasses make
possible the so called passive stereo vision. The tracking system
uses two infrared (IR) cameras and IR-reflective spheres, the
markers, to calculate their position and orientation in space by
triangulation. The markers, which are of 12mm of diameter, are
attached to the interaction devices according a unique pattern which
allows them to be identified by the system. The user handles a
transparent Plexiglas pen with 3 buttons, which is represented in VR
with a virtual simulacrum. The user is also provided with a virtual
palette (a Plexiglas sheet) that can be used to retrieve information
and to display the virtual menus and buttons (Figure 1, 2).
An Dtrack motion analysis system, based on two ARTtrack1
cameras, records the three-dimensional position of infrared markers
placed on the user’s devices, and stores the results in data files for
further analysis.
A stereoscopic, head coupled graphical display was presented on th
screen, using orthogonally polarized glasses. The experiment was
conducted in a semi-dark room.
3.2.2 Software implementation
SpaceXperiment is the application addressed to the testing of 3D
interaction in a virtual reality environment. It is built upon the
Studierstube library [Schmalstieg 1996], which provides the VR
interface, the so-called Pen and tablet metaphor: the non-dominant
hand holds the transparent palette with virtual menus and buttons;
the other handles the pen for application-related tasks.
The incoming data from the tracking system are sent directly by
ethernet network to the SpaceXperiment application via the
OpenTracker library. This is an open software platform, based on
XML configuration syntax, is used to deal with tracking data from
different sources and control the transmission and filtering.
The system is set up in such a way that the size of the virtual
objects displayed on the screen corresponded to their real
dimensions. Because of the similarity of the platform between
SpaceXperiment and Spacedesign, test results from former can be
easily applied to the latter.
3.2.3 Tracking system calibration
After following the correct calibration procedure for the tracking
system, as described by the manufacturer, we performed a series of
tests to verify the precision and accuracy of the tracking system by
Art. We fixed the markers in 10 different position of the tracking
volume and recorded the measures of the system.
We find out that the system is capable to perform an average
precision of 0.8 mm in the position of the target. This result is
compatible with the manufacturer specification (0.4 mm) because
our system if provided of only two cameras vs. the four cameras
used for the tech. specification. In any cases this error is way lower
than the expected measure values, therefore we can be confident
that our future evaluations will be free of systematic measure error.
4. EXPERIMENT 1: POINTING STATIONARY MARKERS
In this first experiment we investigated the ability of the user to be
‘accurate’ in a pointing task. This precision is statistically evaluated
while the user points for a limited amount of time a marker fixed in
the space.
4.1 Procedure
The user is presented with a virtual marker in the 3D workspace.
He/she is asked to place the tip of the virtual pen as close as
possible to the centre of the marker. Once the user has reached the
centre of the marker with the pen tip in a stable manner, he/she is
asked to click on the pen button and keep the pen in the same
position for 5 seconds. The pointing task is repeated for 3 points in
different positions in space:
4.2 Results
Recording a position for 5 seconds on our system corresponds to
approximately 310 sample points. Hence we applied a statistical
analysis to the recorded data to evaluate mean, variance and
deviation from the target point. In order to determine any possible
anisotropy in the error values, the position vectors are projected onto
three orthogonal reference directions:

From Figure 3 it is possible to notice that:
Table 1 - Statistic error values (mm) for the performed test
| Total deviance | Horiz.Range (95%) | Vert.range (95%) | Depth range (95%) | |
| Max Error | 17,31 | 7,28 | 9,53 | 19,50 |
| Mean Error | 6,21 | 4,81 | 5,29 | 10,12 |
Table 2 - Average Ratios between error ranges along different directions
| Depth/Vertical | Depth/Horizontal | Horizontal/Vertical | |
| Max Error | 2.0 | 2.7 | 0.8 |
| Mean Error | 1.9 | 2.7 | 0.9 |
5. EXPERIMENT 2: SKETCHING LINES
The intention of this test is to evaluate the user’s ability to sketch as
closely as possible a reference geometry visualised in the 3D
environment.
