
Источник: Науковi працi Донецького державного технiчного унiверситету. Серiя: Iнформатика, кфбернетика та обчислювальна технiка. Донецьк: ДонДТУ, 1999 . - Вип. 6.
Svjatnyj V.A. Problems of concurrent simulation of complex dynamic systems. The article considers requirements to the simulation means for dynamic systems and a concept of distributed concurrent simulation environment (DCSE). The characteristic of dynamic systems as objects of simulation is presented with special attention to differences in modeling and simulation approaches to dynamic systems with distributed (DSDP) and lumped parameters (DSLP). The concept of simulation environment includes SIMD and MIMD components taking into account specific features of dynamic systems of different types.
Прогрес сучасних галузей техніки, технологій та біотехнологій, технологій довкілля залежить від рівня теорії та практичної реалізації методів проектування автоматизованих технічних об'єктів, технологічних установок та ліній, що визначаються як складні динамічні системи (ДС). Центральною проблемою проектів ДС є гарантування новизни та якості проектних рішень. У переліку факторів безумовного вирішення цієї проблеми чільне місце займають методи та засоби моделювання динамічних систем, які можуть використовуватись на всіх етапах проекту ДС від формулювання техніко-економічних вимог до випробувань та початку експлуатації. Основи такого модельного супроводження проектів ДС були в значній мірі відпрацьовані на аналогових та аналого-цифрових засобах моделювання [1,2]. З середини 80-х років почався інтенсивний перехід до засобів цифрового моделювання: розроблені та імплементовані на всіх типах цифрових ЕОМ блоково- та рівнання-орієнтовані мови моделювання ДС [3,4,5], швидко розвивається апаратна база моделювання - персональні та супер-ЕОМ, паралельні обчислювальні системи SIMD та MIMD-архітектур. Саме останні покликані компенсувати відсутність надпотужних паралельних процесорів в моделюючих комплексах, які свого часу відіграли вирішальну роль у розробці аерокосмічних та технологічних ДС. Застосування паралельних ресурсів потребує нової системної організації засобів моделювання ДС, відкриває принципово нові можливості побудови моделей реальної складності та модельної підтримки проектів ДС. Розглянемо основні проблеми паралельного моделювання динамічних систем.
Динамічними називаються об'єкти техніки та технологій, в яких відбуваються цілеспрямовані керовані процеси змінів стану, що супроводжуються зміною параметрів стану у продовж певного часу. Динамічним системам притаманні два основних режими функціонування: стаціонарний режим з постійними параметрами та перехідний (динамічний) режим зі зміною параметрів.
З позицій моделювання динамічні системи розділяються на системи з концентрованими (ДСКП) та розподіленими (ДСРП) параметрами. Традиційно теорія і методи моделювання ДСКП та ДСРП являють собою самостійні наукові дисципліни. Практика показує, що ДСРП та ДСКП часто виступають як один і той же об'єкт дослідження: його розглядають спочатку як РП-об'єкт, а потім апроксимують КП-об'єктом з дотриманням відповідних умов. Тому назріла проблема розгляду ДСКП, ДСРП як об'єктів моделювання на загальних методичних засадах. Передумовою цього розгляду є формальний опис ДС. Ми будемо займатися тільки ДС реальної складності, тому у формальному описові виділимо дві принципово важливих частини, а саме - топологічний та математичний описи.
Топологія досліджуваних ДС задається технологічними схемами (ТС), структурними схемами автоматизації (ССА) та графами, а також комбінаціями цих засобів. Щодо ДС з розподіленими параметрами, то вони мають, окрім базової топології, що задається названими засобами, ще і похідні модельні топології, які виникають внаслідок апроксимації ДСРП об'єктами з концентрованими параметрами. Основна мета топологічного опису - дати чітке однозначне уявлення про структуру ДС, характер складових елементів та взаємозв'язків між ними, стимулювати автоматизацію формування математичного опису ДС у вигляді систем рівнянь великої мірності як композицію опису окремих елементів топології.
ДСКП описуються звичайними диференціальними та алгебраїчними рівняннями. Для ТС- та ССА-топологій, що відображають декомпозіцию системи на елементи, досить вивести рівняння для кожного елемента з урахуванням вхідних і вихідних параметрів. Правильно враховані зв'язки між елементами дають ефект композиції рівнянь елементів в систему рівнянь складної ДСКП. В загальному випадку система рівнянь включає:
Для формалізації та автоматичного генерування рівнянь ДСКП вводяться: вектори невідомих змінних, їх похідних та нелінійних функцій від них; матриці зв'язків "входи-виходи" відповідно до ТС- та ССА-топологій; матриці параметрів та вектори відомих функцій (характеристики активних елементів ДС - генераторів, насосів, турбокомпресорів, двигунів, вентиляторів і т. і.; детерміновані та випадкові функції впливу зовнішнього середовища); вектори допоможніх змінних для визначення похідних з порядками n>1.
