Abstract
Deep drilling on Mars can provide soil samples taken from depth which are of great scientific interest for analysis by the instrumentation present on-board a mission vehicle. The key to a successful sample collection and delivery is the development of a performing and reliable drill tool with sample collection capabilities, properly integrated in a complete drilling system.
Within this context, Galileo Avionica is involved in the design and development of drilling systems, including hardware prototyping and testing, suitable to operate in planetary and cometary environments. Several prototypes of drilling tools have been designed, manufactured and tested and new concepts are in the development pipeline. The testing so far performed indicate the feasibility of drill tools suitable to operate in very different types of soil and capable to reliably collect, recover and distribute samples to the possible scientific instrumentation.
nbsp The preliminary design of integrated drill systems, both employing a single drill tool or multiple rod assembled during operation, shows their ability to achieve performances in line with the resources allowed by a Mars vehicle.
nbsp This paper summarises the major developments being performed in this respect by Galileo Avionica with particular reference to the on going DeeDri (Deep Drill) program under ASI contract.
1. Introduction
The DeeDri program is funded by the Italian Space Agency (ASI) in the frame of the cooperation with NASA for the Mars Exploration Missions: within this program a core sampler mechanism is foreseen to collect Mars surface and subsurface soil samples and release them to the scientific instruments or storage system on the planetary landing vehicle. A prototype of the core sampler mechanism has been developed by Tecnospazio and Galileo Avionica in order to verify the functionalities, identify criticalities and better define requirements for future developments.
The drilling tool prototype consists of a hollow steel tube equipped with an auger thread on outer surface and a drill tip at the lower end. The tool drills a hole 35 mm in diameter and its central part (piston) can be withdrawn so to form a volume to allow sample core to be collected inside this opening. The core sample collected is 14 mm in diameter and 25 mm in length. The mechanism allows to
collect not only core samples but also powder-like samples. The tool diameter can be scaled down to allow drilling and sampling functionalities with a lower demand of power and force/torque actions. The Fight version of DeeDri is aimed at a larger penetration depth than the prototype and can be designed either as a single- or multi-rod system. The multi-rod approach is a specifically developed assembly technique of an appropriate number of drill rods: indeed the rods can be pipelined (and subsequently disassembled) with a speci4c drill tool forehead.
The achievable drilling depth of the DeeDri drill is up to 3 m. The drill can support direct down hole science by installing inside specific dedicated scientific instrumentation.
2. Drill system configurations

Two different DeeDri system conceptual designs are presented
in this paper:
1) Single-rod design suitable for 1 m depth.
2) Multi-rod design suitable for 3 m depth.
Both concepts make use of a special drill and sampling tool developed on purpose for the Mars drill; a prototype of this tool has been manufactured and tested with different materials as explained later. Multi-rod design makes use of a specifically developed drill pipe coupling concept based on thread, like the couplings of most of the conventional fully automatic rock drilling machines. Among several different connecting schemes the thread turned out to be most reliable with least risk for unintended release of the rod or failure to couple. The threaded coupling cannot be accidentally opened (in which case the complete drill string might be lost) by pulling, pushing or clock-wise twisting, or by any combination of these. Furthermore, autonomous release of the coupling during counter-clockwise rotation presents a naturally built-in safety mechanism that allows release of the drill rod in case it should get stuck in the soil. The coupling is equipped with an electrical feed-through for 10 lines to facilitate active drill-tool operations and other down-hole instrumentation. Both concepts include a slip ring assembly (10–15 lines depending on concepts) and a Fex-cable assembly to transfer power and data between s/c and possible drill tool instrumentation. In addition the system provides means to measure drill thrust, drilling torque and drill depth, and also to support the moving parts during s/c launch. Components selected for concepts design are either readily available as space-qualified (connectors, motors and resolvers) or off-the-shelfcommercial high-quality products (slip ring assembly, force sensors, bearings) which can be considered applicable for space application with specific adjustments.
