
Гапечкин Антон Игоревич
Факультет компьютерных наук и технологий
Кафедра компьютерной инженерии
Специальность: Компьютерные системы и сети
Тема выпускной работы:
Анализ поведения подвижного объекта в замкнутом пространстве
Научный руководитель: Мальчева Раиса Викторовна
Научный консультант: Кривошеев Сергей Васильевич
Реферат
Содержание
Актуальность темы
Научная значимость работы
Практическая ценность результатов работы
Динамическое позиционирование
Системы управления
Математическая модель
Оптимальная оценка состояния
Методы определения координат объекта
Заключение
Примечание
Список литературы
Введение
Современный технический прогресс в области информационных технологий существенно расширяет тактико-технические возможности подвижных
объектов различного назначения. Значительную роль в этом процессе играет решение задач ориентации и навигации объектов на новом качественном уровне. Системы,
решающие на борту эти задачи, объединяются в информационно-управляющие комплексы ориентации и навигации (КОН). Наряду с оптимизацией управляющей части
КОН, общим направлением их развития в последние десятилетия является существенное повышение точности и надежности признано информационные параметры
ориентации и навигации, т.е. совершенствование информационной части КОН. Эти обстоятельства во многом предопределяют рост эффективности и безопасности
эксплуатации подвижных объектов[1].
Необходимость создания КОН как комплексов, в которых результат в значительной степени достигается за счет обеспечения избыточности информации, оптимизации
ее обработки, оптимизации управляющей части, обусловлено тем, что только конструктивно-технические пути решения задач ориентации и навигации на современном
уровне требований, часто ведут к чрезвычайным расходам, а темпы их внедрения существенно ниже требуемых темпов наращивания информационного обеспечения. В
то же время, другим основополагающим фактом в развитии КОН является переход к ресурсосберегающим технологиям, что позволяет получить существенный выигрыш в
массогабаритных характеристиках аппаратуры, снизить ее стоимость, энергопотребление и повысить надежность. Тут один из основных путей
решения - миниатюризация датчиков, применительно к инерциальным системам наиболее ярко отражается в переходе там, где это целесообразно, к
микромеханическим инерциальным чувствительным элементам. Одновременно совершенствуются и технологии перспективных макродатчиков КОН, частности инерциальных
чувствительных элементов и гравиинерциальних измерителей.
В большинстве случаев информационным ядром современных и перспективных КОН является бес платформенная навигационная система, комплектируемая со спутниковой
навигационной системой. Такой подход наиболее полно проявляется, в частности, в КОН авиационного применения, опыт проектирования которых широко использован
в монографии.
Актуальность темы
Задача вычисление координат подвижного объекта актуальна, т.к. в настоящее время требуется высокая точность и достоверность положения объекта. В связи с этим ведутся исследования по улучшению систем навигации и вывод их на новый, более высокий уровень.
Научная значимость работы
Научная значимость данной работы заключается в разработке более точного метода определения координат подвижного объекта и удержание его в определенном пространстве.
Практическая ценность результатов работы
В ходе выполнения работы после проведения моделирования с улучшенными методами предполагается получить более оптимальный и достоверный
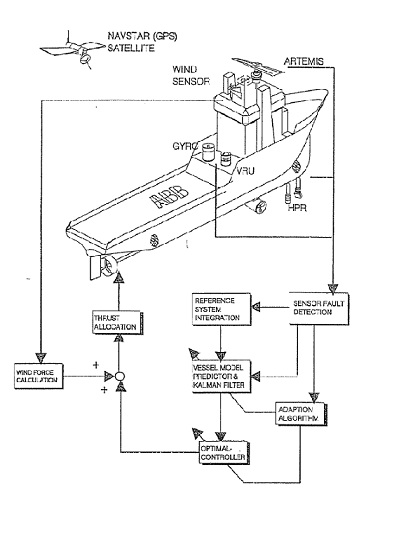
метод определения координат и удержание объекта в ограниченном пространстве. Обобщенная структура КОН в виде пяти взаимосвязанных функциональных
модулей (Рис.1):
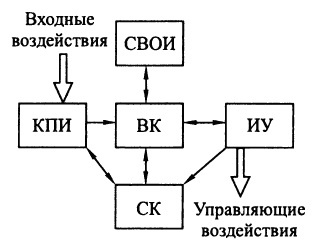
В приведенной структуре информационной основой КОН является комплекс систем-источников первичной информации (КПИ), измеряющие различные параметры движения и состояния объекта и передают эту информацию в аналоговом или цифровом виде в вычислительный комплекс (ВК). На Рис.1 обозначено: СВОИ - средства ввода и отображения информации. CK - средства контроля подсистем КОН и управляемого объекта. ИУ - исполнительные устройства управления.
