Источник: http://elibrary.ru/item.asp?id=11837463 - научная статья, журнал "Вестник Воронежского государственного технического университета" №1, 2009 г.
Введение. Системы управления микроклиматом широко применяются на транспорте, в сельском хозяйстве, музеях и космических системах [1-4,8]. В настоящее время актуальна задача повышения качества функционирования систем управления климатическими параметрами воздушной среды, в которой находится один или несколько операторов, выполняющих ответственные действия в составе человеко–машинных систем. Примерами таких помещений являются производственные помещения, офисы, салоны транспортных средств, кабины пилотов самолётов, космических и подводных обитаемых аппаратов. Успешность и безопасность функционирования такого рода объектов в значительной степени зависят от самочувствия и работоспособности операторов. Рабочее пространство является мультизонным, причём желаемые значения параметров состояния воздушной среды в различных зонах могут быть различными. При этом каждый человек, используя средства системы управления, должен иметь возможность создать для себя благоприятные климатические условия в нескольких зонах рабочего пространства, сопряжённых с различными частями его тела.
Постановка задачи. Повышение качества функционирования систем управления климатическими параметрами воздушной среды связано с совершенствованием структуры и выбором рациональных средств регулирования таких систем. Необходимо сформировать рациональную структуру системы управления, обеспечивающую повышение быстродействия и точности такой системы. Решение этой задачи связано с исследованием свойств объекта управления и определением переменных, наиболее полно характеризующие комфортность рабочей среды (показатели комфорта). Сложность проблемы обусловлена спецификой объектов управления рассматриваемых систем, которые реализуют движения воздушных потоков и объединяют в своём составе тесно взаимодействующие друг с другом электрические, механические и пневматические компоненты. Как показал анализ их свойств [5], они являются нелинейными многокоординатными динамическими объектами, обладающими внутренними перекрёстными связями. Поэтому решение задачи построения высококачественных систем управления климатическим комфортом требует включения в её состав сенсорных и компьютерных элементов и применения принципов и методов, характерных для мехатроники. Таким образом, актуальными задачами являются построение системы управления, замкнутой по показателям комфорта и обладающей эффективным регулятором, построенным с учётом нелинейности и многосвязности объекта управления, а также проведение исследования динамических свойств системы с помощью компьютерного моделирования.
Показатели климатического комфорта в качестве регулируемых переменных системы управления состоянием воздушной среды. В качестве регулируемых переменных системы предложено использовать два типа безразмерных показателей климатического комфорта в регулируемых зонах рабочего пространства, разработанных на основе результатов исследований [5,6]. Здесь, переменные первого типа, представляют собой температурные показатели комфорта TCRl ,…,TCRL (от слов Thermal Comfort 1 L Rate), где L – количество регулируемых зон. Каждый человек имеет отношение к нескольким регулируемым зонам рабочего пространства и может установить для них желаемые значения температурного показателя комфорта, задав их в диапазоне от -5 до 5, что соответствует значениям температуры от +15 ° С до +37 °С. Взаимосвязь значений показателя комфорта TCRl в l –ой регулируемой зоне с ощущаемой человеком температурой τэкв.l воздушного потока в той же зоне характеризуется справедливой для всех l=1,...,L формулой приведенной в работе[7].
Переменные второго типа - показатели комфорта по скорости движения воздушного потока AFRl ,…,AFRL (от слов 1 L Air Flow Rate). Их значения могут задаваться в диапазоне от 0 до 3.
Показатель комфорта AFRl по скорости движения V воздушного потока в l-ой регулируемой зоне, устремленного к соответствующему участку тела человека, для всех l 1,...,L подчиняется зависимости предложенной в работе [7].
Скорость Vl вычисляется по формуле:
где gвых.l - массовый расход воздуха в l-ой регулируемой зоне, ρ - плотность воздуха, A- площадь l-ой регулируемой зоны.
Таким образом, регулируемыми переменными системы являются (L*1)– векторы показателей


Структура системы управления состоянием мультизонной воздушной среды. С учётом требований, сложившихся на основании опыта создания систем стабилизации параметров воздушной среды, необходимо синтезировать устойчивую систему, имеющую погрешность регулирования показателей комфорта в установившемся режиме не более 5% от максимального входного воздействия и время переходного процесса не более 30 с при ступенчатом изменении желаемых значений показателей комфорта. Для повышения точности и быстродействия системы с целью соблюдения указанных требований предлагается формировать систему как многоканальную следящую систему (рис. 1), замыкая её по показателям комфорта TCRl ,…,TCRL и AFRl ,…,AFRL .