5.1 Procedure
The user must follow, as accurately as possible, a virtual geometry
displayed in the 3D workspace. By moving the pen with its button
pressed a 3D free hand sketch is traced. As soon as the button is
released a new geometry is shown and the tracing task must be
repeated for the following: horizontal line, vertical line, depth line
(line drawn ‘out of’ the screen), and rectangular frame aligned with
the screen plane. The user is required to perform the experiment
five times with different modalities as follows:
5.2 Results
The deviation of the sketched line from its reference geometry
represents how sketching precision and accuracy vary according to
the sketching direction. We considered for the error metric the
deviance, which is the distance between the pen tip and its closest
point on the reference. The range of the deviance error is
evaluated in each reference direction: horizontal range, vertical
range and depth range (Figure 4, Table 3).
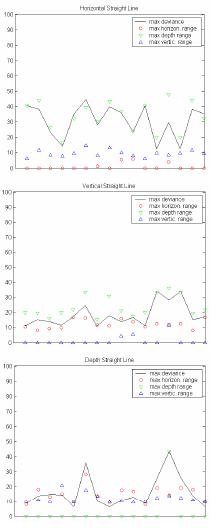
The following considerations can be made accordingly to the
obtained results:
5.2.1 Anisotropic error
The higher error along the depth direction, already noticed in the
experiment 1 is confirmed: the error along the depth direction, is
about 1,8-2,6 times the error along horizontal and vertical
directions (Table 4).
Table 3 - Table 3: Error values (mm) for Mode A
| Total deviance | Horiz.range | Vert.range | Depth range | |
| Max Value | 40,8 | 22,6 | 17,8 | 41,9 |
| Mean Value | 21,8 | 13,7 | 10,8 | 28,6 |
Table 4 - Average Ratios between error ranges along different directions for Mode A
| Depth/Vertical | Depth/Horizontal | Horizontal/Vertical | |
| Max Error | 2.3 | 1.8 | 1.3 |
| Mean Error | 2.6/td> | 2.1 | 1.3 |
5.2.2 Direction influence
Each user is more comfortable in sketching the same line in his
favourite direction. If the user sketches the line inverting the starting
and ending points, this yields definitively worse errors along all the
three reference directions. Inverting the direction, in our tests,
increases the error magnitude by an average factor of 1,9 (see
Table 5).
Table 5 - Error ratios for normal sketching (Mode A) over reversed direction (Mode B).
| Total deviance | Horiz.range | Vert.range | Depth range | |
| Reversed/Normal | 1.9 | 1.2 | 1.3 | 2.1 |
A noticeable result is that the inversion influences more the error
along the depth direction as this error nearly doubles along the other
reference directions. This is an additional confirmation that the user
loses
5.2.3 Speed influence
Our results show that the sketching speed influences the error not in
a predictable way. We tested the usual sketching patterns at low,
normal and high speed (Mode C,D,E).
For most users the error magnitude increases both at high speed and
at low speed. An increase in the error can be expected at high
speed, but not at low speed. This behaviour can be explained with
the fact that a moderate speed tends to stabilize vibrations in human
hand.
6. EXPERIMENT 3: PICKING CROSS HAIR MARKERS
The intention of this test is to evaluate the ability of the user in
performing the picking of a 3D three dimensional cross hair target
fixed in a random position. We analyse both precision and time
performance.
6.1 Procedure
A semi transparent [26] cross hair appears in a random position of
the workspace together with a highlight parallelepiped representing
the target bounding-box as shown in Figure 2. The user picks the
centre of the target using the pen button. We repeat the picking
operation for ten different points, and the user must return in a
‘home’ position before picking the next target. Different sounds
accompany each different step guiding the user during the test. We
record: picking position, the time to pick and the time to enter into
the target’s bounding-box are recorded in a text file during every
test session.
6.2 Results
The time interval to move from the ‘home’ position to the target
bounding-box is related to the reaction time and suggests the
maximum velocity of user’s movements, whilst the time to click the
centre of the marker shows how fast the user can perform accurate
movements. An analysis of these parameters yielded the following
results:
6.2.1 Deviance:
The error values are shown in the following Table 6. In a similar
manner to the above-mentioned experiments 1 and 2, the error along
the depth direction is considerably higher then the error along the
other directions.
