Способы регулирования асинхронного двигателя:
Асинхронный двигатель является наиболее массовым электрическим двигателем. Эти двигатели выпускаются мощностью от 0,1 кВт до нескольких тысяч киловатт и находят применение во всех отраслях хозяйства. Основным достоинством асинхронного двигателя является простота его конструкции и невысокая стоимость. Однако по принципу своего действия асинхронный двигатель в обычной схеме включения не допускает регулирования скорости его вращения. Особое внимание следует обратить на то, что во избежание значительных потерь энергии, а, следовательно, для короткозамкнутых асинхронных двигателей во избежание перегрева его ротора, двигатель должен работать в длительном режиме с минимальными значениями скольжения.
Асинхронный двигатель является наиболее массовым электрическим двигателем. Эти двигатели выпускаются мощностью от 0,1 кВт до нескольких тысяч киловатт и находят применение во всех отраслях хозяйства. Основным достоинством асинхронного двигателя является простота его конструкции и невысокая стоимость. Однако по принципу своего действия асинхронный двигатель в обычной схеме включения не допускает регулирования скорости его вращения. Особое внимание следует обратить на то, что во избежание значительных потерь энергии, а, следовательно, для короткозамкнутых асинхронных двигателей во избежание перегрева его ротора, двигатель должен работать в длительном режиме с минимальными значениями скольжения.
Рассмотрим возможные способы регулирования скорости асинхронных двигателей (см. рис.1). Скорость двигателя определяется двумя параметрами: скоростью вращения электромагнитного поля статора ω0 и скольжением s:

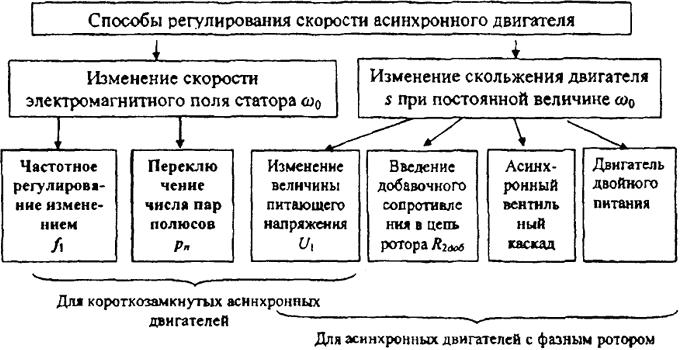
Рис.1. Классификация способов регулирования асинхронных двигателей Исходя из (1) принципиально возможны два способа регулирования скорости: регулирование скорости вращения поля статора и регулирование скольжения при постоянной величине ω0:
Скорость вращения поля статора определяется двумя параметрами (см.3.3): частотой напряжения, подводимого к обмоткам статора f1, и числом пар полюсов двигателя рп. В соответствии с этим возможны два способа регулирования скорости: изменение частоты питающего напряжения посредством преобразователей частоты, включаемых в цепь статора двигателя (частотное регулирование), и путем изменения числа пар полюсов двигателя. Регулирование скольжения двигателя при постоянной скорости вращения поля статора для короткозамкнутых асинхронных двигателей возможно путем изменения величины напряжения статора при постоянной частоте этого напряжения. Для асинхронных двигателей с фазным ротором, кроме того, возможны еще два способа: введение в цепь ротора добавочных сопротивлений (реостатное регулирование) и введение в цепь ротора добавочной регулируемой э.д.с. посредством преобразователей частоты, включаемых в цепь ротора (асинхронный вентильный каскад и двигатель двойного питания).
В настоящее время благодаря развитию силовой преобразовательной техники созданы и серийно выпускаются различные виды полупроводниковых преобразователей частоты, что определило опережающее развитие и широкое применение частотно-регулируемого асинхронного электропривода. Основными достоинствами этой системы регулируемого электропривода являются:
плавность регулирования и высокая жесткость механических характеристик, что позволяет регулировать скорость в широком диапазоне;
- экономичность регулирования, определяемая тем, что двигатель работает с малыми величинами абсолютного скольжения, и потери в двигателе не превышают номинальных;
Недостатками частотного регулирования являются сложность и высокая стоимость (особенно для приводов большой мощности) преобразователей частоты и сложность реализации в большинстве схем режима рекуперативного торможения.
Подробно принципы и схемы частотного регулирования скорости асинхронного двигателя рассмотрены ниже.
Изменение скорости переключением числа пар полюсов асинхронного двигателя позволяет получать несколько (от 2 до 4) значений рабочих скоростей, т.е. плавное регулирование скорости и формирование переходных процессов при этом способе невозможно.
Поэтому данный способ имеет определенные области применения, но не может рассматриваться, как основа для построения систем регулируемого электропривода.
2. Частотное регулирование асинхронных электроприводов:
Принципиальная возможность регулирования угловой скорости асинхронного двигателя изменением частоты питающего напряжения вытекает из формулы ω = 2π f1 (1 - s)/p. При регулировании частоты также возникает необходимость регулирования амплитуды напряжения источника, что следует из выражения U1 ≈ Е1 = kФf1. Если при неизменном напряжении изменять частоту, то поток будет изменяться обратно пропорционально частоте. Так, при уменьшении частоты поток возрастет, и это приведет к насыщению стали машины и как следствие к резкому увеличению тока и превышению температуры двигателя; при увеличении частоты поток будет уменьшаться и как следствие будет уменьшаться допустимый момент.
Для наилучшего использования асинхронного двигателя при регулировании угловой скорости изменением частоты необходимо регулировать напряжение одновременно в функции частоты и нагрузки, что реализуемо только в замкнутых системах электропривода. В разомкнутых системах напряжение регулируется лишь в функции частоты по некоторому закону, зависящему от вида нагрузки. Частотное регулирование угловой скорости электроприводов переменного тока с двигателями с короткозамкнутым ротором находит все большее применение в различных отраслях техники. Например, в установках текстильной промышленности, где с помощью одного преобразователя частоты, питающего группу асинхронных двигателей, находящихся в одинаковых условиях, плавно и одновременно регулируются их угловые скорости. Примером другой установки с частотно-регулируемыми асинхронными двигателями с короткозамкнутым ротором могут служить транспортные рольганги в металлургической промышленности, некоторые конвейеры и др.
Частотное регулирование угловой скорости асинхронных двигателей широко применяется в индивидуальных установках, когда требуется получение весьма высоких угловых скоростей (для привода электрошпинделей в металлорежущих станках с частотой вращения до 20 000 об/мин).
Экономические выгоды частотного регулирования особенно существенны для приводов, работающих в повторно-кратковременном режиме, где имеет место частое изменение направления вращения с интенсивным торможением.
Для осуществления частотного регулирования угловой скорости находят применение преобразователи, на выходе которых по требуемому соотношению или независимо меняется как частота, так и амплитуда напряжения. Преобразователи частоты можно разделить на электромашинные и вентильные. В свою очередь электромашинные преобразователи могут быть выполнены с промежуточным звеном постоянного тока и непосредственной связью. В последних используют коллекторную машину переменного тока, на вход которой подают переменное напряжение с постоянной частотой и амплитудой, а на выходе ее получают напряжение с регулируемой частотой и амплитудой. Электромашинные преобразователи с непосредственной связью практического применения не получили.