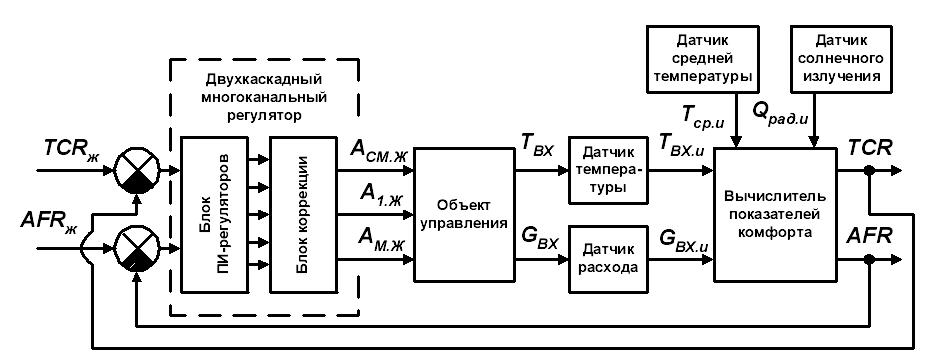
Рис. 1. Структура системы управления состоянием мультизонной воздушной среды
Фактически речь идёт о создании комплекса следящих систем, в каналах рассогласований которых находится многоканальный регулятор. Задающими воздействиями являются компоненты двух (L*1)-векторов представляющие собой желаемые значения регулируемых переменных системы.


Непосредственное измерение переменных TCR и AFR невозможно Поэтому они формируются на основании обработки показаний датчиков введённым в состав системы вычислителем показателей комфорта. С помощью датчиков температуры и скорости воздушных потоков в выходных каналах воздуховодов формируются (1*L )-векторы, компоненты которых представляют собой измеренные компоненты векторов ТВХ и GВХ, соответственно.
По этим данным вычисляется вектор GВЫХ и вектор ТВЫХ . Датчики средней температуры в помещении Тср и интенсивности проникающего в помещение солнечного излучения Qрад формируют величины Тср.и и Qрад.и , которые используются для вычисления τl и τэкв.l для всех l = 1,...,L.
Полученные таким образом данные позволяют рассчитать текущие значения выходных переменных системы.
В структуру модели объекта управления вошли подсистемы распределения воздушных потоков в комплексе воздуховодов, распределения воздуха и температур в регулируемых зонах рабочего пространства и блок физиотермических реакций людей [9], находящихся в рабочем пространстве.
Главное преимущество сформиро- ванной таким образом системы стабилизации состоит в том, что благодаря введению блока коррекции в установившемся режиме обеспечивается «развязка» каналов управления и снижение влияния нелинейностей [5]. Кроме того, это стабилизирует значения коэффициентов передачи всех каналов скорректированной системы, которые становятся близкими к единице. Предлагаемый подход позволяет существенно упростить структуру первого каскада регулятора и методику настройки его параметров. Поскольку коэффициенты передачи всех каналов системы близки к единице, значения параметров ПИ- регуляторов легко могут быть выбраны из условия обеспечения одинаковых динамических свойств всех каналов системы управления. Это важно для обеспечения согласованности управления по различным каналам, и в этом состоит ещё одно преимущество предлагаемого подхода к созданию системы, использующей управление на основе инверсной модели объекта управления представленной блоком коррекции на рис.1. Для улучшения характеристик системы при наличии нескорректированных динамических свойств объекта, возможных неточностей формирования инверсной модели и возмущающих воздействий применяется комплекс ПИ-регуляторов.
Результаты математического моделирования. Исследование динамических свойств системы стабилизации параметров состояния воздушной среды выполнено с помощью ЭВМ. Для этого разработана программа компьютерного моделирования системы управления состоянием мультизонной воздушной среды в салоне автомобиля, функционирующая в среде МАТЛАБ/Симулинк. Моделируемая система имеет 4 смесительных камеры и 18 зон регулирования, имеющих отношение к водителю и 3 пассажирам. Погрешности регулирования показателей комфорта для всех 18 зон в установившемся режиме не превышают 11 процентов от желаемого значения. Однако, длительности переходных процессов в разных каналах сильно различаются и превышают 30 с. Анализ полученных результатов моделирования показал, что взаимовлияние каналов в системе, скорректированной с помощью внутреннего каскада регулятора на основе статической инверсной модели незначительно. Благодаря действию блока коррекции реакции, обусловленные перекрёстными связями, не превышают 1% от приложенного ступенчатого воздействия. Это свидетельствует об эффективной фактической развязке каналов системы управления, которые можно считать практически автономными.