2.1. Single-rod design
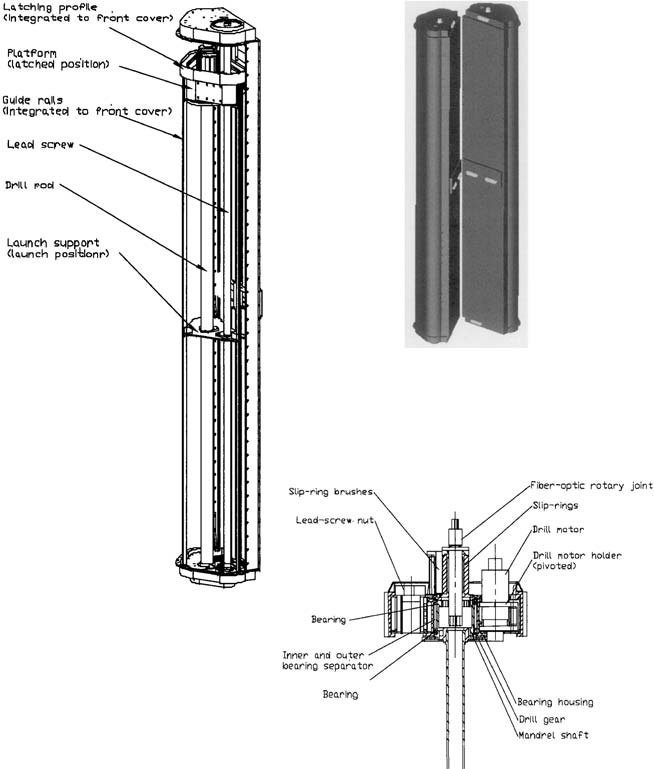
Fig. 1. The single-rod drill (1 m depth).
This design aims at high reliability and low mass by using one single drill tool (Fig. 1) without any disposable or interchangeable components. The single-rod design, drilling a hole 25 mm in diameter up to 1 m in depth, has dimensions 1251 mm x 220 mm x 155 mm, and it weighs about 7:32 kg, including an active motor operated sample collection tool inside the drill rod, and external cabling, positioning mechanism and control electronics. The collected sample can be ejected for separate sample storage or sample processing system on platform. After this, the sampling procedure can be repeated, thus allowing multiple sampling in several desired locations or varying depths. In addition to electrical feed-through,the system includes also an optical rotary feed-through (2 lines) for optical data transfer between drill tool and spacecraft. Complete redundancy of the system may be achieved by duplicating complete drill assembly.
2.2. Multi-rod design
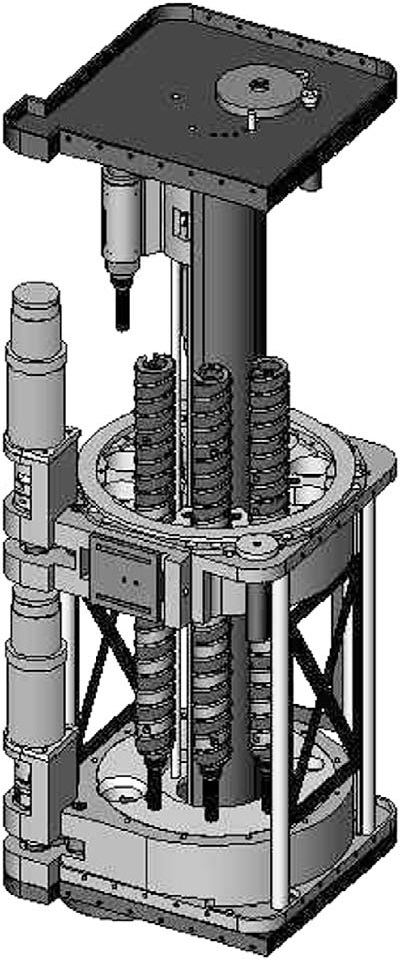
Fig. 2. Multi-rod drill (2.5–3 m depth).
The multi-rod design aims at a greater penetration depth with reduced system height in order to fit inside a more restricted volume on a small-sized planetary exploration vehicle. The drill rod is divided into up to ten separate drillpipes that are stored on a carousel inside the drilling system (Fig. 2).
The system provides a good versatility, since some of the drill pipes may be replaced with additional drill tools having different designs for different sampling operations. The introduction of a carousel and drill string extending/retrieval-system adds, however, further functionalities, increasing the overall complexity.
The multi-rod design presented in this paper aims at drilling into a depth of 2 .5 m, with a drill string consisting often drill pipes 23 mm in diameter. The current design is sized 540 mm Х 175 mm Х 175 mm weighing about 8300 g (excluding external cabling and control electronics). Penetration depth of3 m can be achieved by making the system 5 cm higher (with some mass increase). On the contrary, for a reduced 1 m drilling depth (always based on a multi-rod design) the height of the system can be lowered to 390 mm which decreases the system mass of about 400 g.
Components selected for the design are commercial high-quality products available off-the-shelf. Preliminary motor and gearbox selection is based on the choice of“ well sizing” to guarantee sufficient performance margin. Further analyses in detailed design phase may reveal that smaller motors may suffice and the total envelope and mass may be reduced motors may suffice and the total envelope and mass may be reduced.
The DeeDri program is funded by the Italian Space Agency (ASI) in the frame of the cooperation with NASA for the Mars Exploration Missions: within this program a core sampler mechanism is foreseen to collect Mars surface and subsurface soil samples and release them to the scientific instruments or storage system on the planetary landing vehicle. A prototype of the core sampler mechanism has been developed by Tecnospazio and Galileo Avionica in order to verify the functionalities, identify criticalities and better define requirements for future developments.
