Назад
в библиотеку
Программно-аппаратный комплекс
управления и защиты шахтных подъемных машин
Авторы:
М.К. Бочаров, А.А. Дубинский,
А.Б. Кац
Источник:
Украинский научно-исследовательский, проектно-конструкторский и
технологический институт взрывозащищенного и рудничного
электрооборудования с опытно-экспериментальным
производством [Электронный
ресурс]. – Режим доступа:
http://ukrniive.com.ua/ru/
Аннотация
М.К. Бочаров,
А.А. Дубинский,
А.Б. Кац
–
Программно-аппаратный комплекс управления и
защиты шахтных подъемных
машин.
Применение современных
средств микропроцессорной техники с программно-аппаратными
компонентами, выполняющими функции управления различными типами
главного привода шахтных подъемных машин,в управлении и защите шахтных
подъемных машин.
Постановка
проблемы
При
проектировании новых и модернизации существующих поверхностных шахтных
подъемных машин (ШПМ) актуальной задачей является применение
современных программируемых средств управления и визуализации на основе
микропроцессорных контроллеров и промышленных персональных компьютеров,
соединенных в единую информационно-управляющую систему.
Цель
исследования
Внедрение
программируемой микропроцессорной техники предоставляет новые
возможности для управления ШПМ, реализации защитных функций, функций
контроля оборудования и диагностики неисправностей, а также для
визуализации текущего состояния параметров технологического процесса.
Благодаря этому повышаются безопасность, надежность, производительность
и точность отработки управляющих воздействий. Подобные системы обладают
следующими преимуществами:
- возможность оперативного
перепрограммирования и гибкой настройки устройств управления;
- осуществление сложных
вычислений в реальном времени;
- точность отображения
параметров объекта (скорости, положения) за счет повышения разрешающей
способности первичных датчиков;
- безопасность, достоверность
и простота выполнения процедур тестирования защит с возможностью
хранения в памяти протоколов проверки;
- возможность организации
развитой самодиагностики узлов системы, в частности, сравнения значений
скорости перемещения сосудов, измеренной разными устройствами;
- наличие системы встроенной
диагностики аппаратной части программируемого устройства (обнаружение
неисправных либо отсутствующих модулей, тестирование памяти, контроль
параметров системы питания);
- вывод информации на
видеотерминал станции оператора в виде гистограмм, графиков, цифровых
значений и текстовых сообщений;
- упрощение информационных
связей с полупроводниковыми преобразователями главного привода ШПМ, что
позволяет оперативно изменять управляющие сигналы задания скорости,
темпа разгона, вращающего момента электропривода, используемые при
организации ее движения по заданной диаграмме;
- вывод параметров
электропривода и сообщений о его работе на экран видеотерминала станции
оператора, архивирование и, при необходимости, передача этой информации
в шахтную информационную сеть.
Результаты
исследований
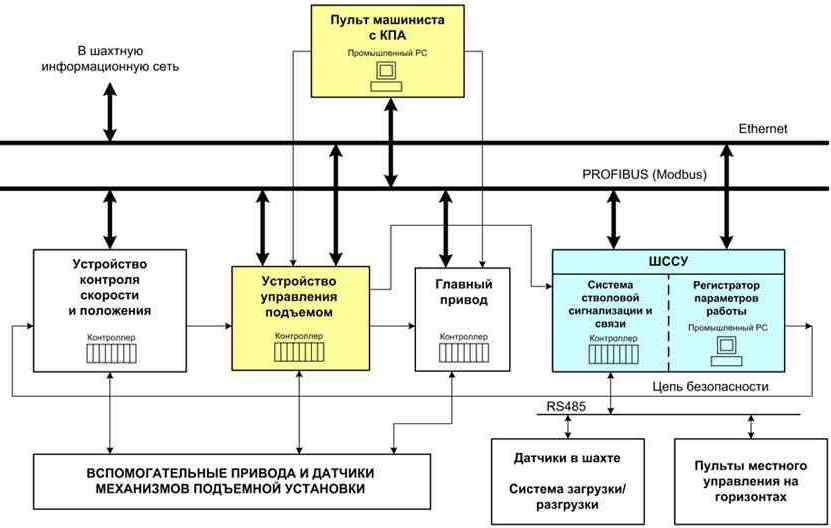
Структура
такого программно-аппаратного комплекса (рисунок 1) включает следующие
устройства.
Рисунок
1 – Структура системы управления главным приводом и
технологической автоматикой подъемной установки
- Устройство контроля скорости
и положения подъемных сосудов. Основными функциями устройства являются
определение положения и скорости движения подъемных сосудов в стволе,
формирование требуемой тахограммы движения, защита от превышения
допустимой скорости, а также контроль целостности кинематической цепи и
датчиков положения и скорости. Кроме программного самоконтроля работы,
устройство осуществляет перекрестную проверку вычисленных сигналов
скорости и положения сосудов с непосредственно измеряемыми сигналами,
поступающими от независимых датчиков – абсолютного датчика
положения и импульсных датчиков скорости. Защита от превышения
максимальной скорости и переподъема сосудов дополнительно
осуществляется аппаратными средствами независимо от основного
контроллера. Для устранения погрешности вычисления положения, связанной
с вытяжкой канатов и износом фрикционных накладок на барабанах ШПМ,
устройство выполняет автоматическую синхронизацию в нижнем положении
сосуда по путевому выключателю. Одним из наиболее подходящих для
выполнения описанных функций с высокой точностью, быстродействием и
надежностью является микропроцессорный контроллер AC800M [1]
производства фирмы ABB Automation, широко применяемый для управления
электроприводами ШПМ и специально ориентированный для контроля
подъемных установок всех типов.
