
Китман Мехди
Перевод с английского:Kitmane.M
Описание системы частотного управления (СЧУ) приводом.
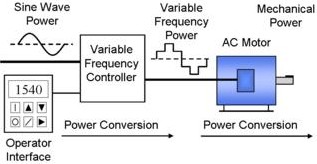
Рисунок 1 – СЧУ
СЧУ обычно состоит из двигателя переменного тока, контроллера и интерфейса оператора. [1][2]
Двигатель СЧУ
В СЧУ используется, как правило, трехфазный асинхронный электродвигателя .Иногда могут использоваться однофазные двигатели, но 3-фазные, как правило, предпочтительнее. В некоторых ситуациях различные типы синхронных двигателей имеет свои преимущества, но асинхронных двигателей подходят для большинства целей и, как правило, являются более экономичным выбором. Часто используются двигатели разработанные для работы на фиксированной скорости. Определенные усовершенствования в конструкции стандартных двигателей дают более высокую надежность и производительность СЧУ, например серия двигателей MG-31.[3]
Контроллер СЧУ
Контроллеры СЧУ - твердотельные электронные устройств преобразования энергии. Обычной сначала происходит преобразование входной энергии переменного тока в постоянный промежуточного источника питания, используя выпрямителя или преобразующий мост. Выпрямитель, как правило, 3-фазный двухполупериодный диодный мост. Энергия промежуточного звена DC затем преобразуется в синусоидальную энергию переменного тока при помощи автономного инвертора напряжения (АИН). Инвертор, вероятно, самая важная часть СЧУ, преобразует энергии DC в энергию AC, которая используется двигателем переменного тока. Эти устройства обеспечивают повышенную мощность, меньше гармонических искажений и малую чувствительность к входящих колебаниям фаз чем старые преобразователи. Поскольку входящая энергия преобразуется в постоянный ток, многие устройства будут как однофазные, так и 3-фазные (выступающей в качестве фазы преобразователя , а также скорости вращения), однако номинальные значения должны быть снижены при использовании одной фазы, так как часть мостовой выпрямитель осуществляет подключенной нагрузки.[4]
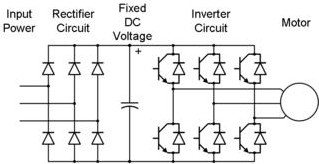
Рисунок 2 - Схема АИН
По мере появления новых типов полупроводниковых ключей, появились инверторы, на основе соответствующих устройств, на различные уровни напряжений и токов, для которых соответствующие устройства имеются. Введенный в 1980-х годов, биполярный транзистор с изолированным затвором (IGBT) стал устройством, используемым в большинстве схем преобразователей СЧУ первого десятилетия двадцать первого века.[5] [6] [7]
Характеристики АД будут корректироваться при изменении частоты, чтобы обеспечить номинальный крутящий момент. Например, если двигатель предназначен для работы на 460 вольт при частоте 60 Гц, напряжение должно быть снижено до 230 вольт, когда частота снижается до 30 Гц. Таким образом, соотношение напряжения и частоты должны регулироваться с постоянным соотношением (460/60 = 7,67 В / Гц в данном случае). Для оптимальной производительности, некоторые дополнительные регулировки напряжения могут быть необходимы, особенно на низких скоростях, но постоянное соотношение является общим правилом. Это соотношение может быть изменено для того, чтобы изменить крутящий момент двигателя.[8]
В дополнение к этому соотношение U/f контролируют более передовые методы управления, такие как векторное управление и прямое управление моментом (DTC - Direct Torque Control). Эти методы регулируют напряжения двигателя таким образом, что магнитный поток и момент двигателя можно точно контролировать.
Обычно для достижения переменного напряжения двигателя используется широтно-импульсная модуляции (ШИМ).Формирование напряжения с помощью ШИМ заключается в том, что клячи инвертора используются для построения синусоидального выходного сигнала серией коротких импульсов напряжения с различной продолжительности импульса.[9][5]
Эксплуатация двигателей выше номинальной скорости возможно, но ограничено условиями, которые не требуют больше энергии, чем на шильдике двигателя. Это называют "ослабления поля" для двигателей переменного тока, работающих по закону U/f выше номинальной скорости. Синхронные двигатели с постоянными магнитами имеют весьма ограниченную область ослабление за счет постоянства потокосцепления. Естественно, механической прочностью ротора и срок службы подшипников также ограничивает максимальную скорость двигателя. Рекомендуется проконсультироваться с производителем двигателя, если необходимо работать на скорости более 150% от номинальной.
Встроенный микропроцессор регулирует общую работу контроллера СЧУ. Основная программа микропроцессора находится в прошивке, которая недоступна для пользователей СЧУ. Тем не менее, в какой-то степени предоставляется программирование конфигурации и параметрирование, так что пользователь может настроить контроллер СЧУ с учетом параметров конкретного двигателем и требований к оборудованию.[5]
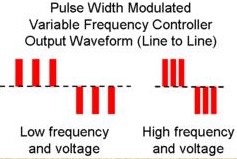
Рисунок 3 - Формы выходного напряжения АИН
Литература
- name=Jaeschke pp210-211
- NEMA Standards Publication (2001). Application Guide for AC Adjustable Speed Drive Systems. Rosslyn, VA USA: National Electrical Manufacturers Association. p. Retrieved 2008-03-27.
- name=NEMA-Guide| pages=pp. 9-12
- name=Campbell pages= pp79-83
- Bartos, Frank J. (2004-09-01). "AC Drives Stay Vital for the 21st Century". Control Engineering (Reed Business Information). Retrieved 2008-03-28.
- Eisenbrown, Robert E. (2008-05-18). "AC Drives, Historical and Future Perspective of Innovation and Growth". Keynote Presentation for the 25th Anniversary of The Wisconsin Electric Machines and Power Electronics Consortium (WEMPEC). University of Wisconsin, Madison, WI, USA: WEMPEC. pp. 6–10. Retrieved 2008-03-28
- Jahn, Thomas M.; Owen, Edward L. (January 2001). "AC Adjustable-Speed Drives at the Millennium: How Did We Get Here?". IEEE Transactions on Power Electronics (IEEE) 16 (1): 17–25. doi:10.1109/63.903985.
- Bose, Bimal K. (1980). Adjustable Speed AC Drive Systems. New York: IEEE Press. p. 3. ISBN 0-87942-146-0.
- name=Campbell pp82–85