The drilling tool prototype consists of a hollow steel tube equipped with an auger thread on outer surface and a drill tip at the lower end. The tool drills a hole 35 mm in diameter and its central part (piston) can be withdrawn so to form a volume to allow sample core to be collected inside this opening. The core sample collected is 14 mm in diameter and 25 mm in length. The mechanism allows to
collect not only core samples but also powder-like samples. The tool diameter can be scaled down to allow drilling and sampling functionalities with a lower demand of power and force/torque actions. The Fight version of DeeDri is aimed at a larger penetration depth than the prototype and can be designed either as a single- or multi-rod system. The multi-rod approach is a specifically developed assembly technique of an appropriate number of drill rods: indeed the rods can be pipelined (and subsequently disassembled) with a speci4c drill tool forehead.
The achievable drilling depth of the DeeDri drill is up to 3 m. The drill can support direct down hole science by installing inside specific dedicated scientific instrumentation.
2. Drill system configurations
Two different DeeDri system conceptual designs are presented
in this paper:
1) Single-rod design suitable for 1 m depth.
2) Multi-rod design suitable for 3 m depth.
Both concepts make use of a special drill and sampling tool developed on purpose for the Mars drill; a prototype of this tool has been manufactured and tested with different materials as explained later. Multi-rod design makes use of a specifically developed drill pipe coupling concept based on thread, like the couplings of most of the conventional fully automatic rock drilling machines. Among several different connecting schemes the thread turned out to be most reliable with least risk for unintended release of the rod or failure to couple. The threaded coupling cannot be accidentally opened (in which case the complete drill string might be lost) by pulling, pushing or clock-wise twisting, or by any combination of these. Furthermore, autonomous release of the coupling during counter-clockwise rotation presents a naturally built-in safety mechanism that allows release of the drill rod in case it should get stuck in the soil. The coupling is equipped with an electrical feed-through for 10 lines to facilitate active drill-tool operations and other down-hole instrumentation. Both concepts include a slip ring assembly (10–15 lines depending on concepts) and a Fex-cable assembly to transfer power and data between s/c and possible drill tool instrumentation. In addition the system provides means to measure drill thrust, drilling torque and drill depth, and also to support the moving parts during s/c launch. Components selected for concepts design are either readily available as space-qualified (connectors, motors and resolvers) or off-the-shelfcommercial high-quality products (slip ring assembly, force sensors, bearings) which can be considered applicable for space application with specific adjustments.
2.1. Single-rod design
Fig. 1. The single-rod drill (1 m depth).
This design aims at high reliability and low mass by using one single drill tool (Fig. 1) without any disposable or interchangeable components. The single-rod design, drilling a hole 25 mm in diameter up to 1 m in depth, has dimensions 1251 mm x 220 mm x 155 mm, and it weighs about 7:32 kg, including an active motor operated sample collection tool inside the drill rod, and external cabling, positioning mechanism and control electronics. The collected sample can be ejected for separate sample storage or sample processing system on platform. After this, the sampling procedure can be repeated, thus allowing multiple sampling in several desired locations or varying depths. In addition to electrical feed-through,the system includes also an optical rotary feed-through (2 lines) for optical data transfer between drill tool and spacecraft. Complete redundancy of the system may be achieved by duplicating complete drill assembly.
2.2. Multi-rod design
The multi-rod design aims at a greater penetration depth with reduced system height in order to fit inside a more restricted volume on a small-sized planetary exploration vehicle. The drill rod is divided into up to ten separate drillpipes that are stored on a carousel inside the drilling system (Fig. 2).
The system provides a good versatility, since some of the drill pipes may be replaced with additional drill tools having different designs for different sampling operations. The introduction of a carousel and drill string extending/retrieval-system adds, however, further functionalities, increasing the overall complexity.
The multi-rod design presented in this paper aims at drilling into a depth of 2 .5 m, with a drill string consisting often drill pipes 23 mm in diameter. The current design is sized 540 mm Х 175 mm Х 175 mm weighing about 8300 g (excluding external cabling and control electronics). Penetration depth of3 m can be achieved by making the system 5 cm higher (with some mass increase). On the contrary, for a reduced 1 m drilling depth (always based on a multi-rod design) the height of the system can be lowered to 390 mm which decreases the system mass of about 400 g.
Components selected for the design are commercial high-quality products available off-the-shelf. Preliminary motor and gearbox selection is based on the choice of“ well sizing” to guarantee sufficient performance margin. Further analyses in detailed design phase may reveal that smaller motors may suffice and the total envelope and mass may be reduced motors may suffice and the total envelope and mass may be reduced.