Динамическое позиционирование
Системы динамического позиционирования открыли новые возможности для интенсивного развития морских исследований, результаты которых
составляют необходимую научную базу для всех видов использования и освоения Мирового океана.
В зависимости от глубины проведения работ в настоящее время применяют в основном два способа удержания судов в заданном положении: статические системы
позиционирования (якорные системы удержания) и системы динамического позиционирования.
Суда, обладающие высокой мобильностью, незаменимы при выполнении работ по разведке месторождений нефти и газа на значительных площадях морей, когда
требуется частая смена района работ. При глубинах свыше 200 м на судах, как правило, используются динамические системы позиционирования, обеспечивающие
достаточно быструю и простую постановку на заданную точку, возможность ухода с позиции при ухудшении гидрометеорологических условий и высокую точность
удержания судна на месте. Динамическое позиционирование может осуществляться автоматически, полуавтоматически или вручную при помощи команд оператора с
пульта управления системы динамического позиционирования. За рубежом ведущее положение по разработке систем динамического позиционирования занимают
Норвегия и Франция. Впервые такая система была создана французской фирмой и установлена в 1964 г. на исследовательском судне "Terebel". В США разработкой
систем динамического позиционирования занимается фирма «Honeywell». Система этой фирмы впервые была установлена на буровом судне "Glomar Challenger",
построенном в 1968 г. Опыт эксплуатации этих систем на судах «Terebel» и «Glomar Challenger» показал их высокую эффективность. Суда удерживались в
заданной точке при действии ветра и течения с точностью до 3-6 % от глубины[2,3].
«Эврика» был первым в мире с автоматическим управлением динамического позиционирования судна. Это был полупогружной, построен нефтяной компанией «Шелл»
для разведочного бурения и начал свою работу весной 1961 года. С одним двигателем мощность для каждого из своих 400 тонн перемещения, он был очень успешным
в принятии ядер до 150 м в морское дно. Усреднения по два места в сутки, она пробурена до девяти в один день на глубине с до 1200 г.
Так как это первая операция динамической системы позиционирования, они прошли долгий путь. Старые аналоговые (одного потока системы) затем пошли и
цифровые компьютеры представлены в двух, а потом и тройным резервированием. Частота отказов прошли путь от нескольких в месяц и более чем 20 процентов
простоя в первый год, на сегодняшний день среднее время наработки на отказ (MTBF) около трех лет для лучших систем.
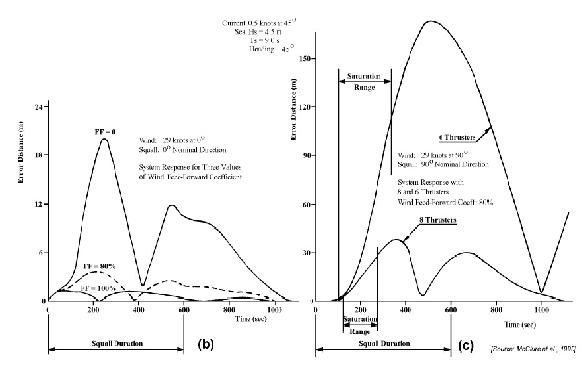
Развитие успеха системы динамического позиционирования требует средств для проверки производительностей всей системы от контроля для реакции судна
окружающей среды и двигателя сил на корпус. Полное моделирование даст производительность системы с помощью математического анализа, прежде чем любое
оборудование было приобретено. Тогда с помощью детального тренажера системы, можно изменять параметры управления системой, аппаратные характеристики,
дизайн винта или даже конструкции корпуса, чтобы получить те или необходимой эффективности в меняющихся условиях, а также в ответ на внезапный отказ от
компонент системы.