Результаты математического моделирования замкнутой системы, содержащей многоканальный двухкаскадный регулятор с настроенными ПИ-регуляторами (рис.2) при тех же задающих воздействиях свидетельствуют о том, что такая система обладает более высокой точностью и скоростью отработки желаемых значений показателей комфорта, чем разомкнутая подсистема, содержащая только блок коррекции. Таким образом, результаты исследований свидетельствуют о том, что применение двухкаскадного регулятора способствует сокращению времени переходного процесса в разных каналах системы от 7.5 до 24 раз. В результате этого длительности переходных процессов лежат в диапазоне от 6 до 10 с, и не превышают требуемого значения, равного 30 с.
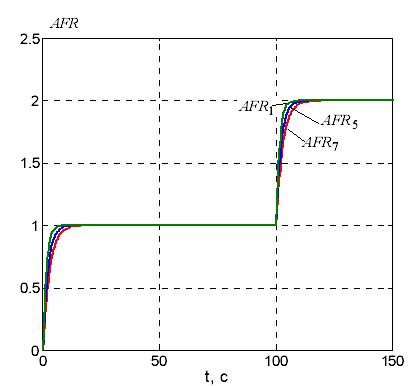
Рис.2. Процессы регулирования показателей комфорта AFR в замкнутой системе с двухкаскадным регулятором
Благодаря действию интегральных составляющих ПИ-регуляторов погрешности воспроизведения показателей комфорта в установившемся режиме при отсутствии возмущающего воздействия оказались практически равными нулю. При воздействии солнечной радиации они не превышают 0,5%, что также свидетельствует о высокой эффективности предлагаемой системы управления.
Выводы. Предложенное решение обеспечивает значительное повышение точности и быстродействия мехатронной системы управления микроклиматом мультизонного рабочего пространства. Результаты исследования подтвердили высокую эффективность разработанной структуры системы с многоканальным двухкаскадным регулятором, содержащим блок коррекции на основе полученной статической инверсной модели объекта управления и комплекса пропорционально- интегральных регуляторов. Благодаря достигаемой статической «развязке» каналов управления обеспечивается высокая степень согласованности процессов регулирования показателей комфорта и простота настройки параметров ПИ-регуляторов. При этом производится комплексный учет таких возможных возмущающих воздействий на систему, как солнечная радиация и температура окружающей среды.
Литература
1. Семенов В.Г., Алейникова Е.А. Компьютерное моделирование при исследовании системы управления микроклиматом теплицы. «Современные наукоемкие технологии», № 10, 2007г.
2. Ерков А.А., Хорошавцев А.И. Системы управления микроклиматом. Режим доступа http://icmtec.com/main1_11.htm
3. M.Джиако. Сравнительный анализ двух методик оценки климатического комфорта на примере систем климатизации морского круизного лайнера. Режим доступа: http://www.abok.ru/for_spec/articles.php?nid=2803
4. Мекленбург M., Тумоза C., Прайд A. Требования к параметрам микроклимата исторических музейных зданий, Журнал AВОК, Микроклимат в помещениях, №7/2004
5. Afanasieva O.V., Ilyukhin, Y.V. Possible measures of comfort rate improvement for mechatronical climate control system in the car. Проблемы управления и моделирования в сложных системах. Труды 7 международной конференции РАН, Самара, 2005. с. 221-228
6. Stolwijk J.A. Mathematical model of physiological temperature regulation in man, NASA Contractor Report, NASA CR-1855, 1971.
7. Nishi Y., Gagge A.P. Direct evaluation of convective heat transfer coefficient by naphtalene sublimation, J. Appl. Physiol., Vol.29, S. 830-838, 1970.
8. Strobel A. Konzept fur eine Klimakomfortregelung eines Personenkraftwagens, Universitat Stuttgart, Doktorarbeit, 2005
9. Афанасьева О.В. Компьютерное исследование и формирование модели физиотермических реакций человека как компонента системы управления состоянием воздушной среды. Материалы XI Научной Конференции МГТУ «Станкин» и «Учебно-Научного Центра Математического Моделирования МГТУ «Станкин»- ИММ РАН» по Математическому Моделированию и Информатике. Программа. Сборник докладов. Москва. 23-25 Апреля 2008. С.147.