Формальними матрично-векторними операціями можна привести математичний опис ДСКП до системи рівнянь у вигляді, придатному для чисельного вирішення:
Тут Y - вектор невідомих змінних; Х - вектор нелінійних функцій; F(t)- вектор функцій впливу зовнішнього середовища, - вектор характеристик активних елементів; A, B, C, D - матриці параметрів та зв'язків.
В ТС- та ССА-топологіях до системи (1) може додаватись система алгебраїчних рівнянь, яка описує статичні взаємозв'язки між параметрами, що можуть утворювати підвектор Y або бути визначеними як окремий вектор.
В динамічних системах мережної топології, що визначається графом, рівняння елементів (вузли та гілки) об'єднуються топологічними матрицями інциденцій та контурів в систему рівнянь, що визначає вектор потоків в гілках. Так, для електричної мережі маємо систему з n-1 рівнянь для вузлів

та y=m-n+1 рівнянь для контурів

де m, n - відповідно кількість гілок та вузлів; А, S - топологічні матриці, І, E(I,t) - вектори струмів в гілках та напруг генераторів, L, R, C-1 -діагональні матриці параметрів.
Динамічні системи з розподіленими параметрами описуються диференціальними рівняннями у часткових похідних. Особливість ДСРП ТС-, ССА-топологій полягає в тому, що вони мають змішану систему рівнянь: частина елементів топологій можуть бути об'єктами з розподіленими параметрами, які функціонують разом з динамічними та безінерційними об'єктами з концентрованими параметрами. З точки зору побудови ефективних моделей ДСРП розділяють на системи параболічного, гіперболічного, еліптичного та спеціального типів. До останнього, як правило, належить більшість систем реальної складності, де впливають такі властивості, як нелінійність, багатомірність, складність краєвих умов, тобто ті фактори, які виводять ДСРП за межі лінійних систем другого порядку [6]. Побудова моделей спеціальних ДСРП базується на фундаментальних дослідженнях систем перших трьох типів, містить у собі творчі задачі як у постановках проблем, виводах рівнянь, формулюванні краєвих умов, так і в пошуках ефективних методів чисельного вирішення рівнянь та організації функціонування моделей.
Аналіз досвіду розробки та застосування моделей динамічних систем [1,2,7], наявних мов моделювання [3,4,5], тенденцій та історії розвитку цифрових [8] та гібридних [9] засобів моделювання неперервних та неперервно-дискретних систем, врахування можливостей сучасних обчислювальних систем та їх програмного забезпечення показують, що на сьогодні та найближчу перспективу можна сформулювати такі основні вимоги до засобів моделювання ДСКП, ДСРП:
Спроби задовольнити ці вимоги визначають зміст сучасних досліджень у галузі моделювання динамічних систем.
Паралельним моделюючим середовищем (ПМС) для динамічних систем з концентрованими та розподіленими параметрами будемо називати таку системну організацію сумісного фукціонування апаратних ресурсів, системного та моделюючого програмного забезпечення, яка підтримує всі етапи побудови та використання моделей відповідно до сформульованих вище вимог.
Структура середовища показана на рис.1 . До апаратних ресурсів (ПМС-Hardware) залучено обчислювальні системи SIMD-, MIMD-архітектур та персональні ЕОМ, що об'єднуються в паралельно функціонуючі групи (кластери) за MIMD-принципом. Доступ до апаратних ресурсів відбувається з робочих місць, що є також потужними ПЕОМ, за мережною технологією. Апаратура модельно орієнтованих периферійних систем призначена для візуалізації та документування результатів моделювання ДСКП, ДСРП.
