Комунікаційні засоби дозволяють виконувати різноманітний обмін інформацією між цифровими пристроями, що може відбуватися в різних видах – емуляція терміналів, обмін повідомленнями, використання дискового простору файлу-сервера, голосова і відео-конференцзв’язок по комп'ютерній мережі, прийом відеозображень і т.п. Різноманітність використання комунікацій, у більшій мірі, визначається встановленими вимогами до їх якості та швидкості.
Розробка пристроїв віддаленого керування об’єктами виявляється дуже актуальною задачею у напрямку створення пристроїв по облегшенню керування. Запропонований пристрій віддаленого керування забезпечує зв'язок між місцем знаходження оператора процесом та безпосередньо об’єктом за допомогою телефонної лінії. Керування в такій системі відбувається через телефонну лінію з використанням DTMF – кодів, специфіка яких дозволяє їх безперешкодно пересилати та приймати навіть при наявності у лінії перешкод. Кожен знак номера передається двохчастотним сигналом, згідно з табл. 1.
Усі частоти в табл. 1 були підібрані розробниками експериментально з тих міркувань, щоб при значних перешкодах в лінії зв’язку обидві частоти, що кодують цифру, впізнавалися приймальною схемою як можливо точніше і мали найменш можливе загасання.
| Таблиця 1 |
| Кодування знаків тонального набору номера |
|
1209 Гц |
1336 Гц |
1477 Гц |
1633 Гц |
| 697 Гц |
“1” |
“2” |
“3” |
“A” |
| 770 Гц |
“4” |
“5” |
“6” |
“B” |
| 852 Гц |
“7” |
“8” |
“9” |
“C” |
| 941 Гц |
“0” |
“*” |
“#” |
“D” |
Тривалість передачі DTMF-коду складає не менш 40 мс, пауза між набором різних цифр – не менш 25 мс. Це робить набір номера дуже швидким і зручним.
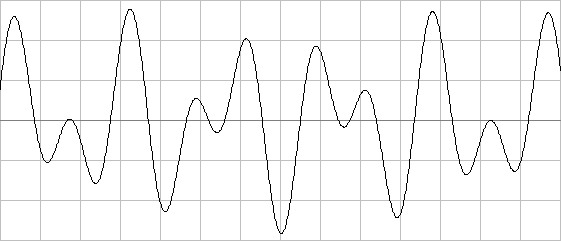
На рис. 1 приведена осцилограма DTMF-коду цифри “5”, котра складається з синусоїдальних сигналів з частотами 770 Гц та 1336 Гц.
|
Рисунок 1 – Осцилограма DTMF-коду цифри “5”
|
Пристрій віддаленого керування, що розробляється, зв’язує пульт керування оператора з об’єктами для керування за допомогою телефонної лінії. Таким чином, цей пристрій повинен мати функції передавання та приймання керуючих та інформаційних сигналів, яки б забезпечували повноцінний зв'язок між оператором та об’єктами.
Керуючими кодами пристрою є DTMF-коди, тому для коректного їх аналізу потрібно мати блок формування двійкового представлення отриманого коду.
Після прийому коду з лінії , пристрій здійснює аналіз керуючого коду та виконує формування керуючих дій над об’єктами.
Алгоритм керування блоками пристрою досить складний, тому до структури пристрою необхідно включити блок керування. Він може представляти собою керуючий автомат, мікропроцесорну секцію або мікроконтролер, тобто пристрій, що здатний виконувати заданий алгоритм керування. Кожен блок керування, що б він не уявляв, потребує блок скидання та синхронізації, також необхідний для нашого випадку.

