Софть стартер с пульс регулировка напряжений и контроль квазичастоты асинхронного двигателя.
1. Введение в проблему:
Некоторые недостатки тиристорные устройства плавного пуска, таких как двигатель напряжение питания искажения, задержки смещения угла первых гармонических составляющих тока, увеличение потерь энергии в переходных асинхронного двигателя может быть уменьшен путем применения импульсных регуляторов напряжения (PVR) работает на полностью контролируемых выключатели питания (Например, IGBT) с определенными переключения алгоритмов и высоких частотах переключения. В случае PVR регулирования напряжения асинхронного двигателя осуществляется путем изменения ширины импульсов напряжения, которые вырезаются из каждого полупериода напряжение сигнала на определенной частоте переключения. Как электромеханические свойства асинхронных двигателей в основном определяется первым напряжения гармонических, это имеет смысл для контроля выходного напряжения импульсного устройства плавного пуска в первой гармоники величины. Согласно результатам исследования введены в [3] рекомендуется применять экспоненциально первого гармонического изменения напряжения для получения оптимального потерь энергии, а также нижней PVR выходного напряжения и тока содержание гармоник. Для более детального сравнения тиристорные и транзисторные устройства плавного пуска см. [3]. Цепь питания PVR один этап и его выходное напряжение кривой R и L-нагрузки представлены на рис.1. Такая схема состоит из двух пар обратной параллельно соединенных транзисторов T1-T4 с байпасом диодов D1-D4 и позволяет статора регулирования напряжения путем изменения ширины импульса в какой-то определенной частоты коммутации IGBT. Первая пара IGBT-транзисторов (Т1 и Т2) обеспечивает энергию потока в обоих направлениях (с нагрузкой и к электросети), а вторая пара (Т3 и Т4) шунтов RL-нагрузки, когда как T1 и T2 в выключенном состояние.
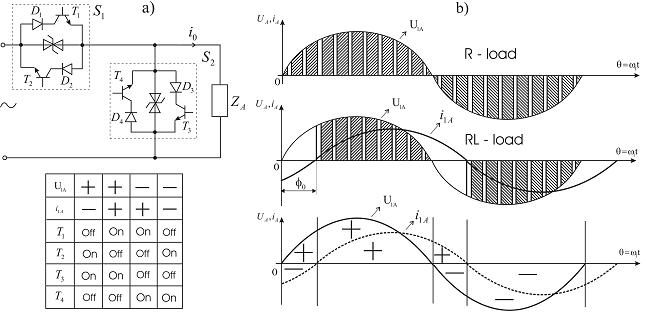
Рис. 1. Одна фаза ИНП силовой цепи (а) с переключатели операционном столе, PVR кривой выходного напряжения для R-нагрузки и RL-нагрузкой (б).
Благодаря такой операции последовательность IGBT-транзисторов непрерывного тока через цепь условии, что все время. IGBT транзисторы T1-T4 последовательность переключения в зависимости от текущего Ai1 и напряжения знак U1A представлена в таблице на рис. 1. Для более подробной информации по одной операции ИНП фазы см. [4]. Авторы этой работы провели сравнение трех типов силовых цепей: симметричные цепи питания с 6 пар выключатели, ИНП с 3 парами переключатели питания и диодный мост шунт, и, наконец, схема основана на 4 пары выключателей с одним IGBT без фазы. (Рис. 2).
2. Сравнение ИНП силовой цепи структура три типа схем ИНП мощности представлены на рис. 2.
Самым дорогим структуры цепи питания ИНП включает в себя 6 переключатели пар (12 IGBT транзисторов в общем, рис. 2а). Такая схема власти могут быть описаны с отсутствием асимметрии фазных токов и простота управления и переключения алгоритмов. Когда один из электросети транзисторы T1-T7 включен, есть обмен энергией происходит между нагрузкой и сетью. Хотя T1-T7 находятся в выключенном состоянии, шунтирующие транзисторов Т8-Т12 обойти нагрузки фаз так, что ток может непрерывно потока хотя цепи.
