Мехатронная система перемещения конвейера механизированного комплекса
Автор: Семенченко А.К., Гиниевская И.С..
Источник: Механика жидкости и газа/ Материали Х международной научной студенческой конференции . — Донецк, ДонНТУ — 2011
Автор: Семенченко А.К., Гиниевская И.С..
Источник: Механика жидкости и газа/ Материали Х международной научной студенческой конференции . — Донецк, ДонНТУ — 2011
Семенченко А.К., Гиниевская И.С. Мехатронная система перемещения конвейера механизированного комплекса. Представлена структура мехатронной системы перемещения конвейера с вариантом адаптивной системы управления.
Сегодня основными характеристиками развития горной промышленности в Украине является интенсификация работ и снижение себестоимости угля, что достигается за счет роста нагрузки на очистные забои, увеличением их длины и вместе с этим сокращением их количества. В перспективе планируется увеличить производительность угледобычи с одной лавы до 10 тыс. т угля в сутки и свыше, таким образом ставиться задача создания угледобывающих предприятий типа «лава–шахта». В связи с этим к горному оборудованию предъявляются все возрастающие требования к показателям ресурса, надежности и производительности, которые невозможно обеспечить без оснащения их различными системами автоматического управления и диагностики [1, 2].
В настоящее время интенсивно развивается совершенствование комплексов с повышением надежности и ресурса машин и оборудования, отработкой программируемых систем диагностики технического состояния машин, систем, режимов работы и автоматизированного управления, чем достигается высокая устойчивость работы комплексов в рациональных режимах [3].
На фоне комплексной мехатронизации и интенсификации очистных работ возникает необходимость в обеспечении высокого ресурса и надежности конструктивных элементов системы перемещения конвейера, а также в увеличении скорости передвижки конвейера и секций механизированной крепи вслед за проходом комбайна.
Как известно процесс выемки угля механизированным комплексом сопровождается перемещением гидродомкратами передвижки механизированной крепи ее секций и конвейера, который является направляющей базой для очистного комбайна [4]. На сегодня наиболее распространенной является волновая передвижка конвейера (рис.1).
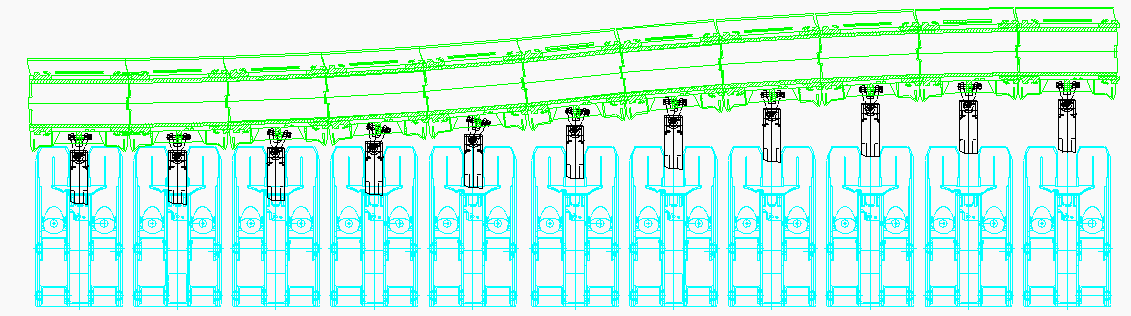
Рис. 1 – Волновая передвижка конвейера гидроцилиндрами крепи
Существующий процесс передвижки рештаков сопровождается рядом недостатков [4, 5], а именно:
- управление системой передвижки является ручным;
- возможно срабатывание предохранительных клапанов и появление максимальных нагрузок в элементах системы перемещения, которые нежелательны, так как значительно влияют на снижение их ресурса;
- исключается возможность выбора оптимальной схемы передвижки, которая позволила бы ускорить процесс ее реализации и снизить нагруженность элементов системы перемещения.
Дальнейшее совершенствование системы перемещения конвейера предполагает ее мехатронизацию на базе адаптивной системы управления [6], которая обеспечит возможность увеличения ресурса гидродомкратов за счет исключения максимальных нагрузок, и вместе с этим будет осуществлять выбор наиболее оптимального по времени и усилиям алгоритма перемещения рештаков.
Цель данной работы – разработать структуру мехатронной системы перемещения рештаков конвейера механизированного комплекса с адаптивной системой оптимизации процесса их передвижки.
В связи с потребностью в усовершенствовании системы передвижки конвейера была разработана структура мехатронной системы перемещения рештаков конвейера с адаптивной системой управления, которая представлена на рисунке 2.
Основными элементами этой структуры являются:
Pi, Pi+1 – пространственно перемещающиеся массы i-го и (i+1)-го рештака;
Ci – пространственно перемещающаяся масса i-й секции крепи;
OXYZ—система координат, жестко связанная с забоем;
ГД – гидродомкрат передвижки;
БУ – блок компьютерного управления гидрораспределителем;
АР – автомат разгрузки;
ГА – гидроаккумулятор;
ГР – гидрораспределитель;
ДР – дроссель;
DПi – i-й датчик положения штока гидродомкрата передвижки;
DPi – i-й датчик давления в гидродомкрате системы;
DСi – i-й датчик усилий в соединениях рештаков;
DГРi - i-й датчик состояния распределительных устройств.