Table 6 - Statistic error values for the performed test
| Deviance(mm) | Horiz.error(mm) | Vert.error(mm) | Depth error | Depth error/Horiz.error | Depth error/Vert.error | |
| Max Value | 24,04 | 12,90 | 16,23 | 32,25 | 2,5 | 2,0 |
| Avg.Value | 7,26 | 1,69 | 2,32 | 2,97 | 1.8 | 1.3 |
6.2.2 Time considerations:
The time interval necessary to perform the picking operation can be
split into two contributions:
Time to pick = Time to reach the bounding box + Time spent inside the bounding box
The corresponding average times have been evaluated using
statistical analysis and are shown in the following Table 7.
Table 7 - Time values (milliseconds) for the performed test
| Min | Max | Average | |
| Time to reach target Bounding-Box | 1207 | 2448 | 640 |
| Time inside target Bounding-Box | 1914 | 3271 | 750 |
| Time to Pick (total) | 3121 | 5016 | 1703 |
Our tests have shown, as expected, that the time needed to reach the bounding box of the target is proportional to the distance of the target from the “home position”. This is in accordance with the previously mentioned Fitts’ Law. Moreover the error magnitude decreases with the time spent inside the bounding-box more than with the total time to pick. This can be explained by the fact that the user moves quickly to the bounding box and then, once inside, points precisely the target.
7. DISCUSSION
The high tracking precision available nowadays with optical systems
allowed us to evaluate the human interaction process in VR.
All the performed tests show that that user looses precision easier
along a defined direction. We can identify this direction with the
direction perpendicular to the projection screen, that we call depth
direction. The first experiment, regarding the static pointing, has
firstly validated the anisotropy hypothesis, and has shown an
average error of 10.1 mm along the depth direction and an
average error of 4.8 mm and 5.3 mm along the vertical and
horizontal direction.
The error evaluated is considerably higher than the precision of the
system evaluated in Section 3.2.3, therefore we can assume our
results valid as regards the systematic error.
The second experiment, concerning the line sketching, has
confirmed the results of the previous experiment. The error
reasonably increases (28.6 mm, 13.7 mm and 18.8 mm for d, h, v
directions), effect explainable by the fact that the hand of the user is
now moving, but the ratio between the error along the depth
direction and the vertical and horizontal direction does not
change considerably.
The third experiment is the most significant in our opinion, because
regards the most performed task in a VR environment: the picking
or selection. Also this experiment validated the error anisotropy
hypothesis confirming the error ratio between the different
directions.
8. APPLICATION OF RESULTS: SMARTSNAP
The SpaceXperiment application has as main goal of first testing
and then improving interfaces to increase the performances of.
VRAD.
The measured pointing precision and accuracy allow the
optimization and calibration of smart drawing aids such as ‘snaps’
and ‘grips’ which are essential to assist the user during modeling
sessions in a 3D CAD environment, because of the lack of a
physical plane support (like the mouse pad) in direct input tasks.
SpaceDesign already implemented ‘snaps’ which were the natural
extension of any 2D CAD ‘snap’. The original shape was a cube
where the ‘snap’ semi-edge dimension was empirically defined in
35 mm.
After this set of experiments we implemented a new tool with the
idea that the overall dimensions of this aid should be proportional to
the average and maximum pointing error. Since our tests revealed
that, in 95% of the cases, the pointing error is below 24mm, we
introduced in SpaceDesign a ‘calibrated spherical snap’ (Fig. 7)
with Radius = k x 24(mm); where k>1 is a ‘comfort’ multiplying
factor. A reasonable value which seems to work well with our
system is k=1,2. This new design has brought a significant volume
reduction from 343000 mm3 to 100061 mm3, i.e. the volume of the
‘calibrated spherical snap’ is 29% of the original ‘cube snap’
volume. Obviously, this volume decrease translates in a better
resolution of the snap system, which can be very useful in the case
of very complex models, with a high density of possible snapping
points.

The next step was the design of an aid that could take into
consideration the high pointing anisotropy encountered in all our
experiments. The results showed that, although VR has the
advantage of the 3D perception, the user is not capable of judging
the added depth dimension as well as the other two dimensions.
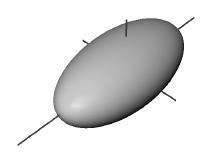
Therefore, we introduced a modified ‘calibrated ellipsoid snap’
with the major axis aligned along the depth direction (Fig. 8). In this
case, we define the three lengths of the semi-axis as follow:
RadiusDepth = k x 24(mm)
RadiusVertical = 0.5 x RadiusDepth = k x 12(mm)
RadiusHorizontal = 0.4 x RadiusDepth = k x 10(mm)
With these dimensions, the volume of this snap (volume of the
ellipsoid) drops down to 20846 mm3, i.e. the 21% of the ‘calibrated
spherical snap’ volume and the 6% of the original ‘cube snap’
volume.