|
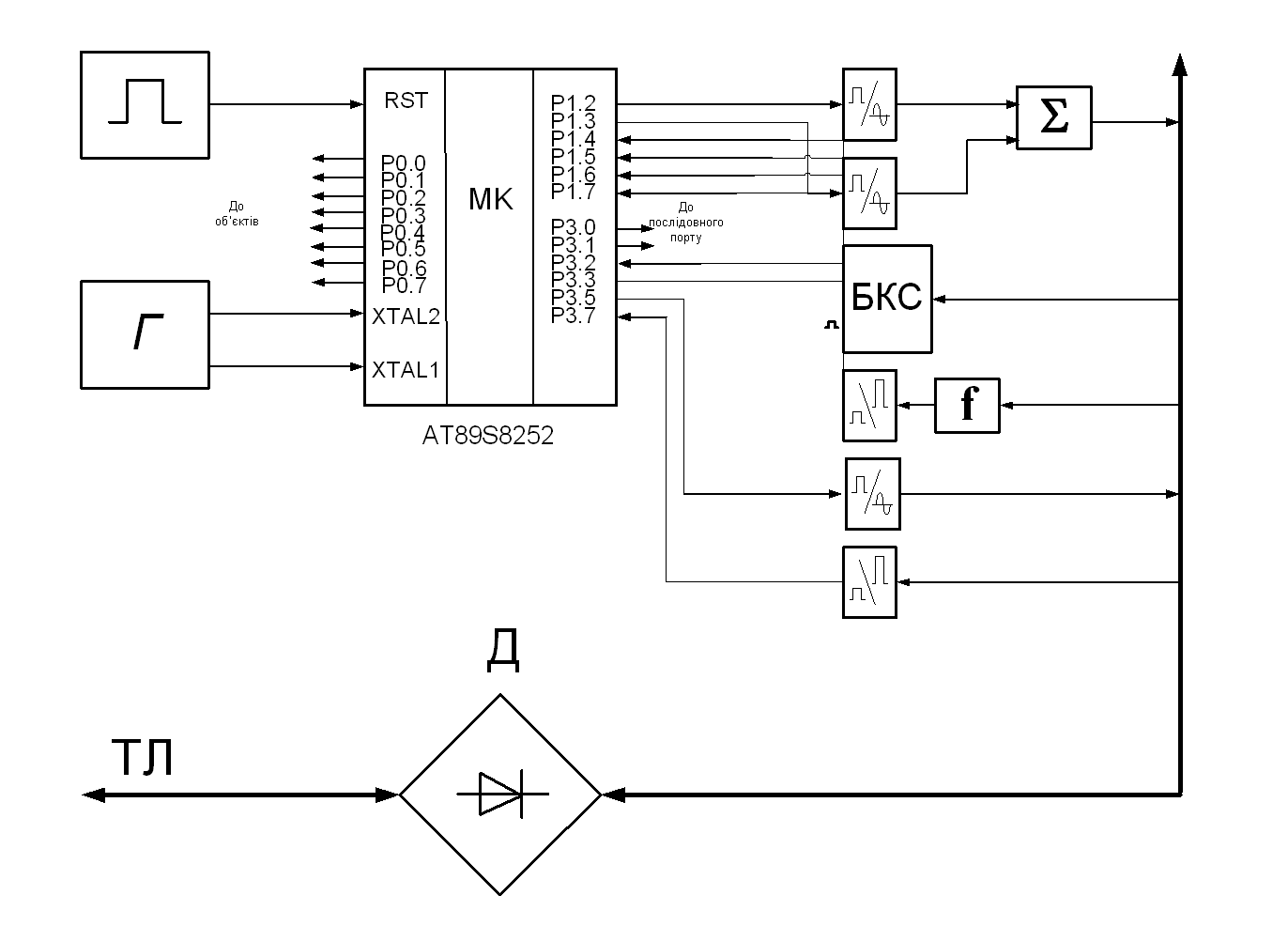
Рисунок 2 – Структурна схема пристрою віддаленого керування
|
Як видно з рис. 2, пристрій віддаленого керування має такі блоки:
1. БТГ (блок тонального генератора) виконує генерацію DTMF-коду в телефонну лінію (ТЛ) під керуванням блоку синхронізації.
2. БКС (блок формування коду сигналу) приймає код з телефонної лінії та перетворює його у двійковий код. Результат передається у блок керування.
3. БСЛ (блок стану лінії) перетворює рівні напруги станів “трубка покладена” та “трубка знята” телефонної лінії в логічні рівні блока керування.
4. БВВ (блок виявлення виклику) виявляє стан телефонної лінії – “виклик”, котрий значно відрізняється від інших станів лінії, та передає його до блоку керування.
