
Тема реферату: Визначення оcновних параметрів математичної моделі й обґрунтування методів підвищення якості доплерівського пеленгатора
Зміст
- Вступ
- 1. Актуальність теми
- 2. Цілі та задачі дослідження, очікувані результати
- 3. Існуючі методи радіопеленгації.
- 3.1 Амплітудний метод
- 3.2 Фазовий метод
- 4. Огляд доплерівського пеленгатора з рухомою антеною.
- Высновки
- Перелік використаної літератури
Вступ
Радіопеленгація – область радіотехніки, предметом якої є виявлення напрямку на різні об'єкти, визначення їх місця розташування і параметрів руху. Радіопеленгація грунтується на прийомі відбитих від різних об'єктів (цілей) радіохвиль або власних випромінювань об'єктів. За характером сигналу, який приймається, радіолокаційні станції, ділять на три види: активні, з активним відповіддю і пасивні [1].
Радіопеленгатор вимірює кут приходу електромагнітної хвилі до приймача, і дозволяє визначити напрямок на джерело радіовипромінювання [1].
Пеленг – кут між напрямком на джерело радіовипромінювання з точки пеленгування та деяким вихідним напрямом.
В активній радіолокаційної станції приймається сигнал, утворений після відбиття від мети випроміненого (зондуючого) сигналу.
У радіолокації з активною відповіддю на об'єкті радіолокаційного спостереження (РЛН) встановлюється відповідач – Приймальнопередавальний пристрій, який приймає зондуюче сигнал, підсилює і перевипромінює його в напрямку радіолокаційної станції (РЛС). Це робиться для збільшення перешкодостійкості або підвищення дальності дії РЛС. Характерним прикладом цього напряму є система державного розпізнавання, в якій об'єкт оснащений активним відповідачем, випромінюючим електромагнітну хвилю у відповідь на запитну (опромінювальних) хвилю радіолокатора.
У пасивної радіолокації зондуюче сигнал не випромінюється, а приймається лише власне випромінювання об'єкта радіолокаційного випромінювання [4].
В данной магистерской работе будут рассмотрены пассивные радиолокационные станции
1. Актуальність теми
В даний час найбільш затребуваними є широкодіапазонні пеленгаційної системи. Для реалізації яких найкращим способом підходять фазові радіопеленгатори. Так само відмінною особливість цих пеленгаторів є те, що для них не має принципового значення вид модуляції прийнятих коливань. Пеленгатори цього типу дозволяють вирішити завдання зменшення помилок викликаних непостійністю фази прийнятих коливань. Розробками систем заснованих на базі цього методу займаються такі фірми як «Roden & Sсhwarz», «Fernau», «ОКБ МЕІ» «ІРКОС».
2. Цілі та задачі дослідження, очікувані результати
Мета даної магістерської роботи - порівняльний аналіз схем побудови доплерівського пеленгатора, та визначення меж їх застосування.
Основні завдання дослідження:
- Аналіз методів роботи доплерівських пеленгаційної пристроїв;
- Опис різних варіантів схем побудови доплерівського пеленгатора;
- Визначення переваг та недоліків кожної з схем;
- Визначення областей застосування досліджуваних методів.
Предмет дослідження: структурні схеми пеленгаторів, що працюють на основі доплерівського методу визначення координат.
Для досягнення поставлених цілей необхідно провести:
- Вивчити основні методи побудови доплерівських пеленгаторів;
- Провести аналіз існуючих методів побудови доплерівських пеленгаторів;
- На підставі аналізу обрати методи, що дозволяють досягти найкращих результатів;
- Провести моделювання обраних схем, для підтвердження теоретичних результатів;
- Виявити переваги і недоліки, властиві кожному з варіантів побудови радіопеленгатора;
- Визначити межі застосування кожної із схем.
3. Існуючі методи радіопеленгації.
Для визначення кутових координат цілей використовуються пеленгаційної радіолокаційні пристрої.
Кутомірні пристрій включає антенну систему, приймач для обробки прийнятих радіолокаційних сигналів і вимірювальне пристрій. Однією з основних характеристик кутомірного пристрої є його пеленгаційної характеристика, що представляє собою залежність вихідної напруги приймача від напрямку приходу радіохвилі Uвых(φ). В залежності від того, який параметр сигналу – амплітуда, частота або фаза – надає основний вплив на формування пеленгаційної характеристики, методи вимірювання кутових координат можна поділяти на амплітудні, частотні або фазові. Практично знаходять застосування амплітудні і фазові методи [3].