We finally performed a new set of tests to verify the effectiveness
of the new snap design. We just repeated the ‘picking cross hair
markers’ experiment checking the time needed to pick a marker
with the snap activated. Results showed, as expected, that the time
needed to reach the target is proportional to the distance of the
target from the “home position”. However, the main result is that
no significant time difference is noticeable switching among the
three snaps , while the snap volume changes considerably, as
illustrated above.
Therefore, we validate the introduction of the ‘calibrated ellipsoid
snap’, called SmartSnap in SpaceDesign.
9. CONCLUSIONS AND FUTURE WORK
High tracking precision and cheap VR reality setups are getting
more and more widespread in industry and academia. In this paper
we have developed the SpaceXperiment interaction test bed in order
to improve the interaction techniques within our VR CAD system,
SpaceDesign. The results achieved can be directly extended to
other similar applications, and their context is clearly general. We
introduced the ‘calibrated ellipsoid snap’ to take into
consideration the high pointing anisotropy while keeping an high
resolution in the snap system.
At the moment, we are testing new smart snap design where the
axes of the ellipsoid and its dimensions dynamically vary according
to the position of the user head and hands. In the future we also
intend to use some of the results carried out with the experiments
described in this paper, including also the maximum and average
speed values registered during Experiment 3 (see Table 8), to
calibrate further aids and tools for sketching, e.g. filters to discard
scattered tracking errors, line segmentation algorithms and user
intention interpretation.
Table 8 - Average speed values (mm/s) during the test for the three test: slow, medium, fast.
| Average values Mode C(slow) | Average values Mode D(medium) | Average values Mode E(fast) | |
| Max speed for each user | 212,7 | 423,0 | 695,8 |
| Avg.speed for each user | 66,8 | 153,4 | 379,5 |
Acknowledgement
This work has been made possible thanks to the funding of the ‘Centro di Eccellenza di Meccanica Computazionale CEMEC (Bari – Italy).
10. REFERENCES
- ART, Advanced Realtime Tracking GmbH, ARTtrack1 & DTrack IR Optical Tracking System, www.ar-tracking.de.
- Boritz, James and Booth, Kellogg S., “A Study of Interactive 3D Point Location in a Computer Simulated Virtual Environment”, In Proceedings of ACM Symposium on Virtual Reality Software and Technology '97, Lausanne, Switzerland, Sept. 15-17, pp. 181-187.
- Bowman D., Johnson D., Hodges L. F., “Testbed evaluation of immersive virtual environments”, in Presence: Teleoperators and Virtual Environments Vol.10, No.1, 2001, pp. 75-95.
- Dani T.H., Wang L., Gadh. R. “Free-Form Surface Design in a Virtual Enviroment”, proceedings of ASME '99 Design Engineering Technical Conferences, 1999, Las Vegas, Nevada.
- Desiger J., Blach R, Wesche G., Breining R.: “Towards Immersive Modelling-Challenges and recommendations :A Workshop Analysing the Needs of Designers”, Eurographics 2000.
- Fiorentino M., De Amicis R., Stork A., Monno G.; “Spacedesign: conceptual styling and design review in augmented reality”, In Proc. of ISMAR 2002 IEEE and ACM International Symposium on Mixed and Augmented Reality, Darmstadt, Germany, 2002, pp. 86-94.
- Fitts P. M., “The information capacity of the human motor system in controlling the amplitude of movement.” Journal of Experimental Psychology, Vol. 47, No.6, 1954, pp. 381-391.
- Graham E. D., MacKenzie C. L., “Physical versus virtual pointing”, Proceedings of the SIGCHI conference on Human factors in computing systems: common ground, Vancouver, British Columbia, Canada, 1996, pp. 292-299.
- Hinckley ,Pausch, Goble, Kassell, “A Survey of Design Issues in Spatial Input" in proc. of ACM UIST'94 Symposium on User Interface Software & Technology, 1994, pp. 213-222.