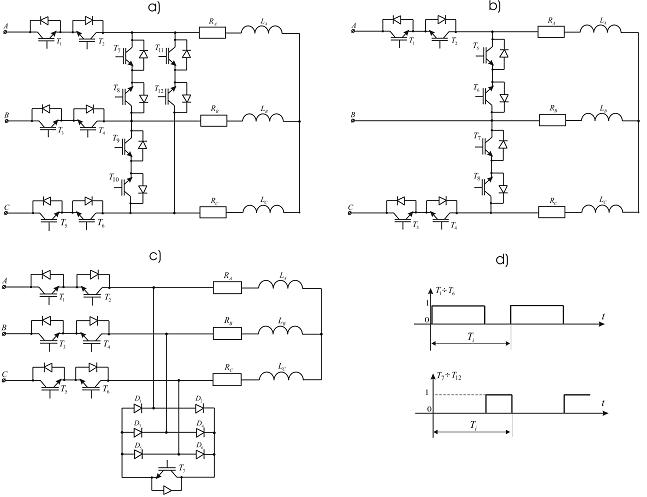
Рис. 2. ИНП цепи питания с 6-выключатели (а), 4 электрические выключатели (б) и 3 выключатели с шунта мост диода (с), сети и шунтирующих выключателей последовательность действий (D).
Второй тип ИНП силовой цепи (рис. 2) состоит из 3-переключатели (6 IGBT транзисторов Т1-Т6), диодный мост шунта D1-D6 с одним однонаправленной IGBT T7. диодный мост с транзистор Т7 используются для обхода RL-нагрузке фаз в то время как сети питания транзисторов Т1-Т6 выключены. Этот тип цепи питания PVR имеет гораздо меньше фазных токов асимметрии и состоит из модулей питания меньше, чем первая структура, следовательно, дешевле.
Наиболее экономически эффективный вид структуры власти ИНП является одной лишь 4 выключатели питания. (рис. 2, b) Он состоит из 4 электросети IGBT транзисторы T1-T4 и 4 шунта IGBT транзисторов Т5-Т8, а одна из фаз остается IGBT-бесплатно. отсутствие третьего выключатель питания в одной из фаз приводит к значительным асимметрии фазных токов и, следовательно, увеличились потери мощности в переходных асинхронного двигателя. В качестве одного из недостатков этого типа цепи