3.1 Амплітудний метод
Для нього використовується антенна система з одним або декількома явно вираженими максимумами або мінімумами діаграми спрямованості. В простір випромінюються імпульси з тривалістю τ і періодом Т. Дальність до мети визначається за часом запізнювання відбитого від цілі сигналу, прийнятого антеною системою. І обчислюється за формулою d= сt/2 [6], де d – дальність, с – швидкість світла (3·108), t – час запізнювання (час минувший від моменту випромінювання сигналу до його прийому). В даний час широко відомі і використовуються наступні амплітудні методи: максимуму, мінімуму і рівносигнальний метод.
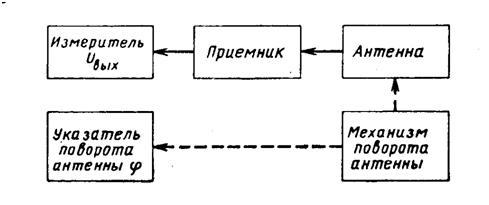
Рис. 1. Спрощена блок – схема амплітудного пеленгатора.
При пеленгації по методу максимуму відбувається безперервна зміна кутового положення антени, під час якого вона приймає сигнали цілі, визначення напрямку на ціль проводиться в той момент, коли амплітуда сигналів на виході приймача досягає максимального значення. Кут напрямку на ціль збігається з кутом повороту антени в момент коли вихідна напруга приймача досягне максимуму.
Переваги даного методу:
- Простота технічної реалізації;
- Щодо малий вплив власних шумів на точність пеленгування [3].
Недоліки:
- Низька точність вимірювання кутових координат;
- Низька роздільна здатність.
При пеленгації по методу мінімуму використовується діаграма спрямованості з явно вираженим мінімумом. Відлік кутових координат відбувається в момент зменшення рівня вихідної напруги до мінімуму. Діаграма спрямованості антени пеленгатора повинна мати в середній частині глибокий мінімум [1] (рис2).
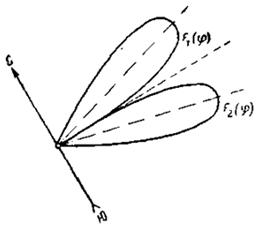
Рис 2. Діаграма спрямованості антени при пеленгації за методом мінімуму.
При пеленгації по мінімуму може бути отримана відносно висока точність вимірювання кутової координати, але амплітуда сигналу поблизу напрямки пеленга стає дуже малою.
Практично за методом мінімуму можна пеленгувати тільки джерела потужного власного випромінювання. Тому метод пеленгації по мінімуму, отримав широке застосування в радіонавігації.
Визначення максимуму (або мінімуму) сигналу може здійснюватися як візуально, за допомогою монітора, так і на слух, за допомогою головного телефону.
Рівносигнальний метод може бути реалізований при використанні однієї антени, діаграма спрямованості якої періодично змінює своє положення в просторі. В цьому випадку порівнянню підлягають сигнали, прийняті в різні моменти часу при різних положеннях діаграми спрямованості.
3.2 Фазовий метод
Метод заснований на вимірюванні різниці фаз прийнятих електромагнітних коливань. Для прийому використовуються дві рознесені в просторі антени на відстань b – зване базою.
Різниця фаз в антенах дорівнює Δφ: [8]
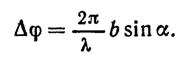
Де α кут приходу електромагнітної хвилі, λ – довжина хвілі.
Залежність Δφ (α) є в даному випадку пеленгаційної характеристикою, а її крутизна визначає точність методу.
Зміщення фаз між напругами, що наводяться в антенах залежить від напрямку приходу електромагнітної хвилі. Різниця фаз двох коливань може розглядатися як міра запізнювання одного коливання по відношенню до іншого, виражена в частках періоду коливань [7].
Фазові методи пеленгації володіють найбільшою точністю. Він може бути використаний для автоматичного спостереження за цілями по кутових координатах. Недоліком фазового методу є відсутність роздільної здатності. Одним з різновидів фазової радіопеленгації є допплерівський метод, на якому зупинимося детальніше.