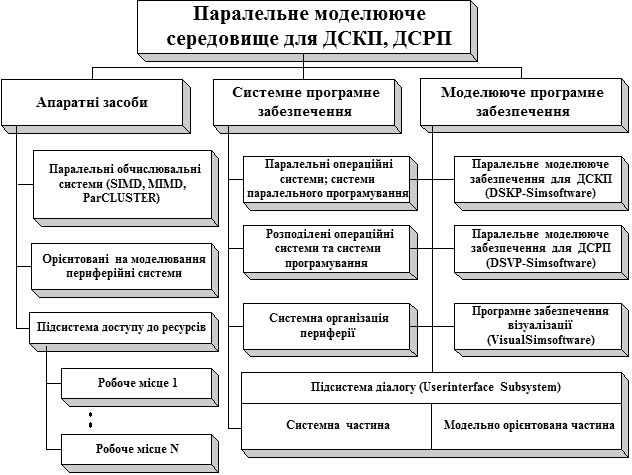
Рис.1 Структурна організація паралельного моделюючого середовища.
Системне програмне забезпечення ПМС складається з паралельних операційних систем SIMD- та MIMD-орієнтації, паралельних систем програмування, розподілених операційних систем мережної підтримки та системних засобів забезпечення роботи периферійного устаткування.
Моделююче програмне забезпечення має три основних складових частини - для моделювання ДСКП, ДСРП та забезпечення візуалізації.
В середовищі пропонується виділити підсистему діалогу, яка має системно- та модельно-орієнтовану частини.
Паралельне моделююче середовище має реалізуватись відповідно до наступних концептуальних положень. Розробки мають бути направлені на максимально можливе задоволення всіх вимог, які були сформульовані в п. 3. Це потребує різнорідних апаратних ресурсів та відповідних їм програмних рішень. Сьогодні та в найближчій перспективі розробники та користувачі моделей ДСКП, ДСРП зможуть одержати апаратні ресурси за структурою, що наведена на рис. 2 і має чітко виражений простірно розподілений характер:
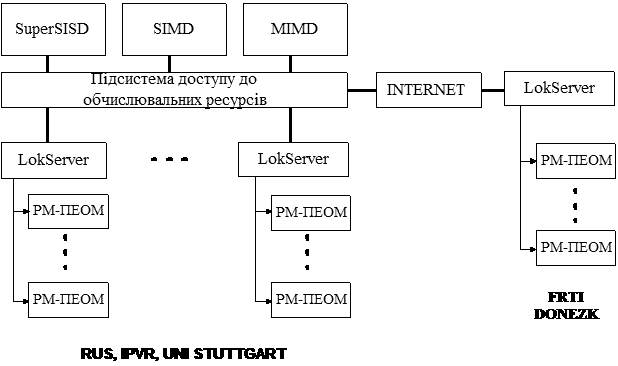
Рис. 2 Територіальна розподіленість паралельного моделюючого середовища.
доступ можливо мати як з робочих місць, територіально наближених до надпотужних обчислювальних систем (суперSISD, SIMD, MIMD), так і з суттєво віддалених. В останьому випадку має використовуватись INTERNET-технологія доступу. Передбачені структурою локальні сервери можуть мати паралельні ресурси, модельно орієнтоване периферійне обладнання та засоби побудови напівнатурних моделюючих комплексів. Структура рис.2 може бути реалізована в рамках функціонуючих надпотужних обчислювальних центрів (HPCC -High Performance Computer Center) та осередків INTERNET. Таким чином, мова йде про територіально розподілене паралельне моделююче середовище (РПМС). Головною проблемою є те, що програмне забезпечення паралельного моделювання ДСКП, ДСРП потребує повнофункціональної розробки. Аналіз показує, що паралельні системи SIMD- та MIMD-структур мають фірмові мови паралельного програмування, що базуються на мовах Fortran, C, C++, Modula-2 та ін. [10]. Спроба побудувати паралельні моделі ДСКП, ДСРП вимушує розробників працювати на рівні наявних мов, а це означає, що програмні засоби побудови паралельних моделей знаходяться на рівні систем моделювання не вище другого покоління за класифікацією, запропонованою в [8]. Концепція повнофункціональної розробки Simulationsofware РПМС повинна забезпечити користувачів та розробників паралельних моделей мовними та системно-організаційними засобами, які за рівнем сервісу будуть перевершувати системи моделювання п'ятого покоління [8].
В РПМС має бути забезпечена спадкоємність з засобами моделювання попередніх поколінь, що на сьогодні реалізовані в ЕОМ SISD-структури. Тим самим паралельне розподілене моделююче середовище буде максимально дружнім до користувача, дасть йому змогу "рости" від моделей простих об'єктів до моделей складних ДС, що потребують паралельної реалізації. Це буде також означати відкритість середовища для користувачів та розробників моделей, що працюють як індивідуально, так і колективно, в залежності від складності проблеми моделювання.
