


Kolesnikov Roman
Departement ElectrotechniqueChaire Commande electrique et automatisation des installations industrielles
Specialite "Commande electrique et automatisation des installations industrielles"
Methodes d'amortissement des vibrations dans les systemes electromecaniques
Le directeur de la these de magistere: Tolochko OlgaResume
ActualiteButs et objectifs
Les methodes passives d'amortissement
Systeme de controle modal deux masse de l'objet electromecaniques
Les methodes actives d'amortissement des vibrations
Piezoceramic actuators
Direction des fins de recherche
Bibliographie
Actualite
Une des principales caracteristiques de la plupart des arrangements, c'est que le dispositif d'entrainement et un organe executif n'est pas solidaire, et ayant des liens elastiques, qui a son tour est la principale cause des vibrations. Cela conduit a une deterioration du systeme, et a resonance augmente et peut conduire a un accident. Il est donc necessaire d'appliquer des mesures speciales pour amortir les vibrations.
Buts et objectifs
L'objectif de l'ouvrage - d'explorer les differentes methodes de amortir les vibrations dans les systemes electromecaniques. Pour atteindre cet objectif il est necessaire d'accomplir les taches suivantes:
- developper un modele mathematique avec des liaisons elastiques;
- etudier les proprietes dynamiques du systeme electromecanique a deux masses par la modelisation mathematique;
- etudier les methodes differentes de amortir les vibrations
- comparer les differentes methodes.
Les methodes passives d'amortissement
Systeme de controle modal deux masse de l'objet electromecaniques
Une des methodes de vibration amortissement passif est le controle modal, considere par l'exemple de l'objet electromecanique a deux masses.
Schema structurel de la CT (convertisseur a thyristors)-DEMO avec commande modale (CM) de la commande complete sont representes dans fig.1.
Coefficients d'evaluation des variables d'etat, en termes relatifs et en unites absolues sont relies entre eux par les relations

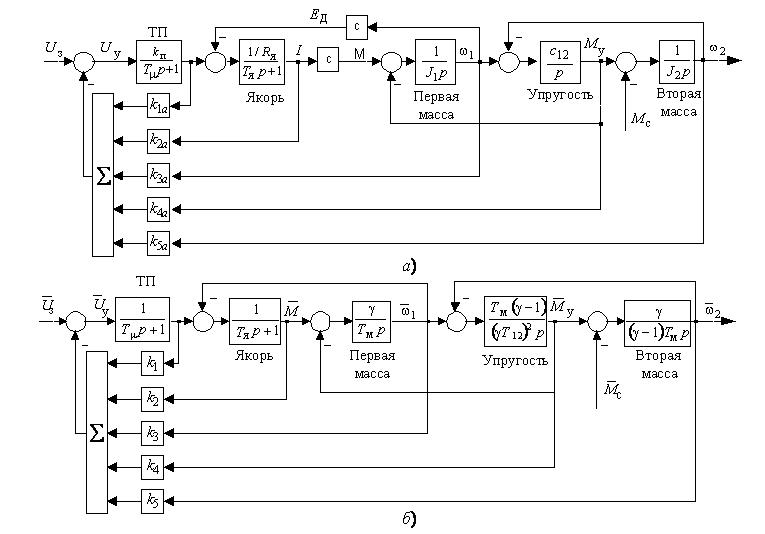
Figure 1 – Le shema structurel de systeme CT-DEMO ŕ) ŕ.u.; á) r.u.
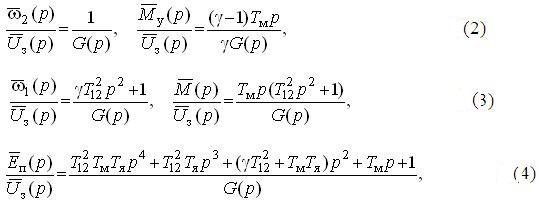
Transfert de fonction principale figure 1, b de l'action de controle sont donnes par:
ou
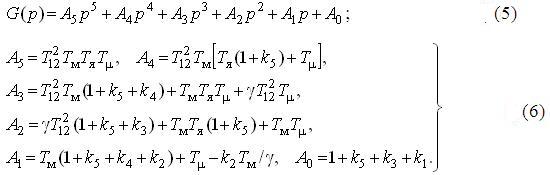
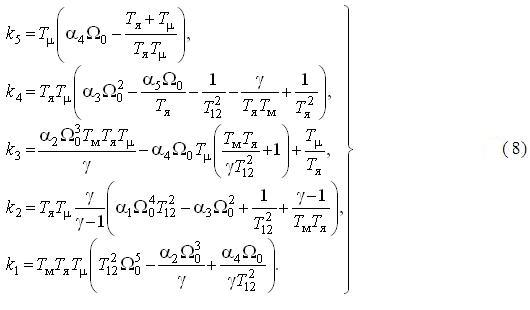
Coefficients equivalence entre eux shodstvennye desire

