Источник: Сайт ООО «Севзапмостпроект» - http://www.szmp.ru/statya-1.html
Устойчивое функционирование и научно технический прогресс дорожной отросли как составляющей единого транспортного комплекса России [1] являются одним из важнейших предпосылок роста экономики. В структуре автодорог мосты занимают ведущее положение, будучи не только наиболее сложными, ответственными сооружениями, но и узлами транспортной сети, во многом определяющими эффективность функционирования транспорта в целом [2]. Для повышения эффективности процесса эксплуатации мостов на сети автомобильных дорог России необходимо получение полной, точной и оперативной информации о состоянии элементов сооружения и их фактическом пространственном расположении. Получение этих данных является залогом применения оптимальных технико–экономических решений, по результатам обследования мостов, что сокращает сроки и стоимость комплекса проектно – строительных работ при проведении ремонта или переустройства сооружений. Традиционно эти работы выполнялись с использованием классического геодезического оборудования. Даже с появлением безотражательного метода измерения расстояний, реализованного лазерных рулетках, электронных тахеометрах, эти работы оставались в значительной мере трудоёмкими, так как требовали огромное количество измерений. Однако использование для этих целей лазерных (лидарных) сканирующих систем наземного базирования позволят в значительной степени решить эту задачу. Принципом работы наземной лазерной сканирующей системы является использование лазерного дальномера и двухосевого прецизионного механического электропривода, смонтированных в одном корпусе.
В процессе съемки каждый одиночный лазерный импульс исходит из излучателя, отражается от объекта и возвращается на приемник лазерного излучения. Зная скорость распространения лазерного излучения, а также время, прошедшее от момента испускания импульса до момента его принятия на приемник автоматически определяется расстояние до объекта. В процессе работы прибор автоматически сканирует выбранную область, сканирующий луч перемещается в горизонтальной плоскости в результате вращения подвижной верхней части считывающей системы относительно нижней, в каждом акте сканирования регистрируя наклонную дальность до точки отражения и значения угла, определяющего направление зондирующего луча в системе координат сканера, и фиксируется в памяти компьютера.
В апреле 2007г. компанией ООО «ЗD Геокосмос» совместно с ООО «Севзапмостпроект» были проведены работы по обследованию моста через реку Тиксна на автодороге «Подъезд к КС Новоюбилейная» в Вологодской области. Мост представляет собой однопролётное сооружение полной длинной 32,47 м. из металлических газовых труб диаметром 1200 и 1416 мм. в количестве 4 штуки, собранные в одноярусный пакет [3]. Наряду с выполнением традиционных задач (обмерные работы, фиксация дефектов, оценка грузоподъемности), были произведены работы по наземному лазерному сканированию сооружения. В процессе создания съемочного обоснования были закреплены четыре пункта Т1,Т2,Т3,Т4, и проложен полигонометрический ход. Съемка проводилась в условной системе координат. Координаты пункта Т1 были приняты за исходные, координаты пункта Т2 были определены с пункта Т1. Полигонометрический ход рис. 1. замкнут с пункта Т3 на исходный пункт Т1 (невязка незамыкания хода составила Х = +0.004м, У=+0.003м, h=+0.004м.) Относительная невязка 1/50000 при допустимой 1/10000.
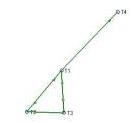
Рисунок 1. Схема полигонометрического хода.
В поле зрения наземного лазерного сканера на каждой его станции попадало как минимум 5 закрепленных и закоординированых отражающих марок (рефлекторов). Координаты отражающих марок определялись методами безотражательной тахеометрии, полярным способом с пунктов съемочного обоснования. Трансформация результатов лазерного сканирования из системы координат сканера в условную систему координат, осуществлялась в соответствии с «Методикой производства работ по лазерному сканированию». Максимальная погрешность при трансформации сканов составила 4 мм. Минимальное количество марок, по которым осуществлялась трансформация – 5. Дополнительный контроль точности обеспечивался путем объединения трансформированных станций (каждой станции соответствует свой уникальный цвет) в единую схему (Рис 2).
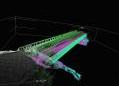
Рисунок 2. Схема «посадки» сканов
Раскрашивание облака точек в реальные цвета производилось в автоматическом режиме, в результате чего каждой точке облака точек лазерных отражений был присвоен истинный цвет (данные об истинном цвете берутся с фотоснимков, полученных с жестко закрепленной цифровой фотокамеры). Создание трехмерной модели производилось по данным наземного лазерного сканирования. Все элементы модели, за исключением поверхностей земли и воды, являются solid`ами. Точность отображения 2-3 см. Поверхности земли и воды отображены в виде триангуляционной сетки 3d face mesh. Моделирование производилось в среде AutoCad 2006 посредством облака точек реальных цветов, что позволило с минимальными затратами дешифрировать полотно дороги [5]. Полученную модель можно использовать для измерения расстояний, в т. ч. диагональных, определения координат любой точки элемента, создания профилей и трехмерного плана масштаба 1:200; 1:500.
В заключении следует отметить, что технология лазерного сканирования в наибольшей степени соответствует современным требованиям по производству работ (дистанционность, точность, скорость, детальность) на объектах транспортной сети для решения задач исполнительной съемки, и предпроектного обследования и реконструкции [4]. Наряду с традиционными методами проведения обследовательских работ (экспертные оценки, исследования прочностных характеристик материалов и пр.), созданные по данным наземного лазерного сканирования трехмерные модели имеют широкую область применения для решения задач мониторинга и переустройства мостовых сооружений.