питания ИНП можно также упомянуть неконтролируемого асинхронного двигателя время торможения (рис.4б - первая скорость кривая). Поэтому, чтобы обеспечить его быстрое остановки следует отключить IGBT без фазы с контактора во время торможения асинхронных двигателей (рис.4б - вторая скорость кривая).
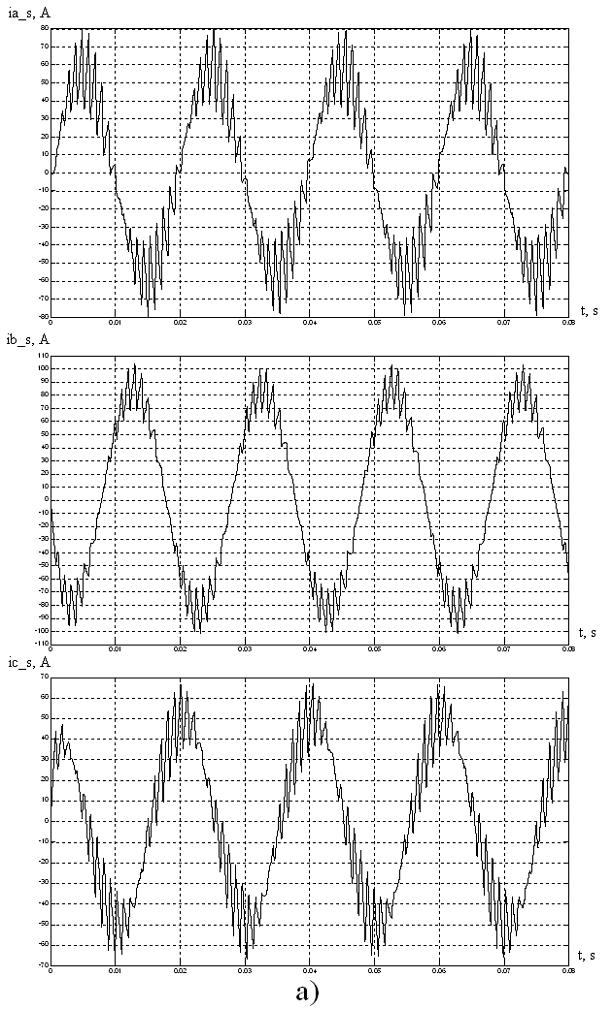
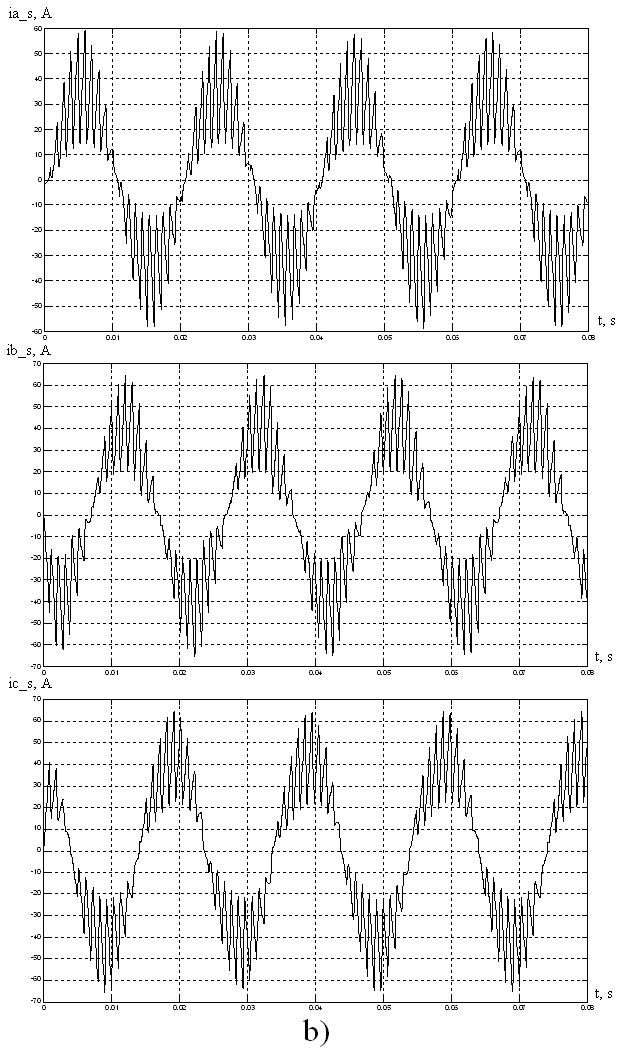
Рис. 3. ИНП выходных токов для цепи питания с 4-выключатели (а) и 6 выключателей (б).

Рис. 4. ИНП выходных напряжений и асинхронного двигателя кривые 4MTKF160LB8 скорости 4 переключателей (а, b) и 6 коммутаторов с (с,d ) и силовых цепей.
С увеличением фазных токов потерь энергии асимметрия, как правило, выше. Асимметрия одного фазного тока к другой может быть описано на основе процента. Авторы этой работы провели анализ степени асимметрии для трех типов схем ИНП мощность: 4 электрические переключатели цепи, 6 переключатели питания цепи и 3 переключатели питания схемы с шунта мост диода. Результаты фазы расчета асимметрии токов приведены в таблице 1.
Таблица 1. Фаза токов асимметрии и потери энергии сравнения для различных типов схем ИНП власти.
