
Реферат по теме выпускной работы
Содержание
- Введение
- 1. Актуальность темы
- 2. Цель и задачи исследования
- 3. Обзор исследований и разработок
- 4. Геометрическая оптическая модель системы защиты зрения от ослепления
- 5. Алгоритм нахождения координат яркого источника света
- Выводы
- Список источников
Введение
Глаза человека, по своей природе, весьма уязвимы, особенно когда приходится работать в неблагоприятной среде, как, например, при электросварке [5] или при ослеплении светом фар встречного автомобиля. Во время сварочных работ и резки металла возникает яркое световое излучение, опасное для глаз. Инфракрасные и ультрафиолетовые лучи способны вызвать ожог сетчатки, а яркие вспышки света могут повредить роговицу глаза. Однако этих опасностей можно избежать, если иметь необходимые средства защиты и правильно пользоваться ими.
Ослепление происходит из-за некоторых особенностей зрения человека. Дело в том, что глаз — крайне чувствительный орган, благодаря чему можно отлично видеть и в ночной степи, и на солнце в погожий зимний день. Глаз человека способен воспринимать яркости, отличающиеся друг от друга в миллиард раз.
Несмотря на универсальность человеческого зрения, у него существует большой недостаток: при резком изменении яркости освещения глазам требуется много времени на то, чтобы приспособиться под новое освещение. Адаптация зрачка к новому освещению занимает несколько десятков секунд. При внезапном резком изменении освещения человек не видит почти ничего.
1. Актуальность темы
Защита зрения операторов при работе с яркими вспышками света является весьма актуальной задачей. Так, например, технология сварки достигла небывалых высот, которые еще десять лет назад казались невозможными, но при этом вопрос о сохранении здоровья сварщика решен не полностью [4]. Электрическая дуга, применяемая при сварке, может повредить зрение или даже ослепить, а также приводит к утомляемости и понижению работоспособности. Этой проблемой обеспокоены многие европейские фирмы, в исследования средств персональной защиты вкладываются огромные деньги. На данный момент актуально создание интеллектуальных средств защиты, способных реагировать на яркие вспышки света.
Глаза во время сварки необходимо защищать от вредного излучения, так как их поражение происходит за доли секунды и мгновенно ощущается – от легкого ослепления до ожога роговицы глаза. Маски с обычными затемненными стеклами неудобно держать, они не обеспечивают необходимую защиту сварщику. Постоянный визуальный контроль сварочного процесса без необходимости поднятия и опускания маски улучшает качество и повышает производительность сварочных работ.
2. Цель и задачи исследования
Целью исследования является разработка автоматизированной системы управления средствами защиты зрения от ослепления яркими вспышками света при выполнении сварочных работ.
При разработке автоматизированной системы управления средствами защиты от ослепления можно выделить следующие функции:
- Определение координат яркого источника света в оптической системе видеокамеры.
- Вычисление координат в пространстве.
- Управление защитным средством.
Структурную схему системы можно представить следующим образом (рис. 1):

Рисунок 1 — Структурная схема автоматизированной системы управления средствами защиты от ослепления
(анимация: 7 кадров, 5 циклов повторения, 31 килобайт)
3. Обзор исследований и разработок
В настоящее время появились «умные» маски нового поколения с автоматически затемняющимся светофильтром [7]. Одна из них — маска, производимая компанией SPERIAN. SPERIAN изготовила партию фирменных масок «ШТОРМ». Маска предназначена для любых типов сварочных работ с возможностью регулирования задержки возврата в светлое положение, при любом освещении, в диапазоне токов от 1 до 500 А при ручной сварке (ММА), полуавтоматической сварке (MIG/MAG), аргонодуговой сварке (TIG), плазменной резке/сварке, газовой резке/сварке.
Маска имеет два режима регулировки затемнения – ручной и автоматический.
Светофильтр состоит из семи различных уровней защиты — УФ/ИК фильтр. УФ/ИК фильтр непрерывно блокирует вредную радиацию, независимо от того, включен он или выключен. Высокая скорость срабатывания (всего 0,18 мс при комнатной температуре и 0,12 мс при температуре 55°С) и оригинальный алгоритм управления светофильтром обеспечивают минимальную нагрузку на глаза сварщика в течение всего рабочего дня.