4. Огляд доплерівського пеленгатора з рухомою антеною.
Ефект Доплера полягає в зміні частоти приходять електромагнітних коливань, при зміні відстані R між об'єктом (джерелом радіосигналу) і приймачем [5] . При використанні гармонійної несучої з частотою f0 і початковою фазою φ0 поточне значення фази коливання на вході приймача визначається значенням [2].
При зміні відстані R, наприклад, з – за руху випромінювача з радіальної швидкістю
Частота прийнятого коливання
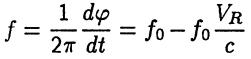
Відрізняється від частоти випромінюваного коливання на значення
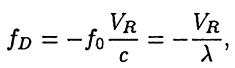
Де λ = с/f0 – довжина хвилі (за умови, що VR << c). Величина fD називається частотою Доплера, або доплерівським зсувом частоти [2].
Якщо джерело радіовипромінювання рухається на приймач – то доплеровский зсув має позитивний знак, якщо ІРВ віддаляється від приймача, доплеровский зсув матиме негативний знак.
Розглянемо фазовий пеленгатор, принцип роботи якого, заснований на доплеровском зміщенні частоти.
Фазовими називаються радіонавігаційні системи, у яких навігаційний параметр визначається шляхом вимірювання різниці фаз сигналів, що приймаються на рознесені антени [9].
Нехай одна з антен нерухома (ненаправлена в горизонтальній площині), розташована на початку координат, а друга обертається з кутовою частотою Ω по колу радіуса R в поле, що створюється віддаленим передавачем електромагнітних коливань ω0. Тоді різниця фаз прийнятих коливань в обертовій і нерухомою антени буде дорівнює [9]
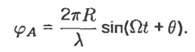
Таким чином, фаза сигналу, що наводяться в антені, буде модулювати за синусоїдальним законом, а відхилення миттєвої частоти від номінального значення ω0
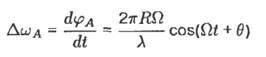
також буде змінюватися з частотою. Причому початкова фаза модулюючого коливання відповідає азимуту на пеленгуемую радіостанцію.
Спрощена структурна схема фазового пеленгатора з циклічним зміною фази по високій частоті показана на рис. 3.

Рис. 3. Спрощена блок – схема доплерівського пеленгатора.
Приймальне пристрій повинен мати антенну систему, лінійний тракт, пристрій пониження частоти, фазовий детектор, що виділяє низькочастотну складову сигналу, підсилювач низької частоти і фазовий індикатор, за яким відраховується фаза вихідної напруги, відповідна пеленгу.
Для виділення початкової фази а, отже, визначення азимута на передавач, сигнал з виходу рухомого антени подається на фазовий детектор, де порівнюється по фазі з опорною напругою, узятим з нерухомою антени.
Схеми побудови доплерівського пеленгатора.
Існує варіант побудови доплерівського пеленгатора без нерухомої антени.
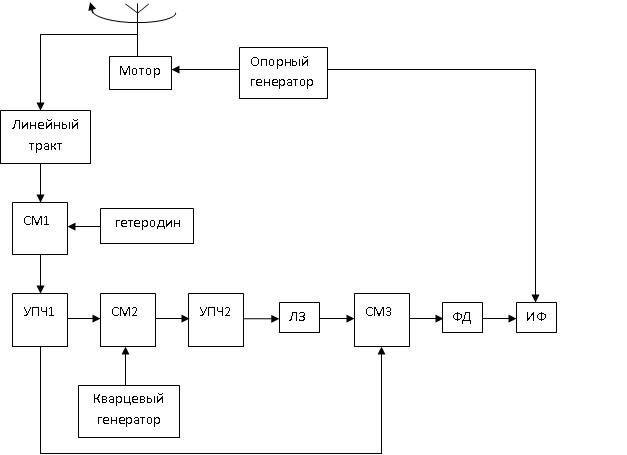
Рис. 4. Блок – схема доплерівського пеленгатора.
Принцип работы такого пеленгатора состоит в следующем.