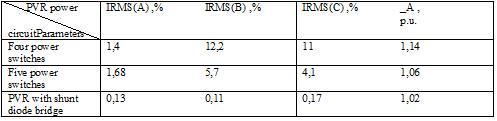
Для оценки степени асимметрии получены с помощью моделирования фазных токов значения RMS для каждого из трех PVR силовых структур цепи были по сравнению с фазой Действующее значение тока симметричной схеме питания PVR с 6 выключатели питания. Кроме того сравнение потерь энергии в 4MTKF160LB8 асинхронный двигатель (11 кВт, 380/220В, 40% рабочий цикл, инерция коэффициент К J = 1,6; Tload = Tnom, T 0 = 0,4 S) для переходных симметричные и асимметричные цепи питания PVR структур были выполнены. Видно, что асимметрия фазных токов особенно важно для 4 электрические выключатели схема PVR, что приводит к дополнительным потерям энергии в переходных асинхронного двигателя и в конечном итоге приводит к его больше запуск и торможение.
3. Квази-частоты для асинхронного двигателя Низкая скорость.
Квази-частотного управления асинхронным двигателем сочетает в себе какой-то мере преимущества параметров и частоты методы контроля [1, 2]. Квази-регулирование частоты могут быть использованы для операций асинхронного двигателя на низких скоростях, что важно для позиционирования механизмы. Например, он может быть использован для электроприводов механизмов передвижения крана.
Формирование напряжения ИНП выходной кривой (фазы) во время управления квази-частоты показана на рис. 5. В соответствии с рис. 5 транзисторов Т1, Т2 принять участие в формировании выходного напряжения ИНП. Питающей сети транзисторов Т1 и Т2 проходит ток для положительного и отрицательного квази-полуволн напряжения соответственно (временной интервал T1), а T7 работает только в качестве шунта (временной интервал t2), когда T1 или T2 находится в выключенном состоянии, чтобы замыкания может снизиться до нуля.