et reel (5) les polynomes caracteristiques (CP), nous obtenons des expressions pour le controleur modal :
A partir des fonctions de transfert (2) - (4) montre que, en l'absence de regler la vitesse des masses concentrees et le convertisseur EMF sont
– gain de systeme de commande modale (SCM) de l'action de controle.
Si le systeme d'entree de la fig. 1 mettre en place une intensite composer le (IC) avec une fonction de transfert (TF)
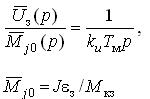
le comportement des moments electromagnetiques et elastique lors de l'elaboration de l'action de controle est determinee par les fonctions de transfert
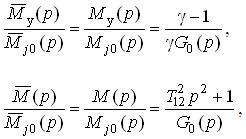
ou

que, apres le moment de l'evaluation par l'inverse de la moyenne geometrique de la racine  , aura la forme
, aura la forme
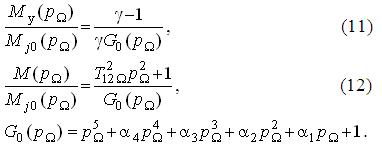
A partir des expressions (11), (12) montre que dans le processus de transition sur les mesures de controle du temps elastique varie proportionnellement a la fonction detransition souhaitee SŃM
et le couple electromagnetique est la somme des signaux proportionnels a la fonction desiree transition SŃM et son temps de derivee seconde:

La principale exigence pour le systeme de controle automatique (ACS) DEMOest d'eliminer les vibrations du moment elastique. Par consequent, le PC souhaitedoit repondre la fonction de transition avec un depassement de petites, voiresans. Parmi les formes connues standard pour la mesure de repondre a cesexigences: 1) Le polynome Newton, 2) polynomiale, construit par le rapportdouble, et 3) polynomiale, ce qui donne un "amortissement optimal" de la fonction de transition, et 4) le polynome de Bessel; 5) polynomiale, construit a partir d'unedonnee Depassement de 5 pour cent de la fonction de transition avecl'emplacement des poteaux sur un cercle de rayon  ; 6) propose par polynomeBurgin, qu'il appelle "le meilleur" pour le DEMS. Par consequent, cetteenumeration donne la parole a ces polynomes standards SP1, ..., SP6. Les coefficients de ces SP sont indiques dans le tableau 1.
; 6) propose par polynomeBurgin, qu'il appelle "le meilleur" pour le DEMS. Par consequent, cetteenumeration donne la parole a ces polynomes standards SP1, ..., SP6. Les coefficients de ces SP sont indiques dans le tableau 1.
Il est clair que la liste d'aptitude pour optimiser les polynomes de demonstration peut etre elargi, mais ce qui precede suffit de suivre les tendances de leur utilisation.
Fonctions de transition  (13) et derivees secondes des fonctions de transition
(13) et derivees secondes des fonctions de transition  les systemes choisis pour l'etude souhaitee PC sont presentes sur la fig. 2.
les systemes choisis pour l'etude souhaitee PC sont presentes sur la fig. 2.
Tableau 1 - Caracteristique coefficients polynomiaux SP1-SP6 et certains indicateurs des fonctions de transition correspondant