РПМС - це ще не досліджений об'єкт діалогу. Розробка та реалізація підсистеми діалогу має принципове значення у визначенні покоління засобів моделювання, до якого належить пропоноване середовище.
Можливість моделювати в рамках одного середовища системи з концентрованими і розподіленими параметрами об'єднує, з одного боку, ці дві галузі моделювання, що развивалися відносно автономно. З другого боку, це універсалізує та ускладнює РПМС. З огляду на цю обставину набувають важливої методичної ваги проблемно орієнтовані моделюючі середовища, побудова яких може розглядатись як складова частина загальної проблеми та набування досвіду паралельного моделювання ДС різної фізичної природи. Актуальною проблемою тут є об'єктно-орієнтована розробка моделюючих середовищ, яка в найбільшій мірі дозволить використати загальні системно-програмні рішення стосовно заданих предметних областей.
Різні принципи дії та рівні розпаралелювання SIMD- та MIMD-систем [10] зумовлюють необхідність побудови SIMD- та MIMD-компонент РПМС, вирішення задач їх взаємодії та автономного використання в рамках структур рис. 1, 2.
Масивно паралельна SIMD-компонента РПМС запропонована в [11]. Разом з колегами із Штуттгартського університету розроблена структура моделюючого програмного забезпечення, досліджені паралельні алгоритми моделювання ДСКП, ДСРП, розроблена підсистема діалогу, вирішено ряд тестових задач. Імплементація алгоритмів виконана на SIMD-мові паралельного програмування Parallaxis, а експериментальні дослідження - на SIMD-системі MasPar. Результати цих розробок опубліковані як доповіді на симпозіумах ASIM'94, EUROSIM'95, ASIM'96-97 [12]. Роботи продовжуються в таких напрямках: узагальнення досвіду паралельного моделювання на рівні мови програмування та розробка SIMD-мови моделювання у взаємозв'язку з побудовою підсистеми діалогу; дослідження аспектів об'єктно-орієнтованого підходу; побудова бібліотек паралельного моделювання ДСКП, ДСРП; експериментальні дослідження проблемно орієнтованих моделюючих SIMD-середовищ; застосування паралельних SIMD-моделей в гірничій галузі та навчальному процесі.
В структурах рис.1,2 MIMD-компонента представлена паралельними обчислювальними системами MIMD, їх системним та моделюючим програмним забезпеченням. Доступ до ресурсів цієї компоненти забезпечується з тих же робочих місць, що і до SIMD-компоненти. Головна проблема побудови MIMD-компоненти - це повнофункціональна розробка моделюючого програмного забезпечення, структура якого представлена на рис. 3 (для ДСКП) та на рис. 4 (для ДСРП). Підсистема діалогу (ПД) - це сукупність апаратних, програмних, мовних та візуальних засобів, що забезпечують активну взаємодію розробника та користувача паралельних моделей ДСКП, ДСРП з ресурсами MIMD-компоненти. ПД складається із системної та моделюючої частин. При розробленні та побудові ПД важливими є групи функцій обох частин, що названі на рис. 3. Формалізація цих функцій, дослідження повноти їх складу та MIMD-компоненти РПМС як об'єкта діалогу, імплементація та експериментальна перевірка функціонування ПД - це актуальні наукові та практичні задачі реалізації РПМС.
Нагальною потребою проблеми паралельного моделювання ДСКП, ДСРП є побудова мов моделювання, які б наблизили паралельні обчислювальні системи до рівня, що відповідає п'ятому поколінню систем моделювання, реалізованих в SISD-ЕОМ [8].
Відповідно до сформульованих вище концептуальних положень в MIMD-компоненті РПМС передбачені паралельні блоково-, рівняння-, та об'єктно-орієнтовані мови моделювання ДСКП (рис. 3). Незалежно від типу мови компілятор виконує перетворення специфікації моделі в функціонуючу паралельну програму та формує запит на MIMD-ресурс для реалізації моделі. Для моделювання ДСРП (рис.4) пропонуються рівняння- та об'єктно- орієнтовані мови специфікації моделей, на основі яких може бути виконана інтерактивна побудова ДСРП- моделей з використанням бібліотечних конструктивів. Досвід показує, що ДСКП-бібліотека повинна входити до складу ДСРП-бібліотеки.
