 - измеренная дальность от точки стояния сканера до объекта (см. рис. 4);
- измеренная дальность от точки стояния сканера до объекта (см. рис. 4);
Источник: Наземное лазерное сканирование, Новосибирск: СГГА, 2009 - 261 с.
Система для наземного лазерного сканирования состоит из НЛС и полевого персонального компьютера со специализированным программным обеспечением [1]. НЛС состоит из лазерного дальномера, адаптированного для работы с высокой частотой, и блока развертки лазерного луча (рис. 1).
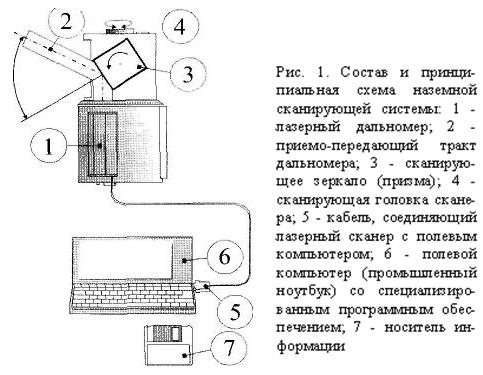
В основу работы лазерных дальномеров, используемых в НЛС, положены импульсный и фазовый безотражательные методы измерения расстояний, а также метод прямой угловой засечки.
В качестве блока развертки в НЛС выступают сервопривод и полигональное зеркало или призма. Сервопривод отклоняет луч на заданную величину в горизонтальной плоскости, при этом поворачивается вся верхняя часть сканера, которая называется головкой. Развертка в вертикальной плоскости осуществляется за счет вращения или качания зеркала.
В процессе сканирования фиксируются направление распространения лазерного луча и расстояние до точек объекта. Результатом работы НЛС является растровое изображение - скан, значения пикселей которого представляют собой элементы вектора со следующими компонентами: измеренным расстоянием, интенсивностью отраженного сигнала и RGВ-составляющей, характеризующей реальный цвет точки. Положение (строка и столбец) каждого элемента (пикселя) полученного растра отражает значения измеренных вертикального и горизонтального углов. Для большинства моделей НЛС характеристика реального цвета для каждой точки получается с помощью неметрической цифровой камеры.
Другой формой представления результатов наземного лазерного сканирования является массив точек лазерных отражений от объектов, находящихся в поле зрения сканера, с пятью характеристиками, а именно пространственными координатами (X, У, Z), интенсивностью и реальным цветом.
Пространственные координаты точек объекта в системе координат НЛС (рис. 2) вычисляются по формулам [1-3]:

где - измеренная дальность от точки стояния сканера до объекта (см. рис. 4);
 - горизонтальный угол измеренного направления лазерного луча
- горизонтальный угол измеренного направления лазерного луча  (см. рис. 4);
(см. рис. 4);
 - вертикальный угол направления , отсчитываемый от оси Z до вектора (зенитное расстояние направления лазерного луча) (см. рис. 4).
- вертикальный угол направления , отсчитываемый от оси Z до вектора (зенитное расстояние направления лазерного луча) (см. рис. 4).
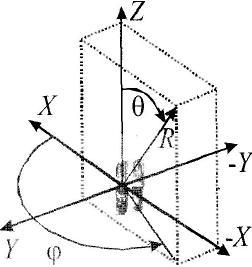
Рисунок 2 - Система координат НЛС
Формулы (1) являются обобщенными для перехода от полярной системы координат к пространственной декартовой. Для каждого конкретного сканера они имеют индивидуальный вид, где учитываются несовпадение источника излучения и приемника, эксцентриситет вертикальной и горизонтальной осей вращения прибора и другие величины, которые называются параметрами калибровки сканера [1-4].
В существующих моделях сканеров реализовано три метода измерения расстояний:
- импульсный;
- фазовый;
- триангуляционный.
Импульсный метод измерения расстояний основан на измерении времени прохождения сигнала от приемо-передающего устройства до объекта и обратно (рис. 3) [5, 6, 7]. Зная скорость распространения электромагнитных волн  можно определить расстояние как:
можно определить расстояние как:

где - время, измеряемое с момента подачи импульса на лазерный диод до момента приема отраженного сиг нала.
Фазовый метод измерения расстояний основан на определении разности фаз посылаемых и принимаемых модулированных сигналов (см. рис. 3). В этом случае расстояние вычисляется по формуле[5, 6, 7]:

где  - разность фаз между опорным и рабочим сигналом;
- разность фаз между опорным и рабочим сигналом;
 - частота модуляции.
- частота модуляции.
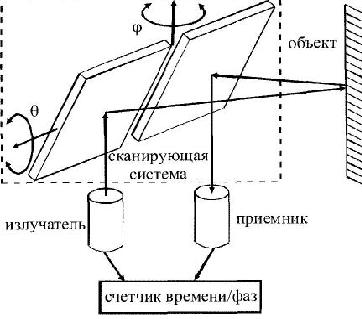
Рисунок 3 - Принцип импульсного/фазового методов измерения расстояний
В формуле (3) можно разложить на целую и дробную часть, тогда эта формула примет вид:

где  - длина волны
- длина волны  ;
;
 - целое число уложений длин полуволн
- целое число уложений длин полуволн  ;
;
 - дробная часть уложения длин полуволн в измеряемом расстоянии
- дробная часть уложения длин полуволн в измеряемом расстоянии  ;
;
Режим работы фазоизмерительного устройства зависит от его температуры, с изменением которой незначительно изменяется фаза сигнала. Вследствие этого точное начало отсчета фазы (место нуля) определить нельзя. С этой целью фазовые измерения повторяют на эталонном отрезке (калибровочной линии) внутри прибора. Место нуля можно определить как разность отсчетов при измерении внешнего (от дальномера до объекта и обратно) и внутреннего (калибровочной линии) световых путей и оно будет найдено тем точнее, чем меньше интервал времени между обоими измерениями [8].
Уравнение (4) называется основным уравнением фазовой дальнометрии.
Триангуляционный метод измерения расстояний наземными лазерными сканерами. В настоящее время существует два варианта реализации триангуляционного метода измерения расстояний.
Сущность первого варианта измерения расстояний триангуляционными сканерами заключается в следующем. С помощью проектора лазерный луч низкой мощности отклоняется от исходного направления [9]. Угол , образуемый базисом сканера d и лазерным лучом, вычисляется по положению изображения па верного пятна на приемнике первой ПЗС-камеры (рис. 4). Угол
, образуемый базисом сканера d и лазерным лучом, вычисляется по положению изображения па верного пятна на приемнике первой ПЗС-камеры (рис. 4). Угол образуется осью (базисом) сканера и вектором распространения отраженного сигнала от объекта, фиксируемого второй ПЗС-камерой. Термин «триангуляционный лазерный сканер» заимствован из англоязычной литературы и является несколько некорректным, поскольку принцип работы сканера основан на определении расстояний до объекта методом прямой угловой засечки с помощью величин
образуется осью (базисом) сканера и вектором распространения отраженного сигнала от объекта, фиксируемого второй ПЗС-камерой. Термин «триангуляционный лазерный сканер» заимствован из англоязычной литературы и является несколько некорректным, поскольку принцип работы сканера основан на определении расстояний до объекта методом прямой угловой засечки с помощью величин  и d . Но так как в отечественных публикациях нет никаких аналогов этому названию, то в тексте работы будет использоваться термин «триангуляционный лазерный сканер».
и d . Но так как в отечественных публикациях нет никаких аналогов этому названию, то в тексте работы будет использоваться термин «триангуляционный лазерный сканер».
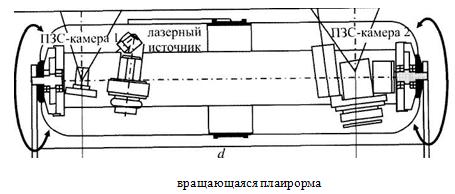
Рисунок 4 - принцип действия НЛС Mensi Soisic и S-series (вид сверху)
Сущность другого принципа действия триангуляционных лазерных сканеров показана на рис. 5
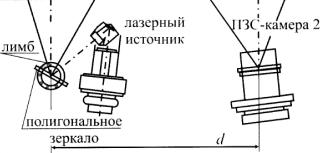
Рисунок 5 - Принцип действия НЛС Minolta (вид сбоку)
Как видно из рис. 5, в сканерах типа Minolta вместо ПЗС-камеры 1 используется полигональное зеркало, которое при помощи сервопривода отклоняет лазерный луч. В данном случае угол измеряется при помощи лимба, который регистрирует угол поворота полигонального зеркала относительно начального положения. Основные особенности при измерении расстояний данными триангуляционными сканерами: 1) развертка луча в горизонтальной плоскости происходит при помощи системы линз, расположенных вблизи лазерного источника, поэтому сканирование выполняется не лучом, а плоскостью; 2) отсутствует сервопривод, который выполняет поворот головки сканера.
Поскольку дальность действия производимых на сегодня триангуляционных лазерных сканеров составляет от десятков сантиметров до 25 м, ошибки в измеряемых углах, вызванные влиянием атмосферы (рефракцией и затуханием электромагнитных колебаний), практически не оказывают влияния на результаты измерений. Точность получения пространственных координат точек объекта триангуляционными сканерами составляет от 50 мкм до 0,3 мм и в основном зависит от величины измеряемого расстояния, инструментальных ошибок прибора, методических ошибок, связанных с точностью математических решений, положенных в основу управляющего программного продукта сканера, а также от материала, текстуры и формы сканируемого объекта.
При сканировании объектов триангуляционными сканерами производители рекомендуют использовать специальные порошки, которые делают поверхность объекта съемки однородноотражающей. Ошибки в углах, вызванные влиянием текстуры, формы и материала объектов сканирования, обусловлены тем, что возникает различное отражение отдельных частей падающего лазерного луча или плоскости. Это приводит к перераспределению энергии принимаемого пучка, из-за чего возникают его асимметрия и, в результате, неправильное определение центра пятна входного сигнала.