ОПРЕДЕЛЕНИЕ КООРДИНАТ ИСТОЧНИКА СВЕТА ДЛЯ АВТОМАТИЗИРОВАННЫХ СРЕДСТВ ЗАЩИТЫ ЗРЕНИЯ ОТ ОСЛЕПЛЕНИЯ
Автор: Пильгук И.С., Шатохин П.А.
Источник: Інформаційні управляючі системи та комп'ютерний моніторинг (2012) / Матерiали III мiжнародної науково-технiчної конференцiї студентiв, аспiрантiв та молодих вчених. – Донецьк, ДонНТУ – 2012
Аннотация
Пильгук И.С., Шатохин П.А. Определение координат источника света для автоматизированных средств защиты зрения от ослепления. Рассмотрена геометрическая оптическая модель системы защиты зрения от ослепления. Предложена структурная схема автоматизированной системы управления средствами защиты от ослепления. Рассмотрен алгоритм определения координат ярких источников света.
Общая постановка проблемы
Защита зрения операторов при работе с яркими вспышками света является весьма актуальной задачей. Так, например, технология сварки достигла небывалых высот, которые еще десять лет назад казались невозможными, но при этом вопрос о сохранении здоровья сварщика решен не полностью. Электрическая дуга, применяемая при сварке, может повредить зрение или даже ослепить, а также приводит к утомляемости и понижению работоспособности. Этой проблемой обеспокоены многие европейские фирмы, в исследования средств персональной защиты вкладываются огромные деньги. На данный момент актуально создание интеллектуальных средств защиты, способных реагировать на яркие вспышки света.
Исследования
При разработке автоматизированной системы управления средствами защиты от ослепления можно выделить следующие функции:
1) Определение координат яркого источника света в оптической системе видеокамеры.
2) Вычисление координат в пространстве.
3) Управление защитным средством.
Структурную схему системы можно представить следующим образом (рис. 1):

Рис. 1. Структурная схема автоматизированной системы управления средствами защиты от ослепления
В данной статье рассматривается подзадача определения координат объекта с помощью телеизмерительных средств.
Работа любой телевизионной измерительной системы (ТИС) основана на том, что проецируемое оптической системой световое поле преобразуется телевизионным датчиком путем покадрового считывания информации в двумерный массив дискретных отсчетов видеосигнала [1]. Этот видеосигнал содержит в себе NхM элементов и представляет собой прямоугольную матрицу, имеющую M строк и N столбцов, где M и N – некоторые неравные натуральные числа. Можно считать, что за время развертки телевизионного кадра смещение изображения объекта по детектирующей поверхности датчика незначительно и его можно считать равным нулю, а соответственно и эффектами смазывания изображения можно также пренебречь.
Изображение объекта формируется оптической системой видеокамеры в плоскости фотоприемной матрицы. Аналоговый видеосигнал с выхода видеоматрицы преобразуется в цифровой сигнал с помощью АЦП и поступает для обработки в микропроцессор.
Оптическая система видеокамеры Л (рис. 2) формирует на поверхности матричного фотоприемника, расположенного в фокальной плоскости объектива f, плоское (так называемое видимое) изображение наблюдаемого объекта.
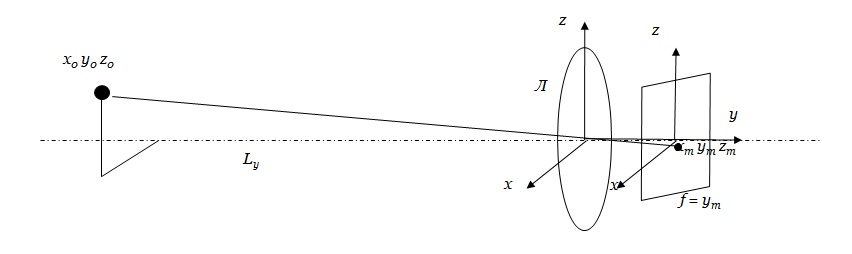
Рис. 2. Преобразование координат объекта оптической системой видеокамеры
Основная система координат расположена в центре оптической системы (объектива Л). Плоское изображение объекта формируется в системе координат матрицы, которая представляет собой результат параллельного переноса основной системы на расстояние ym.
Исходное изображение объекта с совокупностью координат всех его точек x0,y0,z0 преобразуется оптической системой в плоское изображение с координатами точек xm,ym,zm при ym≈f (объект расположен на расстоянии Ly>>f).
В соответствии с законами геометрической оптики связь между координатами плоского изображения объекта на матрице и реальными координатами в пространстве определяется соотношениями:
.jpg)
Расстояние до объекта Ly:
.jpg)
На
рисунке 3 показана структура видеосигнала и его связь с геометрическими и
яркостными характеристиками изображения. Из рисунка видно, что полное
представление о структуре видеосигнала можно получить, рассматривая его в двух
масштабах - в масштабе строки Тс и в масштабе кадра ![]() .
.