Приймальна антена являє собою ненаправлений в горизонтальній площині вібратор, який рухається по колу радіусом R, з кутовою швидкістю рівною Ω.
При прийомі сигналів в обертовій антени буде наводитися електрорушійна сила, модульована по фазі з частотою Ω. При цьому фаза обвідної модульованих коливань виявиться безперервною функцією азимутального кута θ. Після посилення прийнятих сигналів в радіоприймальної тракті в результаті детектування може бути виділена обвідна. Шляхом зіставлення її фази з фазою опорного напруги, представляється можливим визначити пеленг на джерело радіовипромінювання [12].
В якості опорного напруги використовуються коливання місцевого гетеродина з частою Ω, узгоджені з обертанням антени так, що нульова фаза цих коливань буде мати місце при проходженні антени через північний напрям меридіана [10].
Для виділення різниці фаз, використовується наступний прийом. Шляхом змішування прийнятого сигналу в другому перетворювачі (СМ 2) з напругою кварцового генератора, виходить напруга другої проміжної частоти з тим же законом фазової модуляції, що і прийняте коливання. Ця напруга затримується в лінії затримки (ЛЗ). Після цього затриманий сигнал і сигнал першої проміжної частоти подаються на третій перетворювач частоти, де виділяються коливання з законом зміни фази, відповідним законом зміни різниці фаз огинаючих прямого і затриманого сигналів. У детекторі виділяється значення третьої проміжної частоти, фаза якої, відповідає азимуту пеленгуемой радіостанції [12].
Напруження з фазового детектора і опорного генератора подаються на індикатор фази (ІФ), з якого зчитується пеленг.
Розглянемо принцип роботи доплерівського пеленгатора з обертається і нерухомою антеною.
Рис. 5 Блок – схема диференційно – фазового радіопеленгатора. (анімація: 10 кадрів, 7 циклів повторення, затримка одного кадру – 0.5 сек., 164 кілобайтa)
Мотор обертає рухому антену по колу радіусом R, і кутовий швидкістю рівною Ω, на одному валу з мотором знаходитися так же генератор опорних напруг, що створює коливання, фазовий зсув яких дорівнює нулю, в момент проходження обертається антеною північного напрямку [10]. Ця напруга живить індикатор. Допоміжна ненаправленная антена застосовується для перетворення частоти сигналу в стабільну частоту, яка визначається гетеродином, стабілізованим кварцем. Напруги від обох антен надходять на самостійні підсилювачі (ПВЧ) і змішувачі (ЗМ 1), що живляться від загального генератора. Отримані напруги проміжної частоти роздільно посилюються в підсилювачах проміжної частоти (ППЧ). Напруга проміжної частоти каналу допоміжної антени змішується в другому змішувачі (ЗМ 2) з напругою кварцового гетеродина частоти fкв. В результаті перетворення виходить частота fпч — fкв. Напруга цієї частоти змішується в другому змішувачі (ЗМ2) з вихідною напругою УПЧ основного каналу, утворюючи напругу частоти fпч — (fпч — fкв) = fкв. Таким чином, напруга на виході другого змішувача має стабільну частоту, рівну частоті кварцового гетеродина і незалежну від частоти сигналу і частоти першого гетеродина, а також і від можливих їх змін. Після додаткового посилення напруга сигналу піддається амплітудному обмеження і подається на фазовий детектор як безпосередньо, так і через фільтр тимчасової затримки [11]. Де сигнал затримується на час τ, еквівалентну зсуву антени на кут β = Ωτ. Цим досягається зменшення індексу фазової модуляції в доплерівських пеленгатора з великою базою [10]. Фазовий детектор виділяє напруга частоти комутації. Останнє порівнюється по фазі з опорними напруженнями в індикаторі. Відлік по індикатору дає безпосередньо значення пеленга
Висновки
Розглянуті варіанти побудови доплерівського пеленгатора дозволяють вирішити задачу зменшення помилок пеленгування, що виникають через непостійності фази поля від радіопередавача, обумовленого як характером модуляції, так і нестабільністю роботи передавача. Перевагою даних пеленгаторів є можливість пеленгування станцій, що працюють з будь – яким видом модуляції.
У магістерській роботі будуть розглянуті переваги і недоліки кожної з наведених схем, та визначено можливості та межі застосування обох варіантів.