Щиток автоматически настраивает степень затемнения в зависимости от интенсивности свечения дуги: уникальная технология светосенсоров позволяет светофильтру автоматически выбирать требуемый уровень затемнения и постоянно адаптировать его под изменяющиеся условия, улавливая и оценивая интенсивность электрической дуги.
Особенности работы устройства:
- Два режима регулировки уровня затемнения: полностью автоматический или ручная регулировка в диапазоне 4/9-13 DIN
- При работе щитка в автоматическом режиме возможность дополнительной корректировки затемнения в диапазоне ±1 DIN
- Панель регулировки расположена на левой внешней левой стороне щитка, что позволяет сварщику регулировать степень затемнения, не снимая щитка
- Увеличенное поле обзора и точная цветопередача обеспечивают сварщику отличную видимость свариваемого объекта. Показания цифровых индикаторов на панелях сварочных аппаратов отлично видны сварщику, нет необходимости снимать щиток
- Наличие режима шлифовки для предотвращения срабатывания щитка на летящие искры от механической обработки
- Возможность регулировки чувствительности и скорости высветления
- Питание — фотоэлемент и батарейки, нет необходимости включать/выключать щиток (автоматическое срабатывание)

Рисунок 2 — Сварочная маска «Шторм»
Характеристики устройства:
- Регулируемая панель сенсоров устраняет влияние окружающего освещения изменением угла восприятия сенсоров от 60° до 120°
- Режим работы — ручной или автоматический
- Регулировка уровня затемнения в диапазоне 9-13 DIN
- Режим шлифовки для предотвращения срабатывания щитка на летящие искры
- Кнопка чувствительности для регулировки восприятия сенсорами электрической дуги
- Регулировка скорости высветления для защиты от послесвечения сварного шва, а также для установки индивидуальных настроек
- Батарейки 3V, 2 шт.
4. Геометрическая оптическая модель системы защиты зрения от ослепления
Работа любой телевизионной измерительной системы (ТИС) основана на том, что проецируемое оптической системой световое поле преобразуется телевизионным датчиком путем покадрового считывания информации в двумерный массив дискретных отсчетов видеосигнала [1-2]. Этот видеосигнал содержит в себе NхM элементов и представляет собой прямоугольную матрицу, имеющую M строк и N столбцов, где M и N — некоторые неравные натуральные числа. Можно считать, что за время развертки телевизионного кадра смещение изображения объекта по детектирующей поверхности датчика незначительно и его можно считать равным нулю, а соответственно и эффектами смазывания изображения можно также пренебречь.
Изображение объекта формируется оптической системой видеокамеры в плоскости фотоприемной матрицы. Аналоговый видеосигнал с выхода видеоматрицы преобразуется в цифровой сигнал с помощью АЦП и поступает для обработки в микропроцессор.
Оптическая система видеокамеры Л (рис. 3) формирует на поверхности матричного фотоприемника, расположенного в фокальной плоскости объектива f, плоское (так называемое видимое) изображение наблюдаемого объекта.
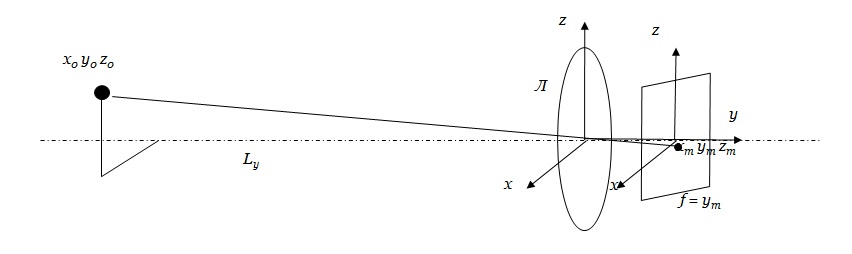
Рисунок 3 – Преобразование координат объекта оптической системой видеокамеры
Основная система координат расположена в центре оптической системы (объектива Л). Плоское изображение объекта формируется в системе координат матрицы, которая представляет собой результат параллельного переноса основной системы на расстояние ym.
Исходное изображение объекта с совокупностью координат всех его точек x0,y0,z0 преобразуется оптической системой в плоское изображение с координатами точек xm,ym,zm при ym≈f (объект расположен на расстоянии Ly>>f).
