
Реферат по теме выпускной работы
Содержание
- Введение
- 1. Автоматизированная система управления технологическим процессом и диспетчерское управление
- 2. Функциональная схема стенда
- 2.1 SCADA-система WinCC
- 2.2 Преобразователь частоты фирмы Control Technics
- 2.3 Программируемый логический контроллер VIPA
- 2.4 Исполнительный орган
- 3. Распределение функций в многоуровневой системе управления
- Выводы
- Список источников
Введение
Актуальность темы в том, что современная автоматизированная система управления технологическим процессом (АСУ ТП) представляет собой многоуровневую человеко-машинную систему управления [1]. Создание АСУ сложными технологическими процессами осуществляется с использованием автоматических информационных систем сбора данных и вычислительных комплексов, которые постоянно совершенствуются по мере эволюции технических средств и программного обеспечения [2].
Уровень развития современных средств вычислительной техники позволяет реализовывать сложные алгоритмы управления в реальном времени. Цифровые системы управления имеют ряд преимуществ по сравнению с аналоговыми, что выражается в простоте и гибкости реализации алгоритмов управления. На базе цифровой техники возможно построение многоуровневых, распределенных систем управления, взаимодействие между которыми осуществляется по компьютерным сетям [3].
Современные электропривода представляют собой сложные электромеханические системы, состоящие из преобразовательной техники, управляющих и информационных устройств и электрических машин [4]. В последнее время все большее распространение получают электропривода с цифровым управлением, работа которых определяется микроконтроллером, формирующим требуемые алгоритмы и законы управления. Таким образом, функционирование современных электромеханических системы с цифровым управлением определяется не только исправностью отдельных блоков и узлов системы, но и корректностью используемого программного обеспечения, согласующего и контролирующего работу этих узлов.
Поэтому знание вышеперечисленных компонентов очень важно для специалистов направления Электромеханика
, а для формирования у них необходимых практических навыков, необходимым условием является использование в учебном процессе современного специализированного лабораторного оборудования.
Цель работы – разработка лабораторного стенда для изучения и исследования многоуровневых систем управления электроприводом переменного тока.
1. Автоматизированная система управления технологическим процессом и диспетчерское управление
Непрерывную во времени картину развития АСУ ТП можно разделить на три этапа, обусловленные появлением качественно новых научных идей и технических средств. В ходе истории меняется характер объектов и методов управления, средств автоматизации и других компонентов, составляющих содержание современной системы управления [5].
Первый этап отражает внедрение систем автоматического регулирования (САР). Объектами управления на этом этапе являются отдельные параметры, установки, агрегаты. Решение задач стабилизации, программного управления, слежения переходит от человека к системе автоматического регулирования. У человека появляются функции расчета задания и параметров настройки регуляторов [6].
Второй этап – автоматизация технологических процессов. Объектом управления становится рассредоточенная в пространстве система. С помощью систем автоматического управления (САУ) реализуются все более сложные законы управления, решаются задачи оптимального и адаптивного управления, проводится идентификация объекта и состояния системы. Характерной особенностью этого этапа является внедрение систем телемеханики в управление технологическими процессами. Человек все больше отдаляется от объекта управления, между объектом и диспетчером выстраивается целый ряд измерительных систем, исполнительных механизмов, средств телемеханики, мнемосхем и других средств отображения информации (СОИ).
Третий этап – автоматизация систем управления технологическими процессами – характеризуется внедрением в управление технологическими процессами вычислительной техники. Вначале – применение микропроцессоров, использование на отдельных фазах управления вычислительных систем; затем – активное развитие человеко-машинных систем управления, инженерной психологии, методов и моделей исследования операций и, наконец, диспетчерское управление на основе автоматических информационных систем сбора данных и современных вычислительных комплексов [7].
От этапа к этапу меняются и функции человека (оператора/диспетчера), призванного обеспечить регламентное функционирование технологического процесса. Расширяется круг задач, решаемых на уровне управления. Ограниченный прямой необходимостью управления технологическим процессом набор задач пополняется качественно новыми задачами, ранее имеющими вспомогательный характер или относящимися к другому уровню управления.
Диспетчер в многоуровневой автоматизированной системе управления технологическими процессами получает информацию с монитора электронных вычислительных машин или с электронной системы отображения информации и воздействует на объекты, находящиеся от него на значительном расстоянии, с помощью телекоммуникационных систем, контроллеров, интеллектуальных исполнительных механизмов.
Концепция SCADA (Supervisory Control And Data Acquisition – диспетчерское управление и сбор данных) предопределена всем ходом развития систем управления и результатами научно-технического прогресса. Применение SCADA-технологий позволяет достичь высокого уровня автоматизации в решении задач разработки систем управления, сбора, обработки, передачи, хранения и отображения информации [8].
Дружественность человеко-машинного интерфейса (HMI/MMI – Human/Маn Machine Interface), предоставляемого SCADA-системами, полнота и наглядность представляемой на экране информации, доступность «рычагов» управления, удобство пользования подсказками и справочной системой и т. д. повышают эффективность взаимодействия диспетчера с системой и сводят к минимуму его критические ошибки при управлении [9].
Следует отметить, что концепция SCADA, основу которой составляет автоматизированная разработка и управление в реальном времени, позволяет решить еще ряд задач, долгое время считавшихся неразрешимыми: сокращение сроков разработки проектов по автоматизации и прямых финансовых затрат на их разработку.
B настоящее время SCADA является основным и наиболее перспективным методом автоматизированного управления сложными динамическими системами (процессами) [10].
2. Функциональная схема стенда
На рисунке 1 представлена функциональная схема стенда для исследования многоуровневой системы управления электропривода переменного тока. В нее входит персональный компьютер с установленной SCADA-системой WinCC (1), программируемый логический контроллер фирмы VIPA (2), преобразователь частоты фирмы Control Techniques – Unidrive SP (3), асинхронный двигатель (4).
Рисунок 1 – Функциональная схема стенда
2.1 SCADA-система WinCC
SCADA — программный пакет, предназначенный для разработки или обеспечения работы в реальном времени систем сбора, обработки, отображения и архивирования информации об объекте мониторинга или управления.
SCADA-системы решают следующие задачи:
- обмен данными с устройствами связи с объектами (УСО, то есть с промышленными контроллерами и платами ввода/вывода) в реальном времени через драйверы;
- обработка информации в реальном времени;
- логическое управление;
- отображение информации на экране монитора в удобной и понятной для человека форме;
- ведение базы данных реального времени с технологической информацией;
- аварийная сигнализация и управление тревожными сообщениями;
- подготовка и генерирование отчетов о ходе технологического процесса;
- осуществление сетевого взаимодействия между SCADA и ПК.
SCADA-системы позволяют разрабатывать АСУ ТП в клиент-серверной или в распределенной архитектуре.
Благодаря мощной интегрированной базе данных для архивирования данных процесса, большому количеству инструментов для обработки, передачи и анализа информации и открытых интерфейсов для интеграции, была выбрана SCADA-система фирмы Siemens – WinCC.
SIMATIC WinCC – базовые функциональные модули:
- WinCC Explorer – быстрый обзор всех данных проекта, глобальных установок, запуска редакторов и режима Runtime, конфигурация системы
Клиент-сервер
. - Graphics Designer – разработка мнемосхем с помощью стандартных элементов, объектов из встроенной библиотеки.
- Alarm Logging – сбор и архивация сообщений. WinCC поддерживает два метода генерации сообщений: с помощью тегов ПЛК и в виде пакетов сообщений. Сообщения могут генерировать звуковые сигналы.
- Tag Logging – сбор, архивирование и сжатие измеряемых величин. База данных основана на MS SQL Server. Архивация производится циклически, или управляется событиями в системе. Может производиться архивация отдельных тегов или целиком блоков данных ПЛК. Данные из архива могут отображаться в виде кривых или таблиц. Возможно создание долговременных архивов данных.
- Report Designer – генерация отчетов в свободно программируемом формате, управляемая событиями или по времени. Возможна генерация протоколов сообщений, измеряемых величин и пользовательских отчетов. В отчет можно включать данные из CSV файлов и баз данных. Возможен предварительный просмотр отчетов и сохранение их в файл.
- Global Scripts – программирование действий, производимых с графическими объектами, а также скриптов, выполняющихся в фоновом режиме, на языках ANSI-C или Visual Basic Scripts.
- Menus & Toolbars – редактор, позволяющий создавать пользовательские меню и панели инструментов для мнемосхем и всплывающих окон.
- User Administrator – удобное управление правами доступа пользователей.
- Basic Process Control – набор инструментов, таких как автопостроение иерархии мнемосхем, синхронизация времени в системе, конфигурация проектов с несколькими мониторами, автопостроение экрана диагностики и др.