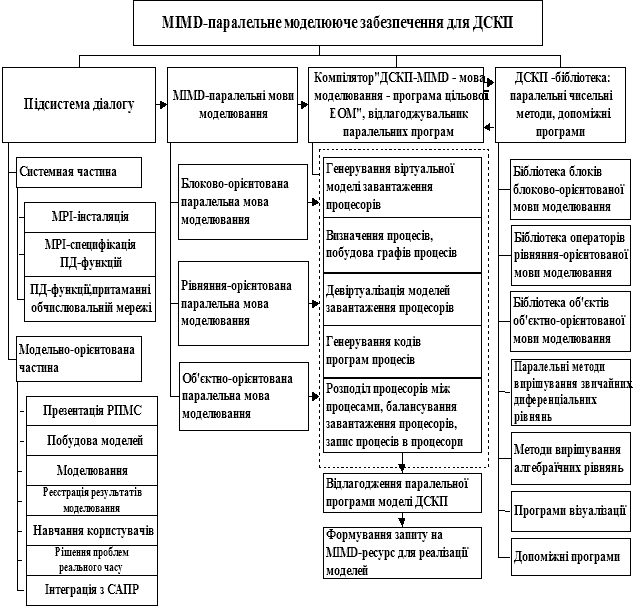
Рис. 3 Склад моделюючого програмного забезпечення MIMD-компоненти РПМС для ДСКП.

Рис. 4. Склад моделюючого програмного забезпечення MIMD-компоненти РПМС для ДСРП
Аналіз показує, що поряд з побудовою РПМС універсального призначення актуальними залишаються проблемно орієнтовані середовища, в яких акумулюється досвід моделювання в певних галузях техніки. В рамках запропонованої концепції нами виконуються розробки середовищ для динамічних мережних об'єктів з концентрованими та розподіленими параметрами, для хімічних технологій, для проблеми керування річковими суднами. Наукову та практичну цінність мають розробка та дослідження таких частин середовищ: вхідні мови специфікації об'єктів моделювання (ДСКП, ДСРП) на технологічному рівні; формальне описування топології та динамічних процесів; топологічні аналізатори; генератори рівнянь; вибір, обгрунтування методів паралельного рішення рівнянь ДСКП, ДСРП, побудова вирішувачів; побудова підсистеми діалогу, дружньої до експерта заданої предметної області, та ефективних засобів візуалізації результатів моделювання; інтеграція моделюючого середовища з САПР динамічних систем даної предметної області.
Проблема побудови РПМС є предметом наукового співробітництва факультету ОТІ з інститутом паралельних і розподілених надпотужних обчислювальних систем (IPVR) Штуттгартського університету. Вона входить також в державну програму України "Розробка конкурентоспроможних засобів моделювання складних систем". В рамках проблеми виконуються теми дисертаційних робіт аспірантів, курсових, дипломних та магістерськіх робіт студентів. Аспект побудови MIMD-компоненти на базі кластера паралельно працюючих ПЕОМ досліджується разом з інститутом моделювання та графіки (ISG) Магдебурзького університету. Експериментальні дослідження виконуються на емуляторі SIMD-систем, на 10-вузловому MIMD-комп'ютері Intel Paragon та на паралельних системах IPVR в режимі теледоступу (рис.2). Розробка проблемно орієнтованих середовищ виконується з інститутом системної динаміки та автоматичного керування (ISR) Штуттгартського університету і СДПП "Азот" (м. Сіверськодонецьк). Проблема інтеграції моделюючих середовищ з САПР досліджується разом з інститутом автоматизації та програмного забезпечення (IAS) Штуттгартського університету. За сприяння міністерства освіти та науки (BMВF) ФРН та кафедри автоматичного керування Ерлангенського університету обладнано 2 робочих місця для вирішення задач модельної підтримки проектування автоматизованих систем (проект PROAUT).
Паралельне моделювання динамічних систем з концентрованими (ДСКП) та розподіленими (ДСРП) параметрами є інтердисциплінарною проблемою, над вирішенням якої активно працюють інформатики, спеціалісти з моделювання, експерти різних предметних областей. Запропонована нами концепція розподіленого паралельного моделюючеого середовища як нової форми системної організації засобів моделювання ДСКП, ДСРП відкриває позитивні перспективи ефективного використання наявних паралельних обчислювальних ресурсів та комплексного вирішення проблеми. Побудова проблемно орієнтованих паралельних моделюючих середовищ в різних галузях техніки є важливим методичним кроком в використанні загальної концепції, нагромадження досвіду рішення прикладних задач, його узагальнення та використання в універсальному середовищі.