Системы управления
Системы динамического позиционирования, в основном, это положение судна по отношению к намеченной позиции и направляет силу различных
двигателей, чтобы исправить любые ошибки позиции. Без какой либо модуляции тяги и предоставление «мертвой зоны», система будет постоянно
перерегулироваться. Наверное, самая простая практическая система состоит из тяги и момента команды пропорциональной (Р) на сумму местоположения и
направления ошибки:

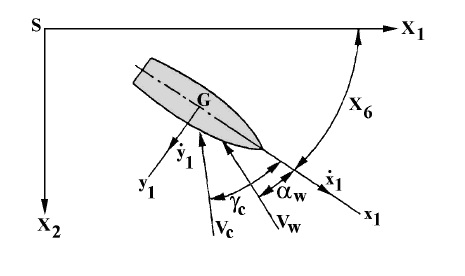
Диаграмма осей системы приведена на рис 4.1, с началом координат, S, из земных осей в системе входит по-прежнему поверхности воды.
Математическая модель
Для динамического позиционирования плавучее сооружение, не только горизонтальные движения низкой частоты волны (K = 1), влияние (K = 2)
и рыскания (К = 6) представляют интерес. Двигатель силы должнен балансировать и принимать волны, текущие и ветровые нагрузки. Кроме того, xЎ и Xf, является
медленно меняющимися структуры. Осталось высокочастотные движение волн, которые интегрировались или отфильтровались.
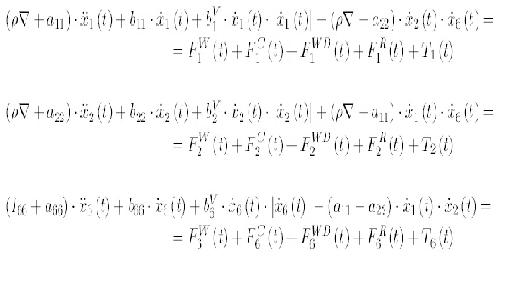
Общий вид трех нелинейных связанных (Эйлера) уравнения движения в горизонтальной плоскости на волнах, качаться и рыскания судна с динамическим
позиционированием - с осями системы определяется по формуле:
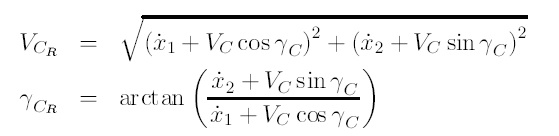
Относительная скорость воды и напрвления:
Оптимальная оценка состояния
Прежде чем разрабатывать систему управления динамического позиционирования необходимо вычислить оценку состояний шумов. Обычно это делается путем применения наполнителя оценкам состояния Кальман и обозначаются Xl, Xh, Xc1, Xw.
Методы определения координат объекта
Пcевдодальномерний метод.
Сущность псевдодальномерного метода состоит в определении расстояний между навигационными спутниками и потребителем и последующим расчетом координат
потребителя. Для расчета трех координат потребителя псевдодальномерным методом необходимо знать расстояния между потребителем и минимум тремя
навигационными спутниками. Эти расстояния измеряются между фазовыми центрами передающей антенны навигационного спутника и приемной антенны потребителя.
Измеренное расстояние между i-тым навигационным спутником и потребителем называется псевдодальностью к i-му спутнику. Псевдодальность, вообще говоря, также
является расчетной величиной и вычисляется как произведение скорости распространения электромагнитных колебаний и времени, в течении которого сигнал
спутника по трассе «спутник — потребитель» достигнет потребителя. Это время измеряется в аппаратуре. Измеренная псевдодальность к i-му навигационному
спутнику определяется по формуле:
Уравнение (1) можно записать через координаты i-го спутника и координаты потребителя по формуле:

Дифференциальный метод.
Дифференциальный метод определения координат используется для повышения точности навигационных определений, выполняемых в аппаратуре потребителя. В основе
дифференциального метода лежит знание координат опорной точки или системы опорных точек, по которым могут быть вычислены поправки к определению
псевдодальностей навигационных спутников. Если эти поправки учесть в аппаратуре потребителя, то точность расчета, в частности, координат может быть
повышена в десятки раз.