- Устройство
управления
подъемом. Устройство предназначено для обработки управляющих
воздействий, поступающих с пульта управления машиниста подъема,
управления главным приводом, вспомогательными приводами, системами
рабочего и предохранительного торможения. Независимо от типа главного
привода устройство может базироваться на контроллере AC800M или на
аналогичных контроллерах других производителей.
- Главный привод. В настоящее
время для одно- и двухбарабанных, а также для многоканатных ШПМ могут
применяться следующие виды электроприводов:
- электропривод
с асинхронным двигателем с фазным ротором и реостатным регулированием
при напряжении 0,66 или 6 кВ мощностью до 1250 кВт. Неэкономичный,
морально устаревший электропривод;
- электропривод
по схеме
«тиристорный
преобразователь-двигатель» (ТП-Д) с преобразователями
постоянного тока, выпускаемыми как украинскими производителями,
например ОАО «Преобразователь» (Запорожье), так и
иностранными фирмами ABB, Siemens и другими мощностью до 5 мВт. По
технико-экономическим показателям уступает электроприводам переменного
тока с силовыми полупроводниковыми преобразователями;
- низковольтный
частотно-управляемый электропривод с асинхронными
двигателями с короткозамкнутым ротором и преобразователями частоты на
номинальное напряжение 0,66 кВ мощностью до 1250 кВт. Современный
электропривод с хорошими экономическими
показателями; преобразователи
частоты с требуемыми техническими характеристиками серийно выпускаются
только ведущими мировыми производителями, например фирмами ABB и
Siemens. Отечественные разработки в этой области находятся в настоящее
время на стадии опытных образцов;
- высоковольтный
частотно-управляемый электропривод на основе синхронных
или асинхронных двигателей и преобразователей частоты с выходным
напряжением 2,4...12 кВ мощностью до 27 МВт. Наиболее экономичный
электропривод для ШПМ с мощностью двигателей от 2,5 МВт.
Преобразователи частоты с непосредственной связью, обеспечивающие
свободный обмен энергии с питающей сетью, выпускаются фирмами ABB
(Финляндия) и Siemens (Германия). Разработки преобразователей на основе
инверторов напряжения с широтно-импульсной модуляцией находятся на
стадии опытных образцов.
Для приводов с
полупроводниковыми преобразователями встроенный в
преобразователь контроллер может легко интегрироваться в систему с
устройством управления приводом и регистратором параметров, для привода
с реостатным регулированием целесообразно применять отдельный
контроллер управления.
- Регистратор
параметров.Это
устройство выполняет функции хранения и
отображения информации о работе всех элементов ШПМ, позволяет
осуществить диагностику, контрольные тесты, быстрый поиск
неисправностей [2].
Регистратор выполнен
на базе
промышленного компьютера под управлением
операционной системы Windows с необходимыми устройствами расширения и
стандартной клавиатурой. Сохраняемая и отображаемая информация содержит
следующие разделы:
- контроль движения
подъемных сосудов;
- состояние технологических
механизмов (положение и функционирование
скипов, конвейеров загрузки, шиберов бункера);
- главный привод;
- вспомогательные приводы и
цепи питания;
- тормозная
система;
- сети коммуникации и связи,
цепи датчиков;
- технологические показатели
(количество циклов, производительность,
простои);
- электронный журнал
отказов;
- электронный журнал
срабатываний предохранительного торможения.
- Пульт
машиниста подъема. Пульт включает следующие органы управления и
устройства индикации:
- дисплей
общей
информации;
- аналоговый
и цифровой
указатели положения подъемных сосудов;
- стрелочный
указатель
скорости;
стрелочный указатель нагрузки (тока) главного привода;
- стрелочный
указатель
давления в тормозной системе;
- светодиодные
индикаторы
состояния главного и вспомогательных приводов;
- акустические
излучатели;
- переключатели
режимов
работы;
- кнопки
«Пуск», «Аварийный
останов», «Сброс аварийного останова
(зарядка)», «Сигнал пуска», тестовые
кнопки.
В целом система управления
организована в виде локальной сети с
использованием быстродействующих каналов для обмена информацией между
устройствами автоматики, главным приводом, пультом управления,
системами стволовой сигнализации и связи и системой диспетчеризации
(см. рисунок 1). Основу структуры представляет локальная промышленная
сеть на базе протоколов Profibus или Modbus. Для связи с
видеотерминалом пульта управления и системой диспетчеризации может
использоваться сеть Ethernet. Датчики подъемной установки подключены к
входам модулей ввода-вывода контроллеров, входящих в состав
программно-аппаратного комплекса. Через систему стволовой сигнализации
поступает информация от датчиков в стволе, системы загрузки-разгрузки и
пультов местного управления и средств связи, находящихся в
шахте.
Выводы
Применение современных средств
микропроцессорной техники позволяет
реализовать унифицированную систему с программно-аппаратными
компонентами, выполняющую функции управления различными типами главного
привода шахтных подъемных машин, режимами аварийного торможения,
измерения, контроля, отображения и хранения информации о положении и
скорости подъемных сосудов.
Такая система легко интегрируется в единую АСУТП угольного предприятия.
Список
использованной
литературы
- ABB
Control IT for AC
800M/C, Control Software and Tools, Copyright.
1999 ABB 3BSE 029 301 .
- Дубинский
А.А., Кац А.Б.,
Рутберг Л.Н., Марейченко И.В. Интерактивная
система отображения информации о состоянии подземных подъемных машин //
Взрывозащищенное электрооборудование: Сб.науч.тр.
УкрНИИВЭ. – Донецк:
ООО
Юго-Восток, Лтд
, 2006. – С. 330–335.