De l'analyse des fig. 2 et les formules (14) (15) montre que lors de l'acceleration de la SCM moment distincts dans le temps, a peu pres egale au temps necessaire pour atteindre la fonction de valeur maximale, vous pouvez rencontrer importantes poussees du couple electromagnetique, ce qui estconfirme par les fig. 3.
Les valeurs de ces plans a la lumiere de l'approximation ci-dessus peut etrecalculee par la formule

ou  – temps par rapport a atteindre la derivee seconde de la fonction de transitionsouhaitee de la valeur maximale
– temps par rapport a atteindre la derivee seconde de la fonction de transitionsouhaitee de la valeur maximale  .
.
Reglez la valeur maximale autorisee, du lancer, peut etre definie et le maximumadmissibles, a partir de l'etat de ses limites, polynome caracteristique, la frequence normalisee de vibrations elastiques DEMS:

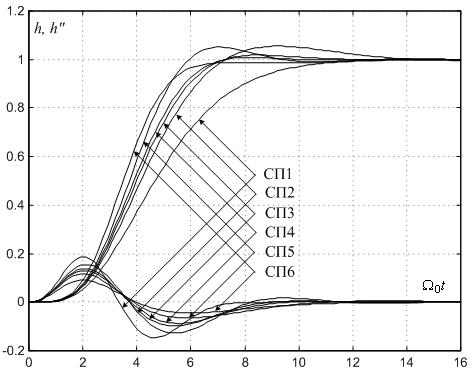
Figure 2 – Fonctions de transition correspondant a la norme Tableau PC. 1 et de leurs derivees secondes
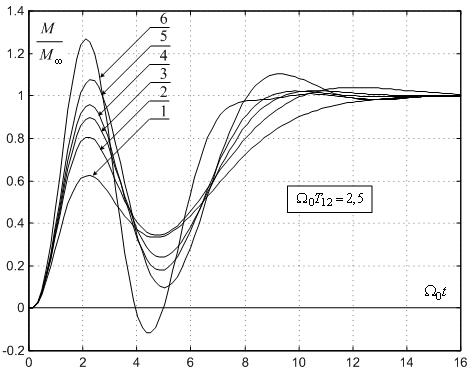
Figure 3 – Graphiques du couple electromagnetique overclocking sur PC
Les methodes actives d'amortissement des vibrations
Piezoceramic actuators
Un des moyens d'amortissement actif des vibrations dans les systemes electromecaniques est l'utilisation de piezoceramic actuators.
La premiere utilisation commerciale de l'effet piezoelectrique inverse s'est produit au cours de la Premiere Guerre mondiale, quand ils ont ete crees premiers appareils. En 1940, les scientifiques ont decouvert les proprietes piezoelectriques de titanate de baryum. Dans le debut des annees 70-s du 20 e siecle ont ete crees piezoceramic actuators la demande de reception commerciale.
Forces exterieures mecaniques agissant dans certaines directions sur le cristal piezo-electrique, ce qui provoque pas seulement des contraintes et deformations (comme dans tout solide), mais aussi la polarisation electrique, et donc l'apparition sur sa surface lies a des charges electriques de signes differents. Lorsque la direction des forces mecaniques sur la face devient le sens oppose du signe de polarisation et de charge. Ce phenomene est appele l'effet piezoelectrique direct. Il est utilise lors de la creation piezoceramic actuators visant a la suppression des vibrations mecaniques.
Effet piezoelectrique est reversible. Lorsqu'ils sont exposes a un piezo-electrique, comme le cristal, le champ electrique correspondant a la direction qu'il donne lieu a des sollicitations mecaniques. Lorsque la direction du champ electrique est inverse, respectivement, inverse le sens des contraintes et des souches. Ce phenomene est appele effet piezoelectrique inverse. Il est utilise pour creer des systemes de positionnement de haute precision, les lecteurs, dans lequel piezoceramic actuator sert de moteur, la realisation de nano-et micro avec un haut degre de precision.