Формирование напряжения питания асинхронного двигателя состоит из серии положительных и отрицательных напряжения питающей сети полуволн, которые формируются в соответствии с знакопеременной функции переключения UA + и UA -. Знак этой функции переключения определяет квази полярности напряжения в то время как период Tquasi задает число положительных и отрицательных напряжения питающей сети полуволн в нем. Для получения симметричной трехфазной напряжения определенных снижению частоты переключения этих функций должны быть сдвинуты по фазе на 1200.
По сравнению с тиристорным регулятором напряжения формирования квази кривой напряжения в случае ИНП осуществляется с определенной последовательностью переключения сети и шунта транзисторов в зависимости от желаемого квази частоты. Для квази-мерное значение напряжения нужно менять сети транзистора и шунта ширины импульса транзистор. Для работы асинхронного двигателя при низкой скорости это необходимо для поддержания потока связи на постоянном уровне за счет уменьшения напряжения квази-регулирования частоты пропорционально снижению частоты. В противном случае, перенасыщенность асинхронного двигателя магнитной системы будет происходить.
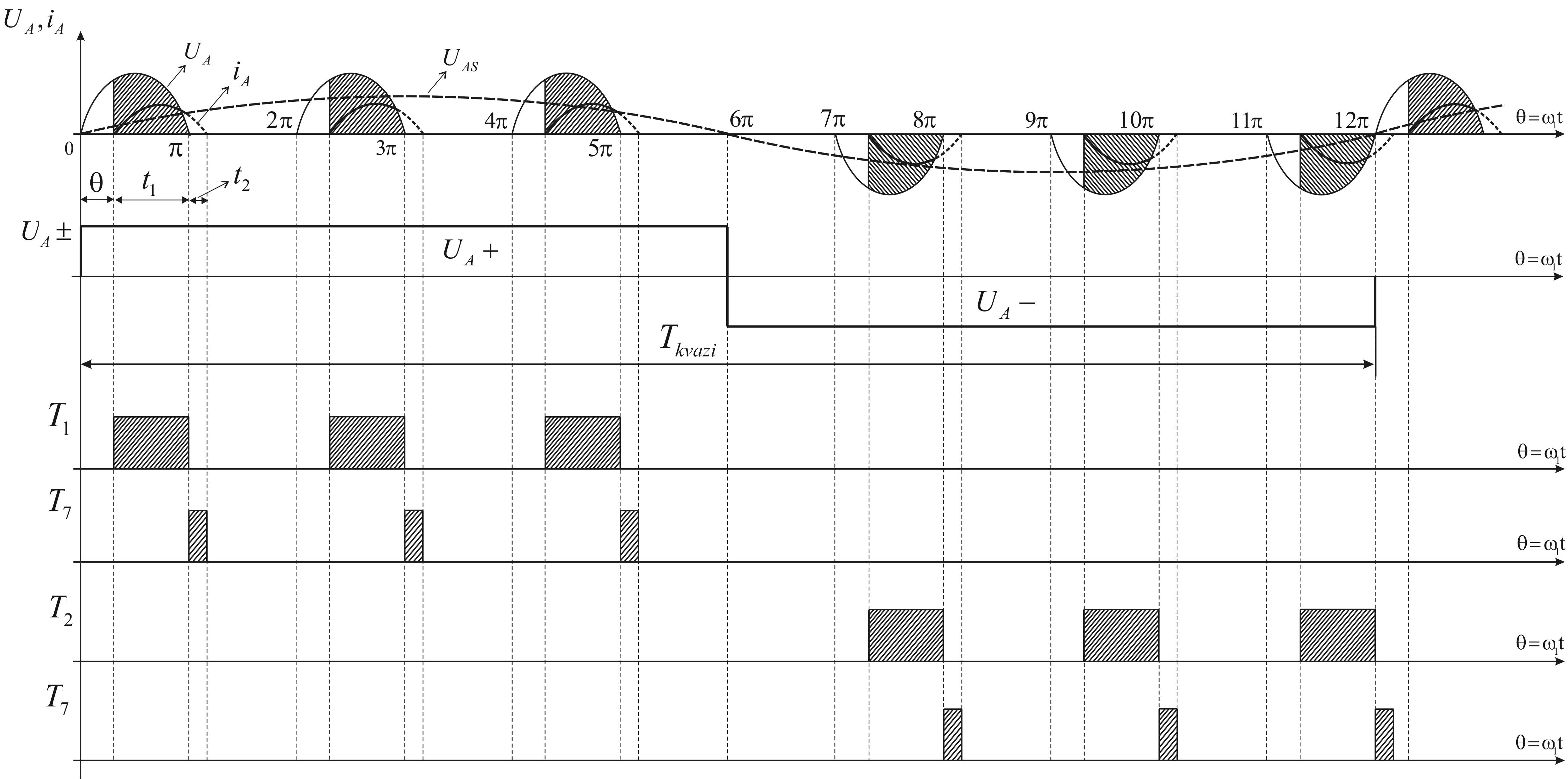
FРис. 5. ИНП выходного напряжения и тока формирование кривой в квази-частотного управления асинхронным двигателем (этап) на 8,33 Гц (= 0,12 Tquasi).
Авторы провели моделирование двигателя крана 4MTKF160LB8 индукции на низкой скорости (8,33 Гц квази-частоты, = 0,12 Tquasi ов) для схемы ИНП власти с 3 переключатели и диодный мост шунта (рис. 2). Результаты этого моделирования представлены на рис. 6 и рис. 7.
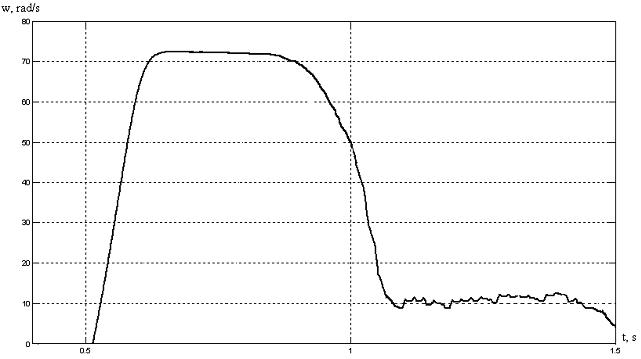
Рис. 6. 4MTKF160LB8 асинхронного двигателя скорость кривой с низким быстродействием в 8,33 Гц в течение контроль квази-частоты.