В соответствии с законами геометрической оптики связь между координатами плоского изображения объекта на матрице и реальными координатами в пространстве определяется соотношениями:
.jpg)
Расстояние до объекта Ly:
.jpg)
5. Алгоритм нахождения координат яркого источника света
Для определения координат яркого источника света можно предложить следующий алгоритм обработки изображений:
- Повышение контрастности обрабатываемого изображения, с использованием спектральных различий между фоном и объектом.
- Фильтрация изображения с целью подавления фона и помех. Удаление фона приводит к сокращению времени обработки видеоданных и повышению точности обнаружения интересующих объектов в пределах сцены. В частном случае видеонаблюдения неподвижной видеокамерой с фиксированным полем обзора, так называемый статический фон, может быть оценен количественно. В общем случае название «статический фон» условно, поскольку распределение яркости в нем постоянно меняется и для правильного выделения подвижных объектов необходима его периодическая переоценка. Оценка фона необходима, так как фон непрерывно изменяется из-за смены освещенности, зашумленности изображения фона, появления в поле зрения посторонних объектов [3].
- Выделение яркого источника света. Выделение ярких объектов и подавление стационарного фона на плоском изображении может производиться с помощью простого разностного алгоритма, однако он неустойчив к изменениям яркости фона и объектов и отличается большой ресурсоемкостью.
- Выделение на изображении связанных областей повышенной яркости (сегментация объектов). После выделения на изображении областей, обладающих высокой яркостью, производится их сегментация, позволяющая сформировать объект как единый образ, характеризующийся определенной формой и размерами. Блоки, принадлежащие одному объекту, должны располагаться на кадре в одной области и образовывать связанную группу.
- Определение координат центра тяжести объекта:
Для реализации алгоритма, определяющего координаты яркого источника света, текущий кадр разобьем на прямоугольные блоки одинакового размера, и для каждого блока вычислим наибольшее различие от предыдущего кадра. В качестве меры различия вычислим сумму модулей разности яркостей пикселей MAD в пределах блока [6]:
.jpg)
где m, n — число пикселей в блоке.
.jpg)
Выводы
- Для защиты от ослепления перекрытие яркого источника света можно осуществить путем введения непрозрачной преграды, перекрывающей часть обзора.
- Рассмотрен алгоритм обработки изображений, позволяющий определять координаты яркого источника света. Данный алгоритм не обладает большой ресурсоемкостью, так как для рассматриваемой задачи нет необходимости обрабатывать изображения с высоким разрешением. Рассмотренный алгоритм необходим для разработки программного обеспечения автоматизированной системы управления средствами защиты зрения от ослепления.
- Управление данным средством защиты будет осуществляться с помощью микроконтроллеров.
- Использование предлагаемого устройства позволит без заметного снижения качественных показателей обзорности, видимости, цветности и контрастности наблюдаемых объектов уменьшить опасное воздействие избыточной световой энергии на органы зрения человека, снизить утомляемость и повысить производительность труда.
При написании данного реферата магистерская работа еще не завершена. Окончательное завершение: декабрь 2012 года. Полный текст работы и материалы по теме могут быть получены у автора или его руководителя после указанной даты.
Список источников
- Повышение точности центроидного алгоритма для определения координат малоразмерного объекта [Электронный ресурс]. – Режим доступа: http://lib.tusur.ru/cgi-bin/....
- В.В. Коротаев. Телевизионные измерительные системы: учебное пособие. / В.В. Коротаев, А.В. Краснящих. – СПб: СПбГУ ИТМО, 2008. – 108 стр.
- Телевизионные измерительные системы контроля скоростного режима дорожного движения [Электронный ресурс]. – Режим доступа: http://www.kit-e.ru/assets/....
- Европа за здоровых сварщиков: Средства защиты [Электронный ресурс]. – Режим доступа: http://uraltreid.ru/....
- Средства защиты сварщика [Электронный ресурс]. – Режим доступа: http://www.svarkainfo.ru/...
- Метод определения координат транспортных средств на изображении в телевизионных измерительных системах [Электронный ресурс]. – Режим доступа: http://www.rae.ru/...
- Маски Speedglas [Электронный ресурс]. – Режим доступа: http://www.msvarki.ru/welding/?data_id=135/