Назад
в библиотеку
Поиск неисправностей цифровых
ТЭЗ по алгоритму
ведомого зонда со «статической оптимизацией»
Авторы:
Воротынцев Н.В., Зинченко Ю.Е.
Источник:
Информатика и компьютерные технологии (ИКТ‐2005) / Сборник трудов
первой международной студенческой
научно-технической конференции
— 15 декабря 2005 г.,
Донецк, ДонНТУ . — 2005, с. 321-322.
В этом докладе рассматривается
алгоритм ведомого зонда со
«статической
оптимизацией», который используется в автоматизированной
системе
диагностирования (АСД) вычислительных устройств (ВУ) для поиска
неисправностей в
цифровых типовых элементах замены (ТЭЗ).
АСД состоит из ЭВМ и поста
контроля, к которому подключается объект
диагностики (ОД). В качестве ОД рассматривается ТЭЗ, состоящий из
цифровых
микросхем (компонент), которые соединены между собой с помощью печатных
или
навесных проводников (линий связи – ЛС). Микросхемы помимо
стандартных входов и
выходов могут иметь двунаправленные выводы и выходы с открытым
коллектором или
третьим состоянием. Пост контроля подает на ОД тестовые вектора и
сравнивает
реакции на выходах ОД с эталонными реакциями. Если какая-либо реакция
не
совпадает, то тестирование прекращается и ОД признается неисправным.
Эталонные
реакции и тестовые вектора могут быть загружены в пост-контроля
предварительно,
либо они могут генерироваться параллельно с тестированием в ЭВМ.
Если ОД признан неисправным, то
с помощью зонда, который имеется у поста
контроля, можно выполнить поиск неисправности, сняв значения сигналов в
определенных контрольных точках (КТ) схемы – на выводах
микросхем. Неисправной
может быть микросхема или ЛС. Для поиска неисправности пост контроля
фиксирует
номер t первого тестового вектора T, на котором первый раз проявилась
неисправность,
и выход, на котором это произошло, эти данные передаются в ЭВМ.
Программа,
которая реализует алгоритм поиска неисправностей (АПН), анализирует
полученные
данные и сообщает в какую КТ необходимо поставить зонд и снять
значение. Зонд
ставится в указанную КТ, пост контроля подает на ОД те же самые
тестовые реакции,
но номера, которых меньше либо равны t, пока не будет зафиксирована
неисправность.
О том была ли зафиксирована неисправность в КТ, сообщается в ЭВМ, и
программа
АПН принимает решение о тестировании следующей КТ или сообщает о
найденной
неисправности. Компонент считается неисправным, если на всех его входах
значения
сигналов совпадают с эталонными, а хотя бы на одном выходе не
совпадает.
Алгоритм ведомого зонда прослеживает путь, по которому проявляется
неисправность в схеме. Путем называется последовательность компонент
соединенных
между собой линиями связи. Путь начинается на выходе схемы, на котором
была
впервые зафиксирована неисправность. Сначала по порядку проверяются
входы
компонента, который непосредственно подключен к выходу схемы. Если на
каком-либо
входе наблюдается неисправность, то делается переход к компоненту,
выход которого
непосредственно подключен к данному входу, и проверяются его входы.
Таким
образом выполняется продвижение по схеме, пока не будет найден
компонент у
которого на входах не проявляется неисправность. Так как ЛС могут быть
тоже
неисправными, то необходимо прозондировать также выход компонента,
через
который «пришли» на его входы. Если на выходе
реакция правильная, то неисправной
является ЛС, иначе сам компонент. Если к входу подключены выходы
нескольких
компонент, у которых выходы с открытым коллектором или тристабильные,
то
необходимо последовательно прозондировать входы у всех этих компонент,
а потом выходы. Если имеются двунаправленные выводы, то они
рассматриваются и как входы
и как выходы, и обрабатываются в соответствии с вышеперечисленными
правилами.
Данный алгоритм применяется для
поиска одиночных неисправностей, но с его
помощью могут быть найдены многие кратные неисправности, если повторить
процесс
поиска для каждой из них. Однако с его помощью нельзя точно
локализовать место
неисправности в комбинационном кольце и не всегда можно найти
неисправность в
группе компонент, которые связаны через двунаправленные выводы. В таких
случая
считается неисправной группа элементов.
Программа, реализующая АПН,
использует граф поиска неисправностей (ГПН),
который определяет последовательность зондирования КТ, в зависимости от
состояния
схемы. ГПН строится по описанию схемы. Использование ГПН позволяет
отделить
процесс зондирования от процесса выработки стратегии обнаружения
неисправности.
ГПН для каждой КТ содержит вершину и дуги, которые позволяют переходить
между
вершинами в зависимости от состояния КТ.
Основным параметром,
характеризующим качество АПН, является среднее
число перестановок зонда необходимое для поиска неисправности. Его
значение нужно
максимально уменьшить. Для этого предлагается «статическая
оптимизация», которая
может быть выполнена на этапе построения ГПН. Входам всех компонент
схемы
присваиваются веса, которыми являются число компонент подключенных к
входу
непосредственно или через другие компоненты. Для каждого компонента
выполняется
сортировка входов по убыванию весов. Таким образом, первыми всегда
будут
тестироваться входы с максимальным весом, что увеличивает вероятность
обнаружения неисправности. Достоинством такой оптимизация является
простота
выполнения и отсутствие необходимости изменять алгоритм построения ГПН.
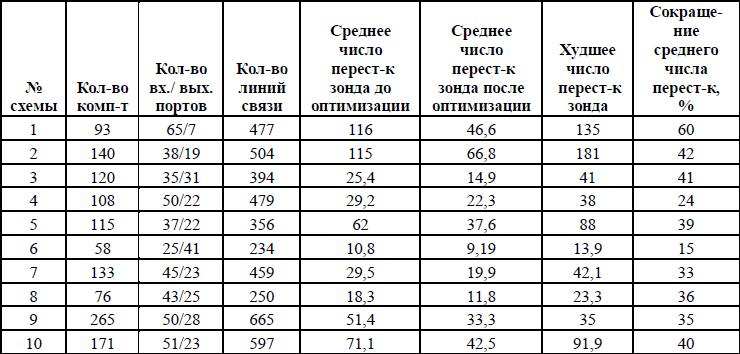
В таблице 1 приводятся
результаты выполнения оптимизации для 10 схем.
Видно, что в среднем она сокращает число перестановок зонда на 30-40%.
Параметры
схем и данные по среднему числу перестановок зонда Таблица
1
Литература
- Хаханов В.И. Техническая
диагностика цифровых и микропроцессорных
структур. – К.: ИСИО, 1995. – 242 с.
- Abramovici M. Digital System
Testing and Testable Design. – IEEE, 1990. –
570 p.
Назад
в библиотеку