- http://www.3dconnexion.com/products.htm
- Hummels C., Paalder A., Overbeeke C., Stappers P.J., Smets G., “Two-Handed Gesture-Based Car Styling in a Virtual Environment”, proceedings of the 28th International Symposium on Automotive Technology and Automation (ISATA '97), D. Roller, 1997, pp 227-234.
- J. Deisinger, R. Blach, G. Wesche, R. Breining, and A. Simon, “Towards Immersive Modeling - Challenges and Recommendations: A Workshop Analyzing the Needs of Designers”, in Proceedings of the 6th Eurographics Workshop on Virtual Environments, Amsterdam. June 2000.
- MacKenzie, I. S. “Fitts' law as a research and design tool in human-computer interaction”. Human- Computer Interaction, 7,1992, 91-139.
- Mark R. Mine, Frederick P. Brooks, Carlo H. Sequin”, Moving objects in space: exploiting proprioception in virtualenvironment interaction”, Proceedings of the 24th annual conference on Computer graphics and interactive techniques, 1997. Dani T.H., Wang L., Gadh. R. “Free-Form Surface Design in a Virtual Enviroment”, proceedings of ASME '99 Design Engineering Technical Conferences, 1999, Las Vegas, Nevada.
- Meyer K., Applewhite H., Biocca F., “A Survey of Position Trackers, Presence: Teleoperators and Virtual Environments, Vol. 1, No. 2, 1992, pp. 173-200”.
- Paljic A., Jean-Marie Burkhardt, Sabine Coquillart, "A Study of Distance of Manipulation on the Responsive Workbench",IPT'2002 Symposium (Immersive Projection Technology), Orlando, US, 2002.
- Poupyrev I., Weghorst S., Billinghurst M., Ichikawa T., “A framework and testbed for studying manipulation techniques for immersive VR”, Proc. of the ACM symposium on Virtual reality software and technology , Lausanne, Switzerland, 1997, pp. 21-28.
- Purschke F., Schulze M., and Zimmermann P., Virtual Reality - "New Methods for Improving and Accelerating the Development Process in Vehicle Styling and Design", Computer Graphics International 1998, 22 - 26 June, 1998, Hannover, Germany.
- Sachs, E., Roberts, A., Stoops, D.: “3Draw: A Tool for Designing 3D Shapes”, IEEE Computer Graphics and Applications, 11, 1991, pp 18-26.
- Schmalstieg D., Fuhrmann A., Szalavari Z., Gervautz M., “Studierstube –An Environment for Collaboration in Augmented Reality”, in Proc. of CVE 96 Workshop, Nottingham, GB, 1996, pp. 19-20.
- Wang Y., C.L. MacKenzie, and V.A. Summers, “Object manipulation in virtual environments: human bias, consistency and individual differences”, in Proceedings of ACM CHI'97 Conference on Human Factors in Computing Systems, , pages 349--350, 1997.
- Wang Y., Christine L. MacKenzie: “Object Manipulation in Virtual Environments: Relative Size Matters”, in Proc. CHI 1999, 48-55
- Wesche G., Droske M., “Conceptual Free-Form Styling on the Responsive Workbench”, proceedings of VRST 2000, Seoul, Korea, 2000, pp 83-91.
- Wesche G., Marc Droske, “Conceptual free-form styling on the responsive workbench”, in Proc. VRST 2000, Seoul, Korea, 2000, 83-91.
- Yanqing Wang, Christine L. MacKenzie: “Object Manipulation in Virtual Environments: Relative Size Matters”, CHI 1999: 48-55
- Zhai S., William Buxton, Paul Milgram, “The “Silk Cursor”: investigating transparency for 3D target acquisition”, Proceedings of the SIGCHI conference on Human factors in computing systems: celebrating interdependence, 1994.
- Zhai, S., Milgram, P, “Anisotropic human performance in six degree-of-freedom tracking: An evaluation of threedimensional display and control interfaces”, IEEE Transactions on Systems, Man, and Cybernetics-Part A: Systems and Humans, Vol 27, No.4, 1997, pp. 518- 528.
- Zhai, S., Milgram, P., Rastogi, A., “Anisotropic Human Performance in Six Degree-of-Freedom Tracking: A Evaluation of 3D Display and Control Interfaces”, IEEE Transactions on Systems, Man and Cybernetics, Part A: Systems and Humans.Vol.27, No.4, pp 518-528, July 1997.