5. БЗТ (блок зняття трубки) при надходженні сигналу виклику, схема імітує “зняття трубки” .
6. БК (блок керування) – це керуючий автомат, наприклад, із жорсткою логікою, або мікроЕОМ. До його функцій входять: прийом сигналів від БКС, БСЛ та БВВ, передача сигналів до блоку тонального генератора, утворення необхідних затримок, виконання алгоритму керування.
7. БСС (блок скидання і синхронізації) сукупність типових або специфічних схем скидання і синхронізації, необхідних для стабільної та надійної роботи блоку керування.
В роботі пропонується використовувати можливість мікроконтролера генерувати прямокутні імпульси заданої тривалості. Для тонального сигналу необхідно скласти два сигнали різної частоти. Мікроконтролер формує ці два сигнали прямокутних імпульсів на виходах портів. Потім перетворюються у синусоїдальні додаткові схемами та складаються. Для цього функціональна схема пристрою повинна мати два перетворювача сигналів та суматор.
Виходячи з приведених особливостей, була розроблена функціональна схема комутації пристрою з інтерфейсною лінією, яка представлена на рис. 3.
|
Рисунок 3 – Схема електрична функціональна пристрою віддаленого керування
|
Пристрій з боку об’єкта, в вихідному стані повинен очікувати виклик на лінії, тому перша вершина алгоритму перевіряти – є виклик, чи ні, аналізуючи стан порту Р3.7. Після виникнення виклику пристрій “знімає трубку”, тобто, займає лінію. Це відбувається при взведенні порту Р3.5. Після затримки необхідно перевірити стан лінії – чи не поклав трубку пристрій, що дзвонить з боку оператора. Для цього необхідно контролювати стан порту Р3.2. Якщо так – необхідно покласти трубку та чекати нового виклику, тобто починати алгоритм з початку. Для цьому, необхідно змінити стан порту Р3.5. Якщо лінія зайнята, необхідно приймати керуючий набір.
Пристрій з боку оператора виконує функції по підготовці та передаванню кодів команд від оператора. На початку роботи, пристрій повинен виконати зняття слухавки, за допомогою встановлення стану порта Р3.5. Далі оператор повинен виконати набір коду початку передачі (це код “*”). Після цього пристрій керування з боку об’єкту повинен послати відклик, тим самим сигналізуючи про можливість сприймання керуючих кодів. При отриманні відгуку, далі пристрій виконує послідовну генерацію керуючих DTMF-кодів в лінію. Останнім кодам, що пересилається, повинен бути код “#”. Цей код сповіщає пристрій-приймач про завершення процесу пересилання керуючих кодів. Після цих дій, пристрій переходить у початковий стан та очікує наступних керуючих кодів від оператора. На кожному етапі виконання алгоритму пристрій повинен контролювати стан лінії та при незапланованому покладені слухавки пристрій повинен починати алгоритм спочатку.
Під час виконання даної роботи були досліджені та засвоєні принципи розробки систем дистанційного керування об’єктом, а також способи використання тонової телефонної лінії та DTMF-кодів для цієї задачі.
В процесі виконання роботи було з’ясовано, що пристрій віддаленого керування повинен складатися з двох частин. Кожна з цих частин виконує задані алгоритмічні функції та використовує телефонну лінію у якості інтерфейсу зв’язку оператора з віддаленими об’єктами керування. Схематично обидві частині повністю аналогічні. Різниця частин полягає в алгоритмі виконання програми мікроконтролера. Ця різниця пояснюється місцем знаходження кожного з пристроїв.
Перелік посилань
[1] Сташин В.В. и др. Проектирование цифровых устройств на однокристальных микроконтроллерах. - М.: Энергоатомиздат, 1990. - 224с.
[2] ATMEL. “8-Bit Microcontroller with 2K Bytes Flash 89C2051”. 0368D-B-12/97.
[3] Хвощ С.Т., Варлинський Н.Н., Попов Є.А. Мікропроцесор та мікроеом в системах керування. Довідник. - Л.: Машистроєніє, 1987. - 640с.