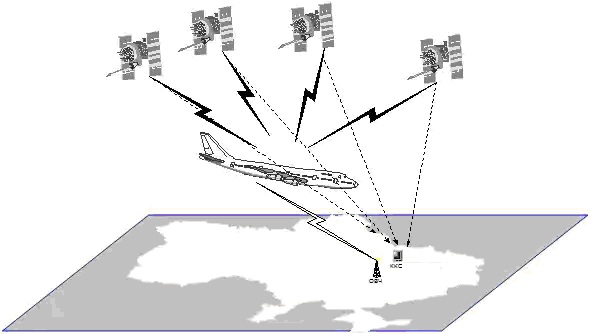
Аппаратура, входящая в состав наземного функционального дополнения состоит из контрольно-корректирующих станций , ОВЧ канала передачи данных в соответствии
с рисунком 5. Бортовой навигационный GNSS приемник и приемник ОВЧ сигналов установленные на борту подвижного объекта[4,5].
Разница между расчетной и измеренной псевдодальностями является поправка псевдодальности соответствующего навигационного спутника. Учет в аппаратуре потребителя этой разницы и позволяет повысить точность навигационных определений. В практических системах потребителю передается скорость изменения поправок псевдодальностей, с применением которых производится расчет скорректированных псевдодальностей.
Заключение
Выполненные исследования, результаты которых изложены работе, позволяют решить актуальную задачу формирования математической модели
судна, оборудованного СДП, на ранних стадиях исследовательского проектирования. К наиболее существенным можно отнести следующие результаты работе[6]:
1. Аналитические описания гидроаеродинамичних характеристик судна.
2. модель неизменной части системы управления динамическим позиционированием судна, что позволяет:
- Обеспечить проверку обоснованности принятия предварительных решений;
- Способствовать формированию необходимой базы данных для автоматизации проектирования и накоплению личного опыта проектировщика;
- Послужить основой для разработки математического обеспечения автоматизированной системы исследовательского проектирования СДП;
- Усовершенствовать процесс разработки СДП, снизить трудозатраты и время на проектирование;
- Повысить эффективность разрабатываемой модели.
3. Главный алгоритм управления динамическим позиционированием, определяющий основные вычислительные операции вычислительного устройства.
4. Функционально-принципиальную схему СДП, которая определяет необходимые функциональные элементы системы и характер взаимных связей между ними.
5. Требования к измерительной подсистемы СДП, в общем, и к измерителей, в частности, которые определяют состав и структуру функциональной схемы измерительной подсистемы.
6. Методику формирования математической модели неизменяемой части системы управления динамическим позиционированием судна на этапе исследовательского проектирования.
(анимация: 124 Кб, 3 кадра, задержка 3с, повтор кадров 4 раза)
С использованием разработанной методики выполнена имитационное моделирование судна, оборудованного СДП. Результаты моделирования практически подтвердили верность методики. Выполненные исследования убедительно показали реальную возможность сформировать математическую модель судна, оборудованного СДП, в условиях неполной и неточной информации, когда объект управления реально еще не существует, а информация о системе минимальна[7].
Примечание
При написании данного реферата выпускная работа магистра еще не завершена. Дата окончательного завершения работы: 1 декабря 2011 г. Полный текст работы и материалы по теме работы могут быть получены у автора или его научного руководителя после указанной даты.
Список литературы
-
Структура и принципы работы систем динамического позиционирования
Источник:http://vestnik.mstu.edu.ru/v12_2_n35/articles/12_barak.pdf
-
"Offshore hydromechanics", First Edition. J.M.J. Journee and W.W. Massie. Delft University of Technology. 2001y.;
-
"Guidance and Control of Ocean Vehicles", Fossen Thor I., 1994.
-
Lecture Notes:TTK4190 Guidance and Control, Ivar Ihle, NUST, Norway, 2006;
-
"Marine Control Systems", Fossen Thor I., 2002.
-
Петров Ю.П., Червяков В.В. Системы стабилизации буровых судов. Л., Судостроение, 216 с., 1985.
-
Гофман А.Д. Движительно-рулевой комплекс и маневрирование судна: справочник. Л., Судостроение,360 с., 1988.