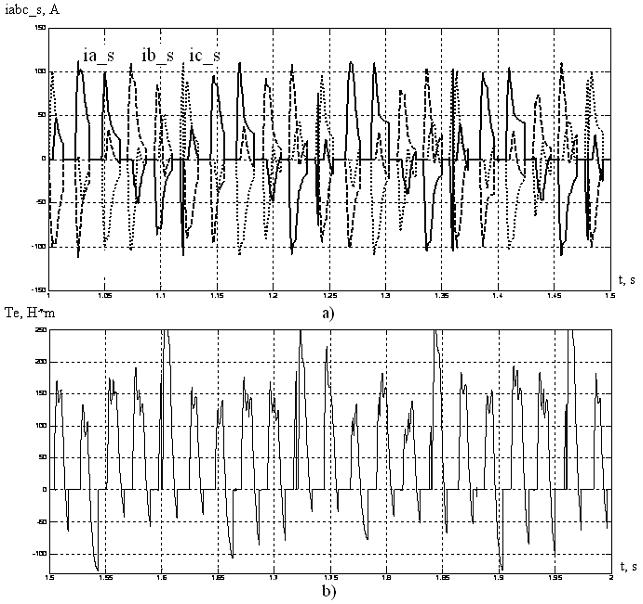
Рис. 7. Трехфазный ток статора (а) и крутящий момент (б) 4MTKF160LB8 асинхронного двигателя во время quasifrequency контроля на 8,33 Гц.
Несмотря на простоту технического представление квази-регулирования частоты приводит к колебаниям скорости двигателя из-за импульса характер тока статора и крутящий момент двигателя во время управления квази-частоты. ШИМ-контроля переключения на quasifrequency контроля приводит к быстрому уменьшению частоты, а напряжения величина остается на том же уровне. Это событие вызывает вибрацию асинхронного двигателя при переключении на низкой скорости. refore управления квази-частота должна быть применена к асинхронного двигателя низкая скорость работы для краткосрочного периода.
4. ВЫВОДЫ
Если нет скорости требования к определенным технологическим регулятором импульса напряжения механизм имеет очевидные преимущества по сравнению с регулятором напряжения фазы, такие как лучше гармоник содержания, отсутствие угла сдвига отставание в текущей формы волны, меньше потери энергии, большее число переключений частоты.
Результаты этого исследования показывают, что импульс напряжения с цепи питания на основе 3-выключатели питания и шунтирующих мост диода можно считать перспективным и разумным заменить тиристор плавного пуска. Это относительно недорогой (по сравнению с частотным преобразователем) и технологически простое устройство с функцией управления квази-частоты обеспечит не только снизить потери энергии в переходных процессов асинхронного двигателя из-за своей симметричной структуре цепи питания, а также снижены влияние на электросети, но и может быть использована для кратковременной работы асинхронных двигателей при низких скоростях. Такая функция может быть особенно полезно для позиционирования механизмов, например, мостовой кран тележки путешествия механизма.
Перечень ссылок
[1] АНДРЮЩЕНКО О., ЛИПАТОВ Г., ХЕРУНЦЕВ П. Исследование режимов асинхронного электропривода при квазичастотном управлении. Электротехническая промышленность. Сер. Электропривод, 1989, вып. 4 (102).
[2] ТИМОФЕЕВ В. Особенности реализации режима циклоконвертирования в системе ТК-АД. – В кн.: Усовершенствование и автоматизация промышленных электроприводов и электроустановок. – Иваново, ИвГУ, 1988, с. 65-70.
[3] FIRAGO B., VASILJEV D., PAWLACZYK L., Zastosowanie impulsowego regulatora napięcia dla miękkiego rozruchu i hamowania silników, Prace Naukowe Instytutu Maszyn, Napędów i Pomiarów Elektrycznych, nr 62, Studia i Materiały nr 28, s. 378-386, Politechnika Wrocławska, Wrocław, 2008.
[4] WINIARSKI B., TUNIA H.. Energoelektronika. Regulatory prądu przemiennego. Wydawnictwa Naukowo-Techniczne, Warszawa, 1994, s. 205 - 215.