Pour decrire la transformation des signaux electriques en piezoelectriques reponses mecaniques dans le debut des annees 80 du siecle dernier, le terme a ete introduit piezo - mecaniques.
Les actionneurs piezoelectriques convertir les signaux electriques (tension ou de charge) dans un mouvement ou force mecanique. Gamme de frequences de fonctionnement de l'akyuatorov piezo allant de l'etat statique a la moitie de la frequence de resonance du systeme mecanique. Il convient de noter qu'il existe une categorie distincte d'actionneurs qui fonctionnent precisement aux frequences de resonance, connu sous le nom transducteurs a ultrasons. Ils transforment l'energie electrique en energie mecanique.
Selon le materiau piezo-electrique peut etre piezoelectrique actionneurs (base sur des monocristaux) et piezoceramique (a base de poly - piezoceramiques). Dans la pratique, les actionneurs piezoelectriques ont trouve une application plus large.
Figure 11 – Shema structurel d'actionneurs piezoelectrique
Direction des fins de recherche
La prochaine etape dans les enquetes de travail de ce maitre sera d'etudier les moyens de l'efficacite de trempe et de vibrations elastiques dans les systemes electromecaniques avec des actionneurs piezoelectriques. En plus de la modelisation mathematique, il est prevu la mise en oeuvre d'etudes pilotes sur le materiel qui sera transfere au departement Universite de Versailles (Paris).
Bibliographie
- Ňîëî÷ęî Î. Č. Ŕíŕëčç č ńčíňĺç ýëĺęňđîěĺőŕíč÷ĺńęčő ńčńňĺě ń íŕáëţäŕňĺë˙ěč ńîńňî˙íč˙: Äčń. äîęň. ňĺőí. íŕóę: 05.09.03. – Äîíĺöę, 2004. – 457 ń.
- Ďŕíč÷ Ŕ.Ĺ. Ďüĺçîęĺđŕěč÷ĺńęčĺ ŕęňţŕňîđű. Ó÷ĺáíîĺ ďîńîáčĺ. Đîńňîâ-íŕ-Äîíó, 2008.
- Dierk Schroder. Elektrishe Antriebe – Regelung von Antriebssystemen. 2009 Springer – Verlag Berlin Heidelberg
- Áîđöîâ Ţ.Ŕ. Ńîęîëîâńęčé Ă. Ă. Ŕâňîěŕňčçčđîâŕííűé ýëĺęňđîďđčâîä ń óďđóăčěč ńâ˙ç˙ěč. Ńŕíęň-Ďĺňĺđáóđă,1992.
- Julien Ducarne. Modelisation et optimisation de dispositifs non-lineaires d’amortissement de structures par systemes piezoelectriques commutes. Conservatoire National des Arts et Metiers, le 27 Mars 2009.
- Ęŕçŕęîâ Â., Ęëčěŕřčí Â., Íčęčôîđîâ Â., Ńŕôđîíîâ Ŕ., ×ĺđíîâ Â. Ěíîăîńëîéíűĺ ďüĺçîýëĺęňđč÷ĺńęčĺ ŕęňţŕňîđű č îńîáĺííîńňč čő ďđčěĺíĺíč˙. Ęîěďîíĺíňű č ňĺőíîëîăčč ą6, 2007.
- Ęëčěŕřčí Â., Íčęčôîđîâ Â., Ńŕôđîíîâ Ŕ., Ďŕđôĺíîâ Á., ßđîřĺâč÷ Â. Ďüĺçîęĺđŕěč÷ĺńęčĺ ďŕęĺňíűĺ č ěîíîáëî÷íűĺ ŕęňţŕňîđű. Ęîěďîíĺíňű č ňĺőíîëîăčč ą6, 2002.
Curriculum vitae