При написанні даного реферату магістерська робота ще не завершена. Остаточне завершення: січень 2013 року. Повний текст роботи і матеріали по темі можуть бути отримані у автора або його керівника, Сорочана Анатолія Григоровича, після вказаної дати.
Перелік використаної літератури
- Мазор Ю.Л., Мачусский Е.А., Правда В.И. Радиотехника: Энциклопедия. M.: Додэка XXI, 2002г 948 с.
- Котоусов А.С. Теоретические основы радиосистем. Радиосвязь, радиолокация, радионавигация. М.: Радио и связь, 2002, 224 с.
- Рембровский А. М., Ашихмин А. В., КозьминА. В., Радиомониторинг – задачи, методы, средства. 2 - е издание М. Горячая линия Телеком М. 2010. 624 с.
- Ширман Я.Д., Манжос В.Н. Теория и техника обработки радиолокационной информации на фоне помех. М.: Радио и связь, 1981. 416 с.
- Колчинский В.Е., Мандуровский И.А., КонстантиновскийМ.И. Автономные доплеровские устройства системы навигации летательных аппаратов. М. «Советское радио» 1975, 432 с.
- Родс Д.Р. Введение в моноимпульсную радиолокацию. Перевод с английского Герасимова Б.М., под редакцией Бахрах Л.Д. М. «Советское радио» 1960, 156 с.
- Кинкулькин И. Е. Рубцов В.Д. Фабрик М.А. Фазовый метод определения координат. М.: «Советское радио» 1979, 280 с.
- Финкельштейн М. И. Основы радиолокации: учебник для вузов. 2 - е издание, «Радио и связь» М. 1983, 645c.
- Айзинов М. М. Байрашевский А.М. Радиотехника и радионавигационные приборы. М.: «Транспорт» 1975, 432 с.
- Вартенесян В. А., Гойхман Э.Ш., Рогаткин М.И. Радиопеленгация. Военное издательство министерства обороны СССР. Москва 1966, 248с
- Кукес И.С. Старик М.Е. Основы радиопеленгации. М., «Советское радио» 1964, 640 с.
- Астафьев Г. П., Шебшаевич В. С., Юрков Ю. А., Радионавигационные устройства и системы. М.: «Советское радио», 1958, 863 с.
- Мазор Ю.Л., Мачусский Е.А., Правда В.И. Радиотехника: Энциклопедия. – M.: Додэка-XXI, 2002г – 948с
- Котоусов А.С. Теоретические основы радиосистем. Радиосвязь, радиолокация, радионавигация. – М.: Радио и связь, 2002 – 224с.
- Рембровский А. М., Ашихмин А. В., КозьминА. В., Радиомониторинг – задачи, методы, средства. 2 – е издание М. Горячая линия – Телеком М. 2010. - 624с
- Ширман Я.Д., Манжос В.Н. Теория и техника обработки радиолокационной информации на фоне помех. М.: Радио и связь, 1981. 416с.
- Колчинский В.Е., Мандуровский И.А., КонстантиновскийМ.И. Автономные доплеровские устройства системы навигации летательных аппаратов. М. «Советское радио» 1975, 432с.
- Родс Д.Р. Введение в моноимпульсную радиолокацию. Перевод с английского Герасимова Б.М., под редакцией Бахрах Л.Д. М. «Советское радио» 1960, 156с.
- Кинкулькин И. Е. Рубцов В.Д. Фабрик М.А. Фазовый метод определения координат. – М.: «Советское радио» 1979, 280с.
- Финкельштейн М. И. Основы радиолокации: учебник для вузов. 2 – е издание, «Радио и связь» М. 1983.
- Айзинов М. М. Байрашевский А.М. Радиотехника и радионавигационные приборы. М.: «Транспорт» 1975, 432с.
- Вартенесян В. А., Гойхман Э.Ш., Рогаткин М.И. Радиопеленгация. Военное издательство министерства обороны СССР. Москва-1966, – 248 с.
- Кукес И.С. Старик М.Е. Основы радиопеленгации. М., «Советское радио» 1964, 640с.
- Астафьев Г. П., Шебшаевич В. С., Юрков Ю. А., Радионавигационные устройства и системы. – М.: «Советское радио», 1958. – 863 с.