Рис. 3 Структура видеосигнала
Во время прямого хода кадровой развертки длительностью ![]() формируются
активные строки. Число активных строк в кадре
формируются
активные строки. Число активных строк в кадре ![]() .
В каждой активной строке также можно выделить время прямого хода длительностью
.
В каждой активной строке также можно выделить время прямого хода длительностью ![]() и
время обратного хода длительностью
и
время обратного хода длительностью ![]() .
Во время прямого хода строчной развертки формируется сигнал изображения,
содержащий информацию о распределении освещенности вдоль текущей строки. Во
время обратного хода строчной развертки передаются служебные сигналы – строчный
гасящий импульс (СГИ) длительностью tc
и расположенный на его вершине строчный синхронизирующий импульс (ССИ)
длительностью τс [2].
.
Во время прямого хода строчной развертки формируется сигнал изображения,
содержащий информацию о распределении освещенности вдоль текущей строки. Во
время обратного хода строчной развертки передаются служебные сигналы – строчный
гасящий импульс (СГИ) длительностью tc
и расположенный на его вершине строчный синхронизирующий импульс (ССИ)
длительностью τс [2].
Таким образом, информационный сигнал изображения и служебные сигналы разделены во времени. Кроме того, они разделены и по амплитуде (т. е. по динамическому диапазону). Действительно, сигнал изображения может принимать любые значения от уровня б (уровень белого) до уровня ч (уровень черного), а служебные сигналы – любые значения от уровня черного, на котором расположены вершины гасящих (строчных и кадровых) импульсов, до уровня с (уровень синхроимпульсов). Разделение информационных и служебных сигналов во времени и по динамическому диапазону позволяет надежно изолировать их друг от друга и избежать взаимных помех. После окончания прямого хода по кадру формируется кадровый гасящий импульс (КГИ) длительностью tк на вершине которого располагаются кадровый синхронизирующий импульс (КСИ) длительностью τк, и ССИ. Чтобы последовательность строчных синхроимпульсов не прерывалась во время действия КСИ, принимаются специальные меры, приводящие к некоторому усложнению синхросмеси (врезки, уравнивающие импульсы).
Пусть изображение объекта расположено на расстояниях Xиз и Yиз относительно координатных осей. При разложении изображения в момент времени t происходит совмещение развертывающей апертуры с изображением объекта, размер которого равен размеру элемента (точечный объект); при этом мгновенное значение видеосигнала максимально и равно Uс. В случае линейной построчной развертки справедливо соотношение:

где j – порядковый номер строки, в которой зафиксировано появление импульса от объекта; tx – интервал времени от начала данной строки до момента достижения импульсом объекта максимального значения Uс.
Учитывая, что начальным пунктом развертки является точка с координатами (-lр/2; hр/2), с которой центр апертуры совмещается в момент времени t=0, а развертка производится со скоростью Vpx по горизонтали и Vpy по вертикали, получим для координат изображения объекта:

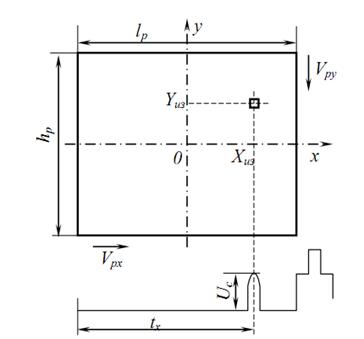
Рис. 4 Определение координат точечного объекта
Таким образом, для определения координатной информации об изображении объекта достаточно измерить временные расстояния вершины видеоимпульса от начала строчной (tx) и кадровой (t) разверток. Практически удобнее при измерении координаты Y фиксировать порядковый номер строки (j), в которой появляется видеоимпульс от объекта, и затем вычислять интервал времени t по формуле (3).
Для определения координат яркого источника света можно предложить следующий алгоритм обработки изображений:
1. Повышение контрастности обрабатываемого изображения, с использованием спектральных различий между фоном и объектом.
2. Фильтрация изображения с целью подавления фона и помех. Удаление фона приводит к сокращению времени обработки видеоданных и повышению точности обнаружения интересующих объектов в пределах сцены. В частном случае видеонаблюдения неподвижной видеокамерой с фиксированным полем обзора, так называемый статический фон, может быть оценен количественно. В общем случае название «статический фон» условно, поскольку распределение яркости в нем постоянно меняется и для правильного выделения подвижных объектов необходима его периодическая переоценка. Оценка фона необходима, так как фон непрерывно изменяется из-за смены освещенности, зашумленности изображения фона, появления в поле зрения посторонних объектов [3].
3. Выделение яркого источника света. Выделение ярких объектов и подавление стационарного фона на плоском изображении может производиться с помощью простого разностного алгоритма, однако он неустойчив к изменениям яркости фона и объектов и отличается большой ресурсоемкостью.
Для реализации алгоритма, определяющего координаты яркого источника света, текущий кадр разобьем на прямоугольные блоки одинакового размера, и для каждого блока вычислим наибольшее различие от предыдущего кадра. В качестве меры различия вычислим сумму модулей разности яркостей пикселей MAD в пределах блока:

где m, n — число пикселей в блоке.
4. Выделение на изображении связанных областей повышенной яркости (сегментация объектов). После выделения на изображении областей, обладающих высокой яркостью, производится их сегментация, позволяющая сформировать объект как единый образ, характеризующийся определенной формой и размерами. Блоки, принадлежащие одному объекту, должны располагаться на кадре в одной области и образовывать связанную группу.
5. Определение координат центра тяжести объекта:

Выводы
Рассмотрена структура видеосигнала и алгоритм обработки изображений, позволяющий определять координаты яркого источника света. Данный алгоритм не обладает большой ресурсоемкостью, так как для рассматриваемой задачи нет необходимости обрабатывать изображения с высоким разрешением. Рассмотренный алгоритм необходим для разработки программного обеспечения автоматизированной системы управления средствами защиты зрения от ослепления.
Литература
1. Повышение точности центроидного алгоритма для определения координат малоразмерного объекта / Светлаков А.А., Мартышевский Ю.В. // Доклады Томского государственного университета систем управления и радиоэлектроники. – 1999. – №2 – С. 159-167.
2. В.В. Коротаев. Телевизионные измерительные системы: учебное пособие. / В.В. Коротаев, А.В. Краснящих. – СПб: СПбГУ ИТМО, 2008. – 108 стр.
3. Телевизионные измерительные системы контроля скоростного режима дорожного движения / Макарецкий Е.А., Овчинников А.Н., ХиеуНгуен Лием // Компоненты и технологии. – 2007. – №4 – С. 34–37.