Рисунок 2 – WinCC Explorer
2.2 Преобразователь частоты фирмы Control Technics
Unidrive SP – это универсальный преобразователь частоты, который может являться основой системы управления технологическим процессом [11]. (рис. 3)

Рисунок 3 – Unidrive SP
Основные особенности преобразователя частоты серии Unidrive SP:
- функция автонастройки позволяет создать точную модель привода, измерив моменты инерции и нагрузки без вращения вала и с вращением;
- открытая архитектура конструкции позволяет без труда расширить функции привода с помощью подключения дополнительных модулей – модулей входов/выходов, встраиваемого контроллера, коммуникационных модулей;
- возможность доступа к базовому и расширенному меню с помощью встроенной панели;
- функция изменения частоты коммутации от 3 до 18 КГц;
- наличие встроенного тормозного транзистора;
- возможность подключения по шине Modbus RTU RS 485 через разъем RJ45 уже в стандартной комплектации;
- наличие 5 аналоговых входов, 7 цифровых входов/выходов и 1 выхода защитного отключения.
2.3 Программируемый логический контроллер VIPA

Рисунок 4 – VIPA 313SC Speed7
Программируемые логические контроллеры являются основой для построения систем автоматизации во всех отраслях промышленности [12]. Наряду с оборудованием известных производителей ПЛК, таких как Siemens, Schneider на сегодняшний день на рынке представлены новые разработки, отличающиеся прогрессивными техническими решениями.
Программируемый логический контролер (ПЛК) VIPA 313SC Speed7 предназначен для решения задач центральной и распределенной системы автоматизации с большим количеством сигналов критических ко времени выполнения.
Особенности:
- процессор выполнен по технологии Speed7, которая позволяет решать поставленные задачи с гораздо большей скоростью;
- высокоскоростная шина расширения Speed-bus;
- подключение на Speed-bus высокоскоростных модулей;
- в комплект входят блоки аналоговых и цифровых входов/выходов;
- имеет встроенный термопреобразователь Рt100;
- возможность работы без МСС карты;
- на процессорном модуле имеются разъемы для подключения к сети MPI и Ethernet;
- взаимозаменяемость модулей ввода-вывода с модулями Simatic S7-300 фирмы Siemens.
Разработка программы для управления установкой от ПЛК VIPA осуществляется с помощью программного обеспечния (ПО) WinPLC7. Это ПО предназначено для конфигурирования, программирования и отладки программ для контроллеров VIPA всех серий.
WinPLC7 содержит все необходимые инструменты для создания проекта:
- редактор программ;
- эмулятор контроллера;
- конфигуратор аппаратной части;
- символьный редактор.
Для программирования систем автоматизации в пакете WinPLC7 могут быть использованы три языка программирования:
- Statement List (STL) – язык инструкций;
- Ladder Diagram (LAD) – язык лестничных диаграмм;
- Function Block Diagram (FBD) – язык функциональных блоков.
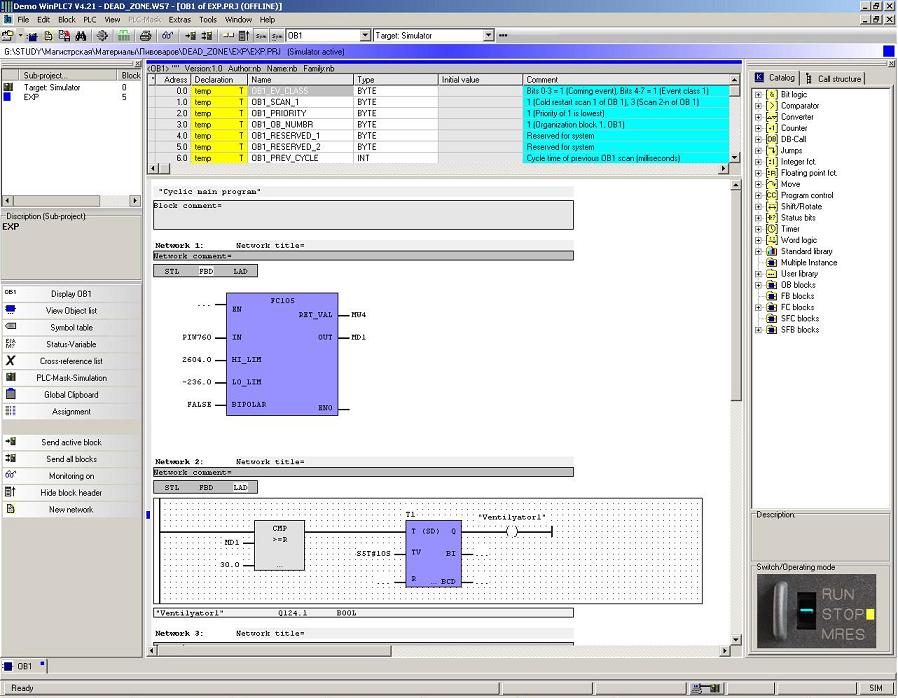
Рисунок 5 – Рабочая область ПО WinPLC7
2.4 Исполнительный орган
В качестве исполнительного органа выступает короткозамкнутый трёхфазный асинхронный двигатель (АД) фирмы Siemens. (рис. 6)
Рисунок 6 – Асинхронный двигатель фирмы Siemens
Паспортные данные:
f = 50 Гц
U = 230 В
P = 0,25 кВт
I = 1,78 А
cosφ = 0,64
n = 685 об/мин
3. Распределение функций в многоуровневой системе управления
В многоуровневой системе управления на каждый её отдельный элемент возложены определенные функции [13]. Рассмотрим функции, которые возложены на каждый отдельный элемент стенда.
SCADA-система WinCC:
- визуализация технического процесса;
- хранение нормативно-справочной информации;
- интерфейс оператора;
- формирование управляющего воздействия на ПЛК;
- обработка данных от ПЛК.
Программируемый логический контроллер VIPA:
- обработка сигналов от датчиков;
- реализация управления технологическим процессом;
- выдача управляющего воздействия на электродвигатель;
- обработка информации обратных связей от привода;
- взаимодействие с операторным уровнем.
Преобразователь частоты Unidrive SP:
- регулирование напряжения и частоты питания АД для обеспечния заданных параметров технологического процесса;
- реализация функций энергосбережения;
- оптимизация скоростных и нагрузочных диаграмм;
- самодиагностика и диагностика АД.
Выводы
При разработке многоуровневой системы управления возникают вопросы, на которые нужно найти ответы:
- найти оптимальные решения по аппаратному и программному взаимодействию компонентов;
- правильно распределить задачи, решаемые на разных уровнях по критериям высокого быстродействия, использования вычислительной мощности и загрузки сети;
- обеспечить высокую надежность функционирования за счет использования диагностики и самодиагностики отдельных компонентов и системы в целом;
- реализовать удобный для использования человеко-машинный интерфейс и структуру отчетных документов.
Важное замечание
На момент написания данного реферата магистерская работа еще не окончена. Окончательное завершение работы состоится в декабре 2012 года.
Список источников
- Густав Олссон, Джангудио Пиани. Цифровые системы автомтаизации и управления.-СП б.: Невский Диалект, 2001 – 557 с.
- Денисенко В.В. Компьютерное управление технологическим процессом, экспериментом, оборудованием. – М.: Горячая линия, Телеком, 2009.-608 с.
- Передача данных в системах контроля и управления: практическое руководство /Парк Дж., Маккей С., Райт Э.: (превод с англ. Савельева В.В) –М.: ООО «Группа ИДТ», 2007.-480 с.
- Doncker Rick, Duco W.J.Pulle, Velman Andre/ Advanced Electrical drives. Springer, London/New York, 2011. – 475 p.
- Информационный сайт o-asutp.ru [Электронный ресурс]. – Режим доступа: http://www.o-asutp.ru/asutp_...
- Бесекерский В. А. Теория систем автоматического регулирования. / Бесекерский В. А., Попов Е. П./ М., Наука, 1966.
- Simatic Totally Integrated Automation [Электронный ресурс]. – Режим доступа: http://www.ste.ru/siemens/...
- SCADA – Википедия [Электронный ресурс]. – Режим доступа: http://ru.wikipedia.org/wiki/SCADA
- Daneels A., CERN, Salter W., WHAT IS SCADA?// International Conference on Accelerator and Large Experimental Physics Control Systems, 1999, Trieste, Italy, pp.349-343
- SCADA-системы: взгляд изнутри/ Андреев Е.Б., Куцевич Н.А., Синенко О.В. – М.: Издательство «РТСофт», 2004. – 176 с.: ил.
- Расширенное руководство пользователя Unidrive SP[Электронный ресурс]. – Режим доступа: http://www.proavtomatika.ru/docs/...
- Парр. Э. Программируемые контроллеры: руководство для инженера/Парр Э. пер. 3-го англ. изд.-М.: БИНОМ, 2007.-516 с.
- Белов М.П. Инжиниринг электроприводов и систем автоматизации: учеб. пособие / Зементов О.И., Козярук А.Е. и др.; под ред. Новикова В.А., Чернигова Л.М.. – М.: Изд. центр «Академия», 2006. – 416с.