Описание принципа действия системы управления.
Сигналы от датчиков (датчики положения, параметров, состояния распределительных устройств и усилий в соединениях) поступают на сенсорную систему, которая воспринимает эти сигналы и передает информационной системе.
Информационная система производит визуализацию поступившей информации и выдает ее оператору, а также передает информацию на адаптивную систему управления для оптимизации управления процессом передвижки. Оператор выбирает тот или иной алгоритм перемещения конвейера. В адаптивной системе управления отрабатывается сигнал по управлению блоками передвижки, посредством которых реализуется тот или иной алгоритм передвижки. Изначально алгоритм предусматривает перемещение рештаков конвейера через один, как наиболее приоритетный, что обосновано в работе [5], однако, если усилия перемещения окажутся большими, будет применен другой алгоритм.
Таким образом, производится перебор нескольких вариантов передвижки, из которых выбирается наиболее оптимальный по времени передвижки и усилиям в системе, что обеспечивает возможность исключить максимальные нагрузки на конечном этапе передвижки, повысить ресурс гидродомкрата передвижки и гидромагистралей.
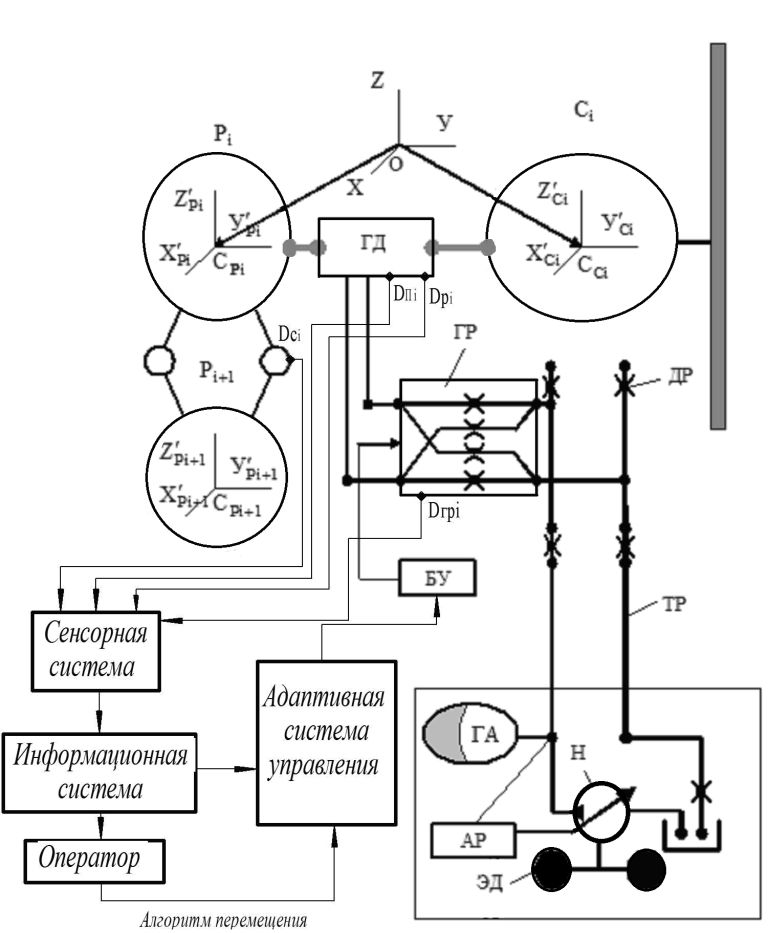
Рис. 1 – Структура мехатронной системы перемещения конвейера с адаптивной системой управления.
1. Отличительные особенности машин современных механизированных комплексов / Н.И. Стадник, А.В. Сергеев, А.В. Мезников, В.П. Кондрахин. – Донецк: С. 111.
2. К вопросу повышения технического уровня высокопроизводительных комплексов / Семенченко А. К., Шабаев О. Е., Семенченко Д. А., Степаненко Е. Ю., Мотин Н. Н. // Наукові праці Донецького національного технічного університету, випуск 14 (127), Серія: гірничо-електромеханічна, Донецьк - 2007.
3. Очистные механизированные комплексы для добычи угля в длинных забоях / Габов В.В. проф., // Горная техника - 2004
4. Горные машины для подземной добычи угля: Учеб.пособ. для вузов / П.А. Горбатов, Г.В. Петрушкин, Н.Н. Лысенко, С.В. Павленко, В.В. Косарев; Под общ. ред.П.А. Горбатова. – Донецк, 2006. – 669с.
5. А.К. Семенченко, Д.Э. Макаренко, Ю.М. Кирилюк. Математическая модель перемещения конвейера и секции механизированной крепи очистного комплекса. УКД 622.232/ Научные работы ДонНТУ-2010.
6. Обоснование параметров системы перемещения конвейера и секции крепи комплекса МДМ / Д.Е.Макаренко. квалиф. магистр